农用机器人行走平台的制作方法
- 国知局
- 2024-08-01 08:03:04
本发明涉及农用机械的,特别是涉及一种农用机器人行走平台。
背景技术:
1、在农用机械方面,农用机器人在田间行走有两个难点;一个难点是如何使农用机器人的行走尽可能避免破坏农作物;另一个难点是在农田中行走中尽可能小幅度的转向;现有的农用机器人的行走机构多是轮胎式或履带式的,一方面其行走对农作物破坏较为严重,另一方面其行走转向路线是一道弧线,途径的农田区域也大。如申请公布号为cn114275070a的发明专利申请行走式农田移动平台机器人,该机器人虽然舍弃了转向腿,转向时依靠两侧行走轮行走不同的步幅,即一侧行走轮的行进步幅大于另一侧行走轮的行进步幅,就可以向另一侧转向。该机器人的转向过程实质上还是模拟轮胎式、履带式的转向过程,不可避免影响的农田区域很大。
技术实现思路
1、本发明的目的是为了解决上述问题,提供一种农用机器人行走平台。
2、本发明的技术方案是:一种农用机器人行走平台,包括行走机构、转向机构以及平台本体;行走机构用于农用机器人的直线行走;转向机构用于农用机器人的转向;平台本体则用来承载;行走机构有两个,对称设置在平台本体两侧,分别承担平台本体两侧的行走;每个行走机构均包括有两个并排设置齿牙朝内的行走齿条、设置在行走齿条之间的行走电机、行走齿轮;行走电机与平台本体相接;行走齿轮与行走电机驱动连接,与两个行走齿条同时啮合;行走电机驱使行走齿轮转动;转动的行走齿轮作用于行走齿条,使同一个行走机构的行走齿条背向移动;行走齿条顶部与平台本体相接,以形成支撑;行走齿条的两端设有竖向升降组件;竖向升降组件底部设有竖向的支腿部件;竖向升降组件能够驱使支腿部件竖向升降;当支腿部件竖向上升时,支腿部件能够超出农作物;当支腿部件竖向下降时,支腿部件能够插入长满农作物的农田中,形成对平台本体的支撑;支腿部件在升降过程中,因为是竖向穿插农田的原因,所以对农作物的破坏和影响均减小到最小;
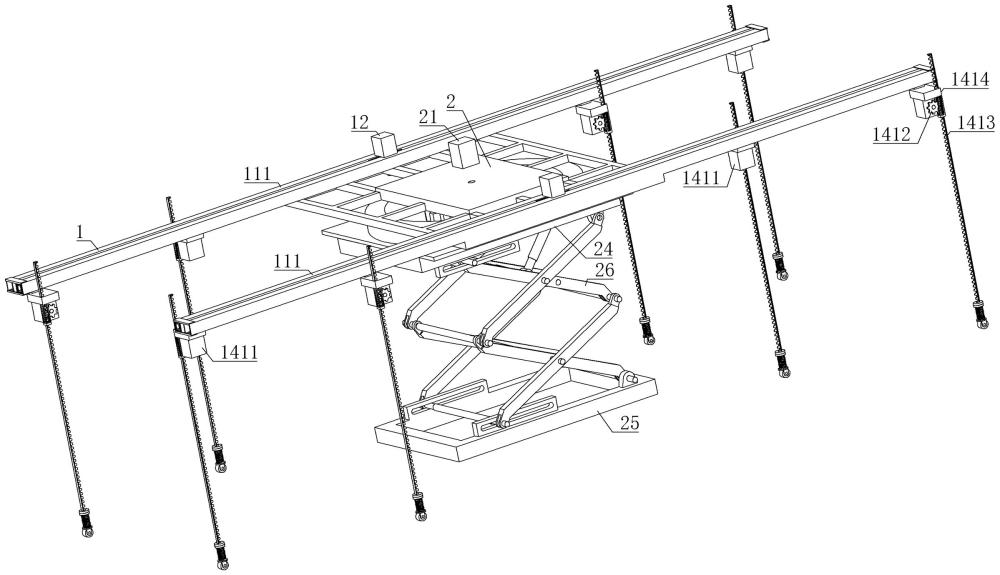
3、转向机构设置在平台本体中心下方,包括竖向设置的转向电机、转向小齿轮、转向大齿轮、顶架、底架;转向电机与平台本体固接;转向电机的输出端贯穿平台本体与转向小齿轮同轴固接,以驱使转向小齿轮转动;转向小齿轮与转向大齿轮啮合;转动的转向小齿轮驱使转向大齿轮转动;转向大齿轮水平设置,顶部与平台本体转动连接,底部与顶架固接;转动的大齿轮带着顶架旋转一定的角度;底架设置在顶架正下方;底架与顶架之间通过剪式连杆相连;剪式连杆是一种可伸缩结构;底架与顶架在同一侧均设有与剪式连杆端部滑动配合的滑动长孔;滑动长孔水平设置,为剪式连杆端部移动提供导向;底架与顶架在另一侧均与剪式连杆端部铰接;剪式连杆的伸缩可作用于底架,使底架顶在农田土地上,形成支撑;顶架下方设有电动推杆甲;电动推杆甲固定端与顶架铰接;电动推杆甲输出端与剪式连杆的连杆中部铰接;电动推杆甲作用于剪式连杆的连杆上,以改变剪式连杆的夹角;剪式连杆的夹角变大时,剪式连杆回缩,底架上升;剪式连杆的夹角变小时,剪式连杆外伸,底架下降;电动推杆甲作用于剪式连杆,可使底架竖向升降;当底架与地面相抵形成平台本体的支撑时,平台本体不再需要依赖行走机构的支腿部件与地面建立支撑,可通过竖向升降机构将支腿部件抬升到农作物以上;然后转向电机驱使转向小齿轮转动;转向小齿轮与转向大齿轮相配合,使平台本体相对底架旋转一定角度;最后竖向升降组件驱使支腿部件竖向下降,与地接触形成新的支撑点;电动推杆甲驱使剪式连杆回缩,将底架抬升到农作物以上位置;平台本体两侧的行走机构交替与地面形成支撑点,驱使机器人行走。
4、优选的,行走机构还包括相互套装滑动的导引套管和行走套管;导引套管套装在行走齿条之外,与平台本体相接;行走套管与行走齿条端部固接;相互配合的导引套管、行走套管可加强行走齿条端部的结构强度,以保障行走齿条平稳动作;导引套管底面端部设有轴向的行程长孔;该行程长孔长度与行走齿条的齿牙段长度相当,也大概是机器人行走步幅的一半长度;竖向升降组件顶部穿过行程长孔与导引套管相接,以获得来自支腿部件的支撑。
5、进一步的,行走套管侧面外壁转动配合有滚动轮;滚动轮侧面与导引套管内壁相抵。滚动轮可减少行走套管与导引套管的滑动摩擦,使得行走齿条平稳移动。
6、优选的,支腿部件包括固定杯、缓冲弹簧、导引轴、支撑轮;固定杯顶部与竖向升降组件底部相接;导引轴顶部设有截面为多边形的滑动块;固定杯内设有与滑动块滑动配合的滑动孔;导引轴中部竖向贯穿固定杯底部;导引轴底部设有限位块;缓冲弹簧套装在固定杯中下部以及导引轴的中部;缓冲弹簧顶端与固定杯顶部相抵;缓冲弹簧底端与限位块顶面相抵;缓冲弹簧为支腿部件与地面接触,建立支点进行缓冲;滑动块与滑动孔相配合,为导引轴竖向滑动提供导向;支撑轮竖向设置在限位块底部;滑动块与滑动孔的配合也为支撑轮进行水平限位,确保支撑轮相对行走齿条姿态不变。
7、进一步的,支撑轮与限位块转动连接,可在支撑轮与地面接触时稍微转动,以适应农田坑洼的地形。
8、优选的,竖向升降组件包括竖向升降电机、升降齿轮、升降齿条;升降齿条的下端部连接支腿部件;竖向升降电机与行走齿条端部固接,与升降齿轮驱动连接;升降齿轮与升降齿条啮合;竖向升降电机驱使升降齿轮转动;升降齿轮作用于升降齿条,使升降齿条竖向升降。
9、优选的,竖向升降组件为电动推杆乙;电动推杆乙的固定端与行走齿条端部固接;电动推杆乙的输出端与支腿部件相接;电动推杆乙的输出端外伸,使得支腿部件下降与地面接触,形成平台本体的支撑;电动推杆乙的输出端内缩,使得支腿部件上升高于农作物。
10、优选的,竖向升降组件包括贯穿轴式直线步进电机以及与步进电机配合的丝杠;步进电机与行走齿条端部固接;丝杆下端与支腿部件相接;贯穿轴式直线步进电机驱使丝杠竖向移动,从而影响支腿部件的升降。
11、本发明的有益效果是:本发明的农用机器人行走平台,具有以下优点:
12、(1)本发明的支腿部件通过竖向升降组件进行竖向升降,对农作物的影响为最小程度;平台本体两侧的行走机构用于机器人的直线行走;转向机构用于机器人在原地进行转向,尽量缩小对农田影响范围。本发明的机器人在尽量不破坏农作物的情况下,在农田内行走,在农田转向时影响的区域也是尽量小,从而尽可能地保护生长期的农作物;
13、(2)本发明的导引套管、行走套管相互配合可加强行走齿条端部的结构强度,以保障行走齿条平稳动作。
技术特征:1.一种农用机器人行走平台,包括行走机构、转向机构以及平台本体,其特征在于,行走机构有两个,对称设置在平台本体两侧;每个行走机构均包括有两个并排设置齿牙朝内的行走齿条、设置在行走齿条之间的行走电机、行走齿轮;行走电机与平台本体相接;行走齿轮与行走电机驱动连接,与两个行走齿条同时啮合;行走齿条顶部与平台本体相接;行走齿条的两端设有竖向升降组件;竖向升降组件底部设有竖向的支腿部件;
2.根据权利要求1所述的农用机器人行走平台,其特征在于:行走机构还包括相互套装滑动的导引套管和行走套管;导引套管套装在行走齿条之外,与平台本体相接;行走套管与行走齿条端部固接;导引套管底面端部设有轴向的行程长孔;竖向升降组件顶部穿过行程长孔与导引套管相接。
3.根据权利要求1所述的农用机器人行走平台,其特征在于:支腿部件包括固定杯、缓冲弹簧、导引轴、支撑轮;固定杯顶部与竖向升降组件底部相接;导引轴顶部设有截面为多边形的滑动块;固定杯内设有与滑动块滑动配合的滑动孔;导引轴中部竖向贯穿固定杯底部;导引轴底部设有限位块;缓冲弹簧套装在固定杯中下部以及导引轴的中部;缓冲弹簧顶端与固定杯顶部相抵;缓冲弹簧底端与限位块顶面相抵;支撑轮竖向设置在限位块底部。
4.根据权利要求3所述的农用机器人行走平台,其特征在于:支撑轮与限位块转动连接。
5.根据权利要求1所述的农用机器人行走平台,其特征在于:竖向升降组件包括竖向升降电机、升降齿轮、升降齿条;升降齿条的下端部连接支腿部件;竖向升降电机与行走齿条端部固接,与升降齿轮驱动连接;升降齿轮与升降齿条啮合。
6.根据权利要求1所述的农用机器人行走平台,其特征在于:竖向升降组件为电动推杆乙;电动推杆乙的固定端与行走齿条端部固接;电动推杆乙的输出端与支腿部件相接。
7.根据权利要求1所述的农用机器人行走平台,其特征在于:竖向升降组件包括贯穿轴式直线步进电机以及与步进电机配合的丝杠;步进电机与行走齿条端部固接;丝杆下端与支腿部件相接。
技术总结本发明涉及一种农用机器人行走平台;该行走平台包括行走机构、转向机构以及平台本体;行走机构对称设置在平台本体两侧,包括有两个行走齿条、行走电机、行走齿轮;行走电机通过行走齿轮驱使行走齿条移动;行走齿条的两端设有竖向升降组件;竖向升降组件底部设有竖向的支腿部件;转向机构设置在平台本体中心下方,包括转向电机、转向小齿轮、转向大齿轮、顶架、底架;转向电机的输出端贯穿平台本体与转向小齿轮同轴固接;转向大齿轮顶部与平台本体转动连接,底部与顶架固接,中间与转向小齿轮啮合;底架与顶架之间通过剪式连杆相连;支腿部件竖向升降对农作物影响最小;转向机构使机器人原地转向,尽量缩小对农田影响范围,保护农作物。技术研发人员:仲继锋,张凯,姜俊玲,张爱中受保护的技术使用者:河南省中威春雨生物科技研究院(普通合伙)技术研发日:技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240722/230151.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
支腿总成和车辆的制作方法
下一篇
返回列表