一种无需速度传感器的鼠笼型风力发电机速度计算方法
- 国知局
- 2024-07-27 13:13:15
本发明涉及风力发电机接入电网后的测量和控制,尤其涉及一种鼠笼型风力发电机的转子速度计算方法。
背景技术:
1、首先,现在社会对清洁能源的需求越来越增多,风力发电作为一种主要的新能源形式被广泛采用。风力发电机中鼠笼型风力发电机由于具有鲁棒性、高可靠性和低维护成本等显著优势,在我国得到广泛使用。
2、然而,鼠笼型风力发电机只能用作定速发电机,允许的速度变化范围约为2%。由于整个鼠笼型风力发电机的控制完全取决于风速,而风速又取决于转子速度,因此,与其他感应发电机一样,确定准确的转子速度在鼠笼型风力发电机的功率和速度控制中起着至关重要的作用。
3、传统方法中风力发电站中采用机械位置传感器来检测鼠笼型风力发电机转子速度,进行并网或者脱网控制。然而,这些用于速度计算的外部设备可能会造成误差,因为它们在间歇风速下和电网故障情况下暂态特性误差较大,它们会导致转子速度在动态变化时测量不准确。
4、因此,以最大的精确度无延迟地测量转子速度对于鼠笼型风力发电机的可靠运行和控制是至关重要的。
技术实现思路
1、为解决上述问题,提供一种无需速度传感器的鼠笼型风力发电机速度计算方法。
2、本发明的目的是以下述方式实现的:
3、一种无需速度传感器的鼠笼型风力发电机速度计算方法,所述方法包括:
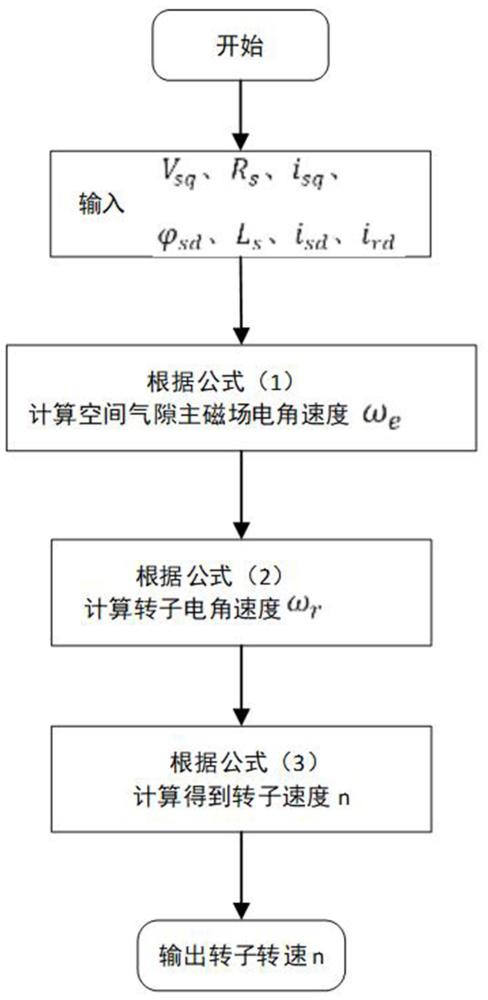
4、s1:计算鼠笼型风力发电机的空间气隙主磁场电角速度ωe;
5、s2:使用计算得到的空间气隙主磁场电角速度ωe来计算转子电角速度ωr和转子速度n。
6、所述s1具体包括:
7、空间气隙主磁场电角速度ωe由下式计算得出
8、
9、其中ωe为空间气隙主磁场电角速度,vsq为q轴参考系下定子电压,rs为定子电阻,isq为q轴参考系下定子电流,为d轴参考系下定子磁通,isd为d轴参考系下定子电流,ls为定子电感,lm为定转子互感,ird为d轴参考系下转子电流。
10、所述s2具体包括:
11、使用计算得到的空间气隙主磁场电角速度ωe来计算转子电角速度ωr和转子速度n。
12、
13、
14、其中,ωr为转子电角速度,n为转子速度,vrq为q轴参考系下转子电压,rr为转子电阻,irq为q轴参考系下转子电流,为d轴参考系下转子磁通,lr为转子电感。
15、本发明的有益效果:本发明所提出的转子速度计算方法仅需通过电压和电流来计算,不再需要速度传感器,该方法即使在动态速度变化下也能实现准确快速的速度计算,没有任何延迟。此外,本发明所提出的方法不易受机器参数变化的影响,并且无论电网是否故障,所提出的计算方法都能有效地计算并网后鼠笼型风力发电机的转子速度。
技术特征:1.一种无需速度传感器的鼠笼型风力发电机速度计算方法,其特征在于:所述方法包括:
2.根据权利要求1所述的无需速度传感器的鼠笼型风力发电机速度计算方法,其特征值在于:所述s1具体包括:
3.根据权利要求1所述的无需速度传感器的鼠笼型风力发电机速度计算方法,其特征在于:所述s2具体包括:
技术总结本发明提供一种无需速度传感器的鼠笼型风力发电机速度计算方法,所述方法包括:计算鼠笼型风力发电机的空间气隙主磁场电角速度;使用计算得到的空间气隙主磁场电角速度来计算转子电角速度和转子速度。本发明所提出的转子速度计算方法仅需通过电压和电流来计算,不再需要速度传感器,该方法即使在动态速度变化下也能实现准确快速的速度计算,没有任何延迟。此外,本发明所提出的方法不易受机器参数变化的影响,并且无论电网是否故障,所提出的计算方法都能有效地计算并网后鼠笼型风力发电机的转子速度。技术研发人员:尹俊受保护的技术使用者:华北水利水电大学技术研发日:技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240726/125444.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表