巡检机器人的制作方法
- 国知局
- 2024-08-01 08:27:53
本发明涉及煤炭行业综采工作面场景下的巡检机器人,尤其是涉及一种巡检机器人。
背景技术:
1、在国家大力推行智慧矿山建设、“机械化换人、自动化减人”等背景下,许多煤矿应用了可视化远程干预型智能无人化综采,但是综采工作面内仍然需要1名工人进行巡检作业,为了实现真正无人,研发出能够应用于综采工作面的巡检装置成为煤矿智能化无人开采技术发展的重要方向。
2、中国专利cn209739058u一种采煤作业巡检机器人的驱动机构实现了综采工作面巡检方案,但是由于车体重量大、体积大,容易出现驱动动力不足、驱动轮打滑卡滞的问题,影响整机的巡检过程。
技术实现思路
1、本发明旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本发明的实施例提出一种巡检机器人,车体体积较小、重量较轻,能够简化车体内部其他设备的布局,并能保证驱动动力,并能够防侧翻。
2、本发明实施例的巡检机器人,包括:
3、车体;
4、主动轮,所述主动轮设在所述车体在第一方向上的一端,所述主动轮的旋转轴线沿第二方向延伸,所述第二方向与所述第一方向垂直,所述主动轮位于或邻近所述车体在所述第二方向上的中部;
5、驱动组件,所述驱动组件位于所述主动轮在所述第二方向上的一侧,所述驱动组件与所述车体在所述第二方向上的中部间隔开,所述驱动组件具有输出端,所述驱动组件的输出端与所述主动轮传动连接以带动所述车体在第三方向上移动,所述第三方向正交与所述第一方向和所述第二方向;和
6、导向组,所述导向组包括两个导向轮,两个所述导向轮位于所述车体在所述第二方向上的两侧,所述导向轮的旋转轴线沿所述第一方向延伸。
7、本发明实施例的巡检机器人的车体体积较小、重量较轻,能够简化车体内部其他设备的布局,并能保证驱动动力,并能够防侧翻。
8、在一些实施例中,所述驱动组件包括:
9、安装壳,所述安装壳在所述第一方向上的一端设在所述车体的所述一端,所述安装壳在所述第一方向上的另一端在所述第一方向上与所述车体间隔开;和
10、驱动电机,所述驱动电机设在所述安装壳内,所述驱动电机的输出端构成所述驱动组件的所述输出端,所述驱动电机的所述输出端的旋转轴线沿所述第一方向延伸。
11、在一些实施例中,所述驱动组件进一步包括:
12、第一锥齿轮,所述第一锥齿轮设在所述驱动电机的所述输出端上;和
13、第二锥齿轮,所述第二锥齿轮设在所述主动轮上,所述第二锥齿轮的旋转轴线与所述主动轮的旋转轴线共线,所述第二锥齿轮与所述第一锥齿轮啮合。
14、在一些实施例中,所述安装壳内设有固定板,所述驱动电机穿设在所述固定板上,所述安装壳内还设有封胶层,所述封胶层位于所述固定板在所述第一方向上背离所述驱动电机的所述输出端的一侧,所述封胶层的外侧与所述安装壳连接,所述封胶层的内侧包覆所述驱动电机。
15、在一些实施例中,所述安装壳上设有灌胶孔,所述灌胶孔与所述驱动电机的所述输出端位于所述固定板在所述第一方向上的同侧;
16、所述驱动组件进一步包括密封塞,所述密封塞设在所述灌胶孔上。
17、在一些实施例中,所述主动轮的数量为四个,两个所述主动轮在所述第二方向上邻近并轴对称分布形成一组驱动组,两组所述驱动组轴对称分布于所述车体的所述一端。
18、在一些实施例中,所述主动轮的周面上设有防滑凹槽,并且/或者,所述主动轮的周面上设有磨砂涂层。
19、在一些实施例中,所述导向组进一步包括:
20、第一安装板,所述第一安装板设在所述车体的所述一端,所述第一安装板位于所述车体在所述第二方向上的侧部,所述第一安装板上设有限位孔,所述第一安装板具有第一表面;
21、限位件,所述限位件设在所述第一安装板上,所述限位件具有第二表面,所述第二表面朝向所述第一表面,所述第二表面在所述限位孔的延伸方向上与所述第一表面相对,所述第一表面和所述第二表面形成限位滑槽;
22、第二安装板,所述第二安装板配合在所述限位滑槽内,所述第二安装板上可转动连接所述导向轮;和
23、插接件,所述插接件可移动地设在所述第二安装板上,所述插接件配合在所述限位孔内。
24、在一些实施例中,所述限位件包括相连的连接柱和限位板,所述连接柱设在所述第一安装板上,所述限位板朝向所述第一安装板的一侧面形成所述第二表面,所述第二安装板上设有连接槽,所述连接槽抵接所述连接柱。
25、在一些实施例中,所述的巡检机器人进一步包括辅助轮,所述辅助轮设在所述第二安装板上,所述辅助轮在所述第一方向上位于所述导向轮背离所述主动轮的一侧,所述辅助轮的旋转轴线沿所述第二方向延伸,所述辅助轮与所述主动轮配合抱紧轨道。
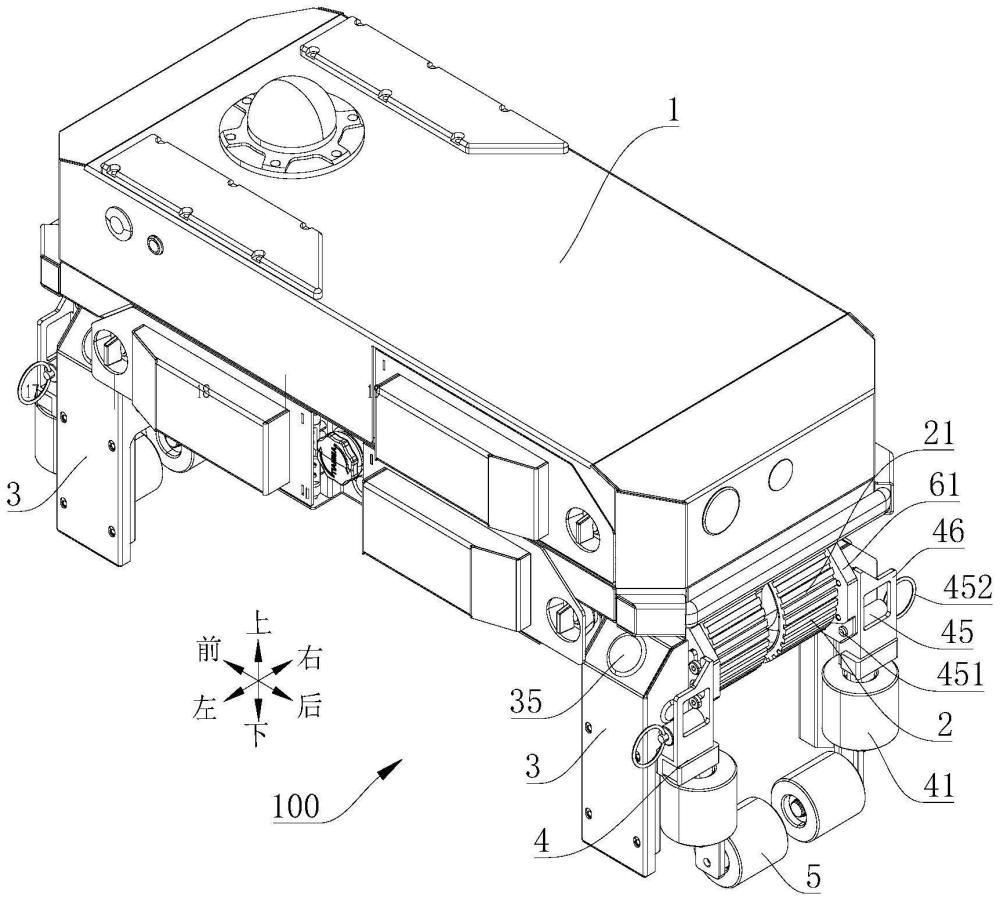
技术特征:1.一种巡检机器人,其特征在于,包括:
2.根据权利要求1所述的巡检机器人,其特征在于,所述驱动组件(3)包括:
3.根据权利要求2所述的巡检机器人,其特征在于,所述驱动组件(3)进一步包括:
4.根据权利要求2所述的巡检机器人,其特征在于,所述安装壳(31)内设有固定板(311),所述驱动电机(32)穿设在所述固定板(311)上,所述安装壳(31)内还设有封胶层(312),所述封胶层(312)位于所述固定板(311)在所述第一方向上背离所述驱动电机(32)的所述输出端的一侧,所述封胶层(312)的外侧与所述安装壳(31)连接,所述封胶层(312)的内侧包覆所述驱动电机(32)。
5.根据权利要求4所述的巡检机器人,其特征在于,
6.根据权利要求1所述的巡检机器人,其特征在于,所述主动轮(2)的数量为四个,两个所述主动轮(2)在所述第二方向上邻近并轴对称分布形成一组驱动组,两组所述驱动组轴对称分布于所述车体(1)的所述一端。
7.根据权利要求1所述的巡检机器人,其特征在于,所述主动轮(2)的周面上设有防滑凹槽(21),并且/或者,所述主动轮(2)的周面上设有磨砂涂层。
8.根据权利要求1所述的巡检机器人,其特征在于,所述导向组(4)进一步包括:
9.根据权利要求8所述的巡检机器人,其特征在于,所述限位件(43)包括相连的连接柱(432)和限位板(433),所述连接柱(432)设在所述第一安装板(42)上,所述限位板(433)朝向所述第一安装板(42)的一侧面形成所述第二表面(431),所述第二安装板(44)上设有连接槽(441),所述连接槽(441)抵接所述连接柱(432)。
10.根据权利要求8所述的巡检机器人,其特征在于,进一步包括辅助轮(5),所述辅助轮(5)设在所述第二安装板(44)上,所述辅助轮(5)在所述第一方向上位于所述导向轮(41)背离所述主动轮(2)的一侧,所述辅助轮(5)的旋转轴线沿所述第二方向延伸,所述辅助轮(5)与所述主动轮(2)配合抱紧轨道。
技术总结本发明涉及一种巡检机器人,包括车体、主动轮、驱动组件和导向组,主动轮设在车体在第一方向上的一端,主动轮的旋转轴线沿第二方向延伸,第二方向与第一方向垂直,主动轮位于或邻近车体在第二方向上的中部,驱动组件位于主动轮在第二方向上的一侧,驱动组件与车体在第二方向上的中部间隔开,驱动组件具有输出端,驱动组件的输出端与主动轮传动连接以带动车体在第三方向上移动,第三方向正交与第一方向和第二方向,导向组包括两个导向轮,两个导向轮位于车体在第二方向上的两侧,导向轮的旋转轴线沿第一方向延伸。本发明实施例的巡检机器人的车体体积较小、重量较轻,能够简化车体内部其他设备的布局,并能保证驱动动力,并能够防侧翻。技术研发人员:李言飞,郑硕,刘学君,任伟,黄骞,吴方朋受保护的技术使用者:北京天玛智控科技股份有限公司技术研发日:技术公布日:2024/1/15本文地址:https://www.jishuxx.com/zhuanli/20240722/231835.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。