马达控制装置的制作方法
- 国知局
- 2024-08-01 08:18:20
该发明涉及控制转向角控制用的电动马达的马达控制装置。
背景技术:
1、在下述专利文献1公开了一种马达控制装置,包含:手动转向操纵指令值运算部,使用转向操纵转矩运算手动转向操纵指令值;综合角度指令值运算部,将手动转向操纵指令值与自动转向操纵指令值相加,来运算综合角度指令值;以及控制部,基于综合角度指令值,对电动马达进行角度控制。
2、专利文献1的手动转向操纵指令值运算部使用参考eps模型运算手动转向操纵指令值。具体而言,手动转向操纵指令值运算部基于用于给予假想反作用力的包含弹簧常数以及粘性阻尼系数作为系数的运动方程式,运算手动转向操纵指令值。考虑将弹簧常数以及粘性阻尼系数设计为在驾驶员进行了转向操纵介入的情况下产生适当的转向操纵反作用力。
3、专利文献1:日本特开2019-194059号公报
4、在专利文献1所记载的马达控制装置中,能够设计驾驶员进行了转向操纵介入的情况下的反作用力特性,但在转向操纵介入后驾驶员从转向盘放手返回到自动驾驶时的返回特性(手动转向操纵指令值收敛为零的特性)成为顺其自然。换句话说,在返回到自动驾驶时,根据为了转向操纵介入时的转向操纵反作用力而设计的特性,手动转向操纵指令值收敛为零。
5、相反在优先返回特性,对弹簧常数以及粘性阻尼系数进行了设计的情况下,转向操纵介入中的反作用力特性成为顺其自然。
技术实现思路
1、该发明的一实施方式的目的在于提供能够独立地设定转向操纵介入中的反作用力特性、和放手后的返回特性的马达控制装置。
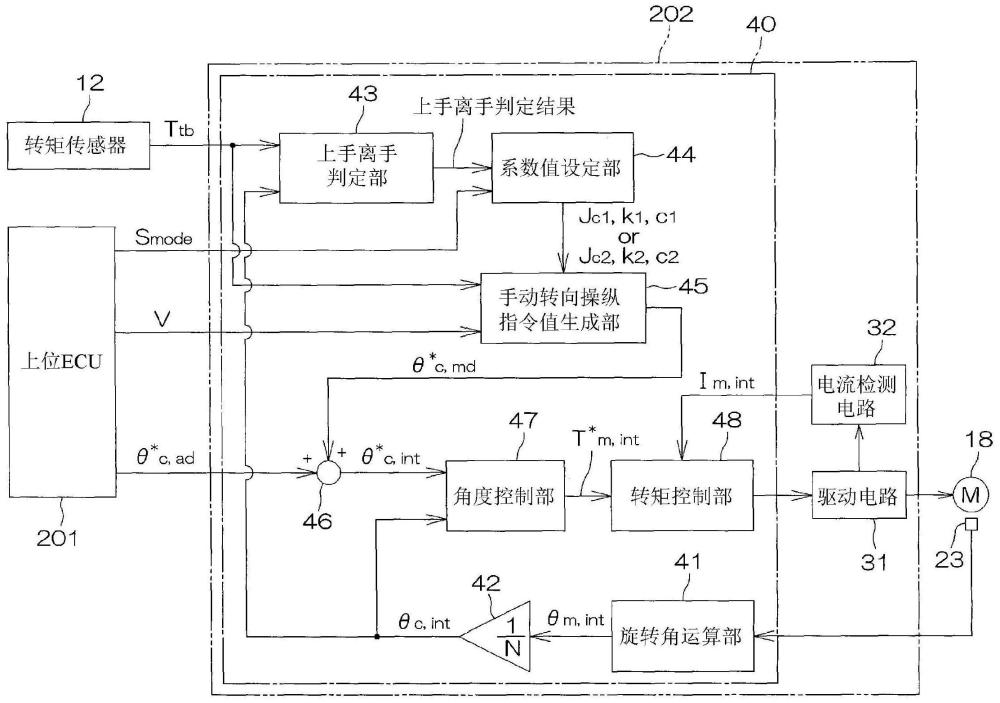
2、本发明的一实施方式提供一种马达控制装置,包含:手动转向操纵指令值生成部,生成手动转向操纵指令值;综合角度指令值运算部,将上述手动转向操纵指令值与在自动驾驶模式时被给予的自动转向操纵指令值相加,来运算综合角度指令值;控制部,基于上述综合角度指令值,对转向角控制用的电动马达进行角度控制;以及上手离手判定部,判定是驾驶员把持方向盘的把持状态,还是驾驶员未把持上述方向盘的放手状态,上述手动转向操纵指令值生成部构成为基于运动方程式生成上述手动转向操纵指令值,上述马达控制装置还包含系数值变更部,该系数值变更部根据上述上手离手判定部的判定结果,变更上述运动方程式所包含的系数中的至少一个系数的值。
3、在该构成中,能够独立地设定转向操纵介入中的反作用力特性和放手后的返回特性。
技术特征:1.一种马达控制装置,包含:
2.根据权利要求1所述的马达控制装置,其中,
3.根据权利要求1或者2所述的马达控制装置,其中,
技术总结马达控制装置包含:手动转向操纵指令值生成部,生成手动转向操纵指令值;以及上手离手判定部,判定是驾驶员把持方向盘的把持状态,还是驾驶员未把持方向盘的放手状态。手动转向操纵指令值生成部构成为基于运动方程式生成手动转向操纵指令值。马达控制装置还包含系数值变更部,该系数值变更部根据上手离手判定部的判定结果,变更运动方程式所包含的系数中的至少一个系数的值。技术研发人员:小路直纪,板本英则,玉泉晴天,玉木宏昌,新田真吾,周昕,辻井俊介受保护的技术使用者:株式会社捷太格特技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240722/231088.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表