一种基于图像识别与速度积分的列车定位系统及方法与流程
- 国知局
- 2024-08-01 08:27:56
本发明属于轨道交通,具体涉及列车定位技术。
背景技术:
1、列车定位是列控系统中的重要组成部分,在现代城市轨道车辆安全运营中发挥重要作用。
2、目前常用的列车定位技术有:基于轨道电路的列车定位、基于里程计累加测距的列车定位、基于查询/应答器的列车定位等。基于轨道电路的列车定位精度取决于轨道电路的长路,不够精准;基于里程计的定位技术存在累积误差(空转、滑行等造成的计数误差;轮径磨损);基于应答器的定位,是目前运用最广的方式,但缺点是只能给出点式定位信息,高密度铺设应答器成本昂贵。
技术实现思路
1、本发明所要解决的技术问题就是提供一种基于图像识别与速度积分的列车定位系统及方法,采用较低的成本实现列车的连续定位。
2、为解决上述技术问题,本发明采用如下技术方案:
3、首先,提供了一种基于图像识别与速度积分的列车定位方法,包括如下步骤:
4、首先,采集列车前方的图像;
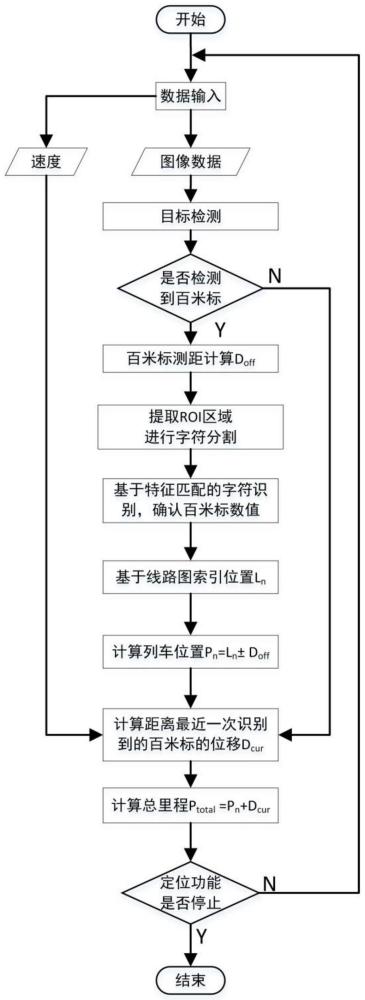
5、其次,对列车前方图像数据进行处理,得出百米标上线路标识的文本信息,并结合对应的线路地图,得出每个百米标位置的具体定位;
6、最后,当列车位于两个百米标之间的区段时,结合列车运行速度信息,计算得出距离百米标的距离,实现列车定位。
7、优选的,图像数据处理包括如下步骤:首先通过基于深度学习的目标检测算法,检测到图像中的百米标;然后截取roi区域、将百米标上线路标识的文本分割成若干个字符;再基于图像匹配算法,将每个字符与数据库中的文本标识匹配,识别出字符对应的具体信息。
8、优选的,列车当前位置为:
9、pn=ln±doff
10、当前百米标对应的绝对位置ln;相机距离百米标的距离doff;
11、当列车位于上行方向或下行方向时,分别加/减doff。
12、优选的,两个百米标的区间,基于速度信息进行积分计算,获得列车具体位置:
13、
14、其中tn是指确定pn的时刻;tcur是指当前时刻;v(t)是实时的速度信息;
15、总里程计算
16、
17、优选的,基于单目视觉测距方法,计算出相机距离百米标的距离doff,假设百米标实际物理宽度为w,在图像中的像素宽度为p,相机焦距为f,基于相似三角形原理,得到相机距离百米标的距离
18、
19、优选的,选用orb作为百米标数字标识的特征匹配算法,包含如下四个步骤:
20、1)特征选择与提取,使用fast算法快速选择字符图像中的关键特征点;
21、2)特征描述,对提取出来的特征,使用brief算法为每个关键特征点创建二进制特征描述符;
22、3)特征匹配,构建视觉特征度量指标,分别获取char_x图像与数据库中标准图像post_base_m(m=0,1,2...9)之间的特征相似度量结果;
23、4)度量结果分析,从度量结果中,选取与char_x相似度最高的标准图像post_base_m,如果此相似度值sim_val_m也同时超过设定阈值sim_thresh的,则认为待识别的文本图像char_x与标准数据库中的图像post_base_m成功匹配;根据各字符的索引值,按序组合,再通过判断是否与上一个百米标标识牌的序号连续,进行校验,继而得出可信的百米标识别结果。
24、优选的,采用列车前方安装的摄像机获取列车前方实时图像;和/或,通过车辆总线获取列车实时的速度信息。
25、其次,提供了一种列车定位系统,包括:
26、车载图像采集装置,用于采集列车前方的图像;
27、智能分析主机,所述智能分析主机设有图像处理模块和区间定位模块;
28、所述图像处理模块用于对列车前方图像进行处理,检测到百米标、获取百米标中信息,并确定百米标处的绝对位置;
29、所述区间定位模块根据所处的两个百米标的区间,基于速度信息进行积分计算,获得列车具体位置。
30、另外一方面,提供了一种电子设备,所述电子设备包括:
31、存储器,所述存储器存储有多条指令;
32、处理器,所述处理器从所述存储器中加载指令,以执行所述的列车定位方法中的步骤。
33、还提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被电子设备执行时实现所述的列车定位方法中的步骤。
34、本发明采用的技术方案,一方面通过结合深度学习和图像特征匹配两种技术手段来识别百米标识牌的信息,采用语义上很明确的数学信息来进行特征表示,对特征相似度的量化计算,达到安全识别的效果。另外一方面,本发明结合了百米标和列车速度信息,实现了列车的连续定位。
35、由于基于现有的百米标线路标识,和列车控制管理系统现有的速度信息,只需在车上安装高清摄像机和智能分析主机,成本低,可行性高。
36、本发明采用的具体技术方案及其带来的有益效果将会在下面的具体实施方式中结合附图中予以详细的揭露。
技术特征:1.一种基于图像识别与速度积分的列车定位方法,其特征在于,包括如下步骤:首先,采集列车前方的图像;
2.根据权利要求1所述的一种基于图像识别与速度积分的列车定位方法,其特征在于,图像数据处理包括如下步骤:首先通过基于深度学习的目标检测算法,检测到图像中的百米标;然后截取roi区域、将百米标上线路标识的文本分割成若干个字符;再基于图像匹配算法,将每个字符与数据库中的文本标识匹配,识别出字符对应的具体信息。
3.根据权利要求1所述的一种基于图像识别与速度积分的列车定位方法,其特征在于,列车当前位置为:
4.根据权利要求3所述的一种基于图像识别与速度积分的列车定位方法,其特征在于,两个百米标的区间,基于速度信息进行积分计算,获得列车具体位置:
5.根据权利要求3所述的一种基于图像识别与速度积分的列车定位方法,其特征在于,基于单目视觉测距方法,计算出相机距离百米标的距离doff,假设百米标实际物理宽度为w,在图像中的像素宽度为p,相机焦距为f,基于相似三角形原理,得到相机距离百米标的距离
6.根据权利要求2所述的一种基于图像识别与速度积分的列车定位方法,其特征在于,选用orb作为百米标数字标识的特征匹配算法,包含如下四个步骤:
7.根据权利要求1所述的一种基于图像识别与速度积分的列车定位方法,其特征在于,采用列车前方安装的摄像机获取列车前方实时图像;和/或,通过车辆总线获取列车实时的速度信息。
8.一种列车定位系统,其特征在于,包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被电子设备执行时实现权利要求1~7任一项所述的列车定位方法中的步骤。
技术总结本发明公开了一种基于图像识别与速度积分的列车定位系统及方法,包括如下步骤:首先,采集列车前方的图像;其次,对列车前方图像数据进行处理,得出百米标上线路标识的文本信息,并结合对应的线路地图,得出每个百米标位置的具体定位;最后,当列车位于两个百米标之间的区段时,结合列车运行速度信息,计算得出距离百米标的距离,实现列车定位。本发明结合了百米标和列车速度信息,实现了列车的连续定位,由于基于现有的百米标线路标识,和列车控制管理系统现有的速度信息,只需在车上安装高清摄像机和智能分析主机,成本低,可行性高。技术研发人员:程艳丽,田巍,李邺,尤新,秋凯楠受保护的技术使用者:浙江众合科技股份有限公司技术研发日:技术公布日:2024/1/15本文地址:https://www.jishuxx.com/zhuanli/20240722/231842.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表