一种注塑机瓶胚取出机械手的制作方法
- 国知局
- 2024-08-01 03:08:41
本技术涉及机械手,尤其涉及一种注塑机瓶胚取出机械手。
背景技术:
1、在多模腔pet瓶坯的生产过程中,瓶坯在模具中注塑完成后,需要将瓶坯从模具中一次性取出,为此常会用到机械手辅佐取出作业,而现有的机械手在取出瓶坯的过程中不方便根据不同生产情况进行调节。
2、现有中国专利(公告号:cn218615274u)提供了一种用于注塑机瓶胚取出的机械手,包括第一安装板和第二安装板,第一安装板和第二安装板之间通过连接组件装配连接,第一安装板的顶端固定安装有三个第一密封阀座,通过连接组件将第一安装板和第二安装板连接在一起,也可分开使用。
3、上述机械手在使用过程中通过设置的多个瓶胚模腔可同时取出多个瓶胚且在机械手使用的过程中还可进行拼接,其虽然一次可取出多个瓶胚,但是在取料的过程中不方便调整各个瓶胚模腔的间距,在注塑机注塑瓶胚的过程中其内不同模具之间的间距不同,因此其注塑成型的各个瓶胚之间的距离不同,若是需要取出不同模具之间的瓶胚还需重新更换机械手:
4、为此,我们提出一种注塑机瓶胚取出机械手解决上述问题。
技术实现思路
1、本实用新型提供一种注塑机瓶胚取出机械手,解决了现有技术中不方便针对不同模具取出瓶胚的技术问题。
2、为解决上述技术问题,本实用新型提供的一种注塑机瓶胚取出机械手,包括安装框和设置在安装框内用于拿取瓶胚的瓶胚模腔,所述安装框内设有调节瓶胚模腔间距的调节组件,所述调节组件包括传动轴,所述传动轴转动连接在安装框内,所述传动轴上滑动设有多个连接杆,所述连接杆的另一端连接有滑块,所述滑块的底部与瓶胚模腔顶部相连接,所述瓶胚模腔的一侧连接有真空管道,通过所述传动轴和连接杆配合使用调节所述瓶胚模腔的间距,适应多种注塑机模具的生产需求。
3、优选的,所述安装框的顶部和安装框的底部分别开设有供真空管道安装和供瓶胚模腔滑动的连接口和安装口。
4、优选的,所述安装框的一侧连接有安装板,所述安装板上开设有螺纹孔。
5、优选的,所述安装框内连接有导向杆,所述滑块滑动连接在导向杆上。
6、优选的,所述传动轴的一端延伸至安装框的外部并连接有施力杆,所述安装框的一侧设有对施力杆进行限位的定位组件。
7、优选的,所述定位组件内包括固定框,所述固定框连接在安装框的一侧,所述固定框内转动连接有传动齿轮,所述传动齿轮连接在施力杆上,所述传动齿轮的一侧啮合连接有限位齿条,所述限位齿条上连接有安装杆,所述安装杆的一端延伸至固定框的外部,所述安装杆上套接有压缩弹簧,所述压缩弹簧的一端连接在限位齿条上,另一端连接在固定框的内壁上。
8、优选的,所述安装框的后侧开设有限位凹槽,所述安装框的前侧开设有连接凸块,所述限位凹槽与连接凸块相适配。
9、优选的,所述限位凹槽内一体成型有防滑颗粒,所述防滑颗粒为橡胶。
10、与相关技术相比较,本实用新型提供的一种注塑机瓶胚取出机械手具有如下有益效果:
11、1、本实用新型中,转动传动轴带动变距沟道转动,此时滑动连接在变距沟道内的连接杆也同步进行运动,从而带动滑块和瓶胚模腔进行滑动,进而调节多个瓶胚模腔之间的间距,从而更好的满足注塑机内不同瓶胚模具取料的需求。
12、2、本实用新型中,转动施力杆可调节瓶胚模腔的间距,当调节完成后,可松开事先拉动的安装杆,使限位齿条受到压缩弹簧的弹力作用卡接在传动齿轮上将传动齿轮和施力杆锁死,避免施力杆发生反转的情况。
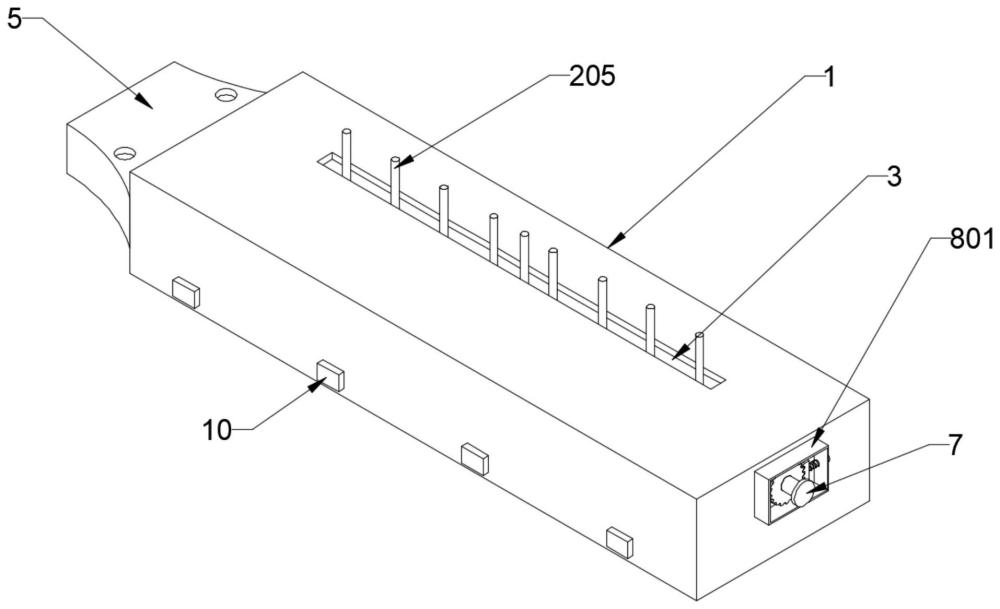
技术特征:1.一种注塑机瓶胚取出机械手,包括安装框(1)和设置在安装框(1)内用于拿取瓶胚的瓶胚模腔(204),其特征在于,所述安装框(1)内设有调节瓶胚模腔(204)间距的调节组件(2),所述调节组件(2)包括传动轴(201),所述传动轴(201)转动连接在安装框(1)内,所述传动轴(201)上滑动设有多个连接杆(202),所述连接杆(202)的另一端连接有滑块(203),所述滑块(203)的底部与瓶胚模腔(204)顶部相连接,所述瓶胚模腔(204)的一侧连接有真空管道(205),通过所述传动轴(201)和连接杆(202)配合使用调节所述瓶胚模腔(204)的间距。
2.根据权利要求1所述的一种注塑机瓶胚取出机械手,其特征在于,所述安装框(1)的顶部和安装框(1)的底部分别开设有供真空管道(205)安装和供瓶胚模腔(204)滑动的连接口(3)和安装口(4)。
3.根据权利要求1所述的一种注塑机瓶胚取出机械手,其特征在于,所述安装框(1)的一侧连接有安装板(5),所述安装板(5)上开设有螺纹孔。
4.根据权利要求1所述的一种注塑机瓶胚取出机械手,其特征在于,所述安装框(1)内连接有导向杆(6),所述滑块(203)滑动连接在导向杆(6)上。
5.根据权利要求1所述的一种注塑机瓶胚取出机械手,其特征在于,所述传动轴(201)的一端延伸至安装框(1)的外部并连接有施力杆(7),所述安装框(1)的一侧设有对施力杆(7)进行限位的定位组件(8)。
6.根据权利要求5所述的一种注塑机瓶胚取出机械手,其特征在于,所述定位组件(8)内包括固定框(801),所述固定框(801)连接在安装框(1)的一侧,所述固定框(801)内转动连接有传动齿轮(802),所述传动齿轮(802)连接在施力杆(7)上,所述传动齿轮(802)的一侧啮合连接有限位齿条(803),所述限位齿条(803)上连接有安装杆(804),所述安装杆(804)的一端延伸至固定框(801)的外部,所述安装杆(804)上套接有压缩弹簧(805),所述压缩弹簧(805)的一端连接在限位齿条(803)上,另一端连接在固定框(801)的内壁上。
7.根据权利要求1所述的一种注塑机瓶胚取出机械手,其特征在于,所述安装框(1)的后侧开设有限位凹槽(9),所述安装框(1)的前侧开设有连接凸块(10),所述限位凹槽(9)与连接凸块(10)相适配。
8.根据权利要求7所述的一种注塑机瓶胚取出机械手,其特征在于,所述限位凹槽(9)内一体成型有防滑颗粒,所述防滑颗粒为橡胶。
技术总结本技术公开了一种注塑机瓶胚取出机械手,涉及机械手技术领域,包括安装框和设置在安装框内用于拿取瓶胚的瓶胚模腔,所述安装框内设有调节瓶胚模腔间距的调节组件,所述调节组件包括传动轴,所述传动轴转动连接在安装框内,所述传动轴上滑动设有多个连接杆,所述连接杆的另一端连接有滑块,所述滑块的底部与瓶胚模腔顶部相连接,所述瓶胚模腔的一侧连接有真空管道,本技术中,转动传动轴带动变距沟道转动,此时滑动连接在变距沟道内的连接杆也同步进行运动,从而带动滑块和瓶胚模腔进行滑动,进而调节多个瓶胚模腔之间的间距,本技术可更好的满足注塑机内不同瓶胚模具取料的需求。技术研发人员:蔡启林,蔡启健,余顺江,周文强,张谋光受保护的技术使用者:云南一博高新材料有限公司技术研发日:20231031技术公布日:2024/6/26本文地址:https://www.jishuxx.com/zhuanli/20240723/211630.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表