一种电子导向胶轮系统时刻表生成方法与流程
- 国知局
- 2024-08-01 08:24:51
本发明涉及轨道交通控制,更具体的说,涉及电子导向胶轮系统中一种与城市交通信号匹配的电子导向胶轮系统时刻表生成方法。
背景技术:
1、随着城市交通拥堵问题日益严重,一种电子导向胶轮系统解决方案应运而生。电子导向胶轮系统车辆作为其核心组成,通过主动安全控制、车载信号控制、机器视觉控制等技术进行电子约束的全电力驱动,沿虚拟轨道运行。它具有多模块灵活编组、适应多种路权、基础设施投资小、城市适应性高等特点,展现出良好的应用前景。
2、电子导向胶轮系统车辆通常在城市道路上行驶,与机动车、非机动车、行人等其他社会交通方式在道路交叉口等地段形成平面交叉。在这种情况下,电子导向胶轮系统车辆需要遵循道路交通信号,以保证其运行安全和效率。交通信号控制对于保障电子导向胶轮系统车辆的运行至关重要:在没有优先通行权的情况下,其运行速度、运能、准点率都难以得到保证。
3、因此,现有技术中存在为电子导向胶轮系统车辆提供优先通行信号的交通信号优先控制系统。同时,通过区域协调控制,可以降低对社会车辆的不利影响,并实现电子导向胶轮系统车辆信号优先的效果。一般来说,电子导向胶轮系统车辆的优先通行方式分为主动信号优先和被动信号优先。这两种方式经过验证,可以保证电子导向胶轮系统车辆快速、准点运行,并提高路口的通行效率。然而,这些方案的目标主要是为电子导向胶轮系统车辆提供优先通行权,而忽略了机动车的影响。
4、虽然现有的专利或论文都提出了基于公交、有轨电车、电子导向胶轮系统车辆等路面交通系统在路口处的优先功能,但还存在以下不足:
5、1)时刻表编制仅考虑运能需求,未考虑路面交通制式受道路交叉口的影响;
6、2)通过与道路交通信号系统之间构建协同控制模式,实现车辆的一路绿灯通过效率,但是未考虑对城市道路交通既有通行方式的影响。
技术实现思路
1、本发明的目的是提供一种与城市交通信号匹配的电子导向胶轮系统时刻表生成方法,解决现有技术的时刻表编制未考虑沿线道路交通影响的问题。
2、为了实现上述目的,本发明提供了一种与城市交通信号匹配的电子导向胶轮系统时刻表生成方法,包括以下步骤:
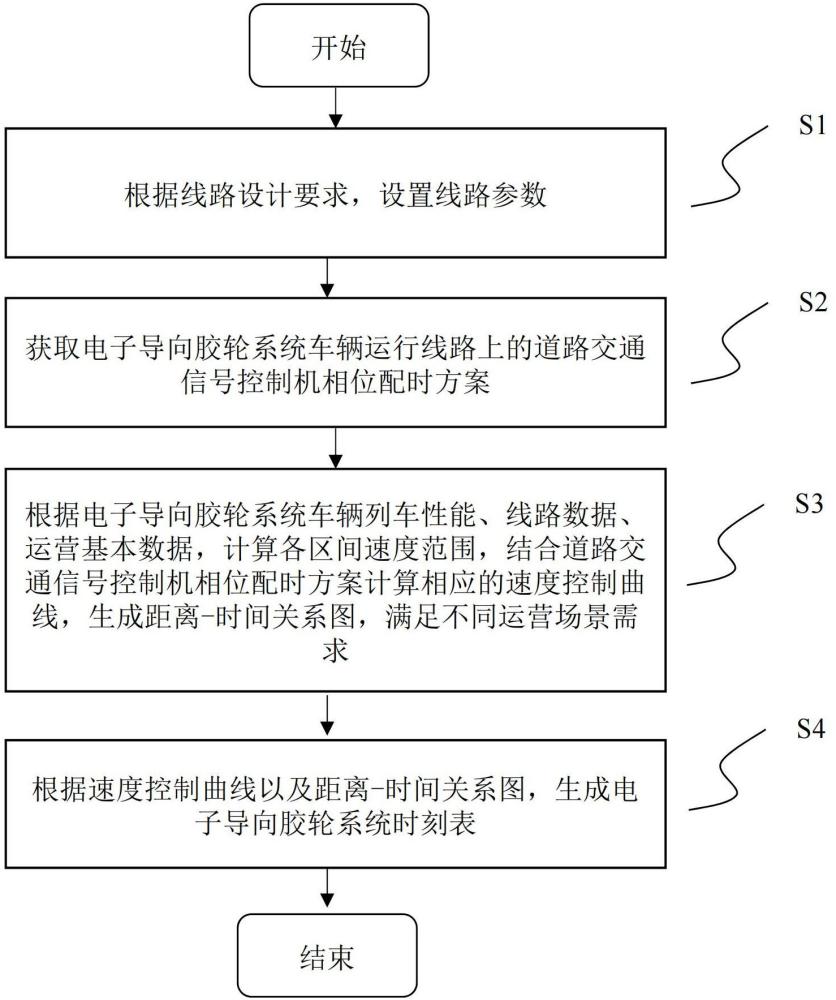
3、步骤s1、根据线路设计要求,设置线路参数;
4、步骤s2、获取电子导向胶轮系统车辆运行线路上的道路交通信号控制机相位配时方案;
5、步骤s3、根据电子导向胶轮系统车辆列车性能、线路数据、运营基本数据,计算各区间速度范围,结合道路交通信号控制机相位配时方案计算相应的速度控制曲线,生成距离-时间关系图,满足不同运营场景需求;
6、步骤s4、根据速度控制曲线以及距离-时间关系图,生成电子导向胶轮系统时刻表。
7、在一实施例中,步骤s1中的线路参数,包括:各小时应开行列车数、行车间隔时间以及设计平均旅速。
8、在一实施例中,步骤s2的道路交通信号控制机相位配时方案进一步包括:
9、根据电子导向胶轮系统车辆可否通行当前路口,将当前路口的道路交通信号控制机配时区分为“电子导向胶轮系统车辆通行时间”及“电子导向胶轮系统车辆不可通行时间”。
10、在一实施例中,所述步骤s2进一步包括:
11、通过指定平台获取道路交通信号控制机相位配时方案。
12、在一实施例中,所述步骤s3进一步包括:
13、根据电子导向胶轮系统车辆在起讫点场景,基于优选电子导向胶轮系统车辆通行时间通过的原则,建立不同运营场景对应的速度模型。
14、在一实施例中,所述电子导向胶轮系统车辆在起讫点场景,包括出发场景和抵达场景;
15、所述出发场景包括:
16、按零速,自路口始端或站台出发;
17、按路口限速,从路口末端通过路口出发;
18、按路口限速,从路口始端出发;
19、所述抵达场景包括:
20、调速至路口限速,至路口始端;
21、减速至零速,至路口始端或站台。
22、在一实施例中,所述不同运营场景对应的速度模型,包括:
23、出发场景为按零速,从路口始端/站台出发,抵达场景为调速至路口限速,至下一路口始端,如果能在电子导向胶轮系统车辆可通行时间内到达路口始端,则进行下一步计算;
24、出发场景为按零速,从路口始端/站台出发,抵达场景为调速至路口限速,在电子导向胶轮系统车辆可通行时间内到达下一路口末端,实现通过路口目标;
25、出发场景为按路口限速,不停车从路口末端出发,抵达场景为调速至路口限速,至下一路口始端,如果能在电子导向胶轮系统车辆可通行时间内到达路口始端,则进行下一步计算;
26、出发场景为按路口限速,不停车从路口末端出发,抵达场景为调速至路口限速,在电子导向胶轮系统车辆可通行时间内到达下一路口末端,实现通过路口目标;
27、出发场景为按照零速,从路口始端或站台出发,抵达场景为减速至零速,至下一路口始端或站台停车。
28、在一实施例中,所述步骤s3进一步包括:
29、对单日内开行所有列电子导向胶轮系统车辆进行逐一计算,得到每列电子导向胶轮系统车辆平均旅行速度范围;
30、如果设计平均旅速在计算得到的平均旅行速度范围内,则认为当前道路交通信号相位配时方案满足电子导向胶轮系统车辆通行要求;
31、如果设计平均旅速不在计算得到的平均旅行速度范围内,则优先调整电子导向胶轮系统车辆的发车间隔。
32、在一实施例中,所述调整电子导向胶轮系统车辆的发车间隔,进一步包括:
33、在同一时间点,相邻电子导向胶轮系统车辆之间的隔离大于安全制动距离。
34、在一实施例中,所述步骤s3中电子导向胶轮系统车辆列车性能包括车重、车长、牵引特性和电制动特性;
35、所述线路数据包括站台位置、坡度、站台位置和限速;
36、所述运营基本数据包括站台停站时间。
37、本发明提供了一种与城市交通信号相匹配的电子导向胶轮系统时刻表生成方法,在不改变城市既有道路交通信号相位时方案的前提下,基于线路条件、运能需求和车辆性能,生成推荐的电子导向胶轮系统时刻表方案,以指导电子导向胶轮系统车辆的行车。该方法还具有提前预测电子导向胶轮系统时刻表是否满足平均旅行速度的功能,简化了电子导向胶轮系统与道路交通信号系统的接口,将道路交通信号系统的要求降至最低。通过避免电子导向胶轮系统车辆对道路交通的优先影响,提高了电子导向胶轮系统车辆路面行车的适应性,并减少了对既有道路交通信号系统的干扰和对关联区域的连锁反应。
技术特征:1.一种电子导向胶轮系统时刻表生成方法,其特征在于,包括以下步骤:
2.根据权利要求1所述电子导向胶轮系统时刻表生成方法,其特征在于,步骤s1中的线路参数,包括:各小时应开行列车数、行车间隔时间以及设计平均旅速。
3.根据权利要求1所述电子导向胶轮系统时刻表生成方法,其特征在于,步骤s2的道路交通信号控制机相位配时方案进一步包括:
4.根据权利要求1所述电子导向胶轮系统时刻表生成方法,其特征在于,所述步骤s2进一步包括:
5.根据权利要求1所述电子导向胶轮系统时刻表生成方法,其特征在于,所述步骤s3进一步包括:
6.根据权利要求5所述电子导向胶轮系统时刻表生成方法,其特征在于,所述电子导向胶轮系统车辆在起讫点场景,包括出发场景和抵达场景;
7.根据权利要求5所述电子导向胶轮系统时刻表生成方法,其特征在于,所述不同运营场景对应的速度模型,包括:
8.根据权利要求1所述电子导向胶轮系统时刻表生成方法,其特征在于,所述步骤s3进一步包括:
9.根据权利要求8所述电子导向胶轮系统时刻表生成方法,其特征在于,所述调整电子导向胶轮系统车辆的发车间隔,进一步包括:
10.根据权利要求1所述电子导向胶轮系统时刻表生成方法,其特征在于,所述步骤s3中电子导向胶轮系统车辆列车性能包括车重、车长、牵引特性和电制动特性;
技术总结本发明涉及轨道交通控制技术领域,更具体的说,涉及一种电子导向胶轮系统时刻表生成方法。本方法包括:步骤S1、根据线路设计要求,设置线路参数;步骤S2、获取电子导向胶轮系统电车运行线路上的道路交通信号控制机相位配时方案;步骤S3、计算各区间速度范围,结合道路交通信号控制机相位配时方案计算相应的速度控制曲线,生成距离‑时间关系图,满足不同运营场景需求;步骤S4、根据速度控制曲线以及生成距离‑时间关系图,生成电子导向胶轮系统时刻表。本发明简化了电子导向胶轮系统与道路交通信号系统的接口,提高了电子导向胶轮系统电车路面行车的适应性,减少了对既有道路交通信号系统的干扰和对关联区域的连锁反应。技术研发人员:陈杨,张红楠,张恒,吴俊亮,张洪彬,高德志,冯月阳,张兴旺,叶理辉,林澳军受保护的技术使用者:湖南中车智行科技有限公司技术研发日:技术公布日:2024/1/5本文地址:https://www.jishuxx.com/zhuanli/20240722/231647.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。