一种自主SOC芯片驱动的快速响应燃机燃料调节阀控制方法
- 国知局
- 2024-07-27 13:52:03
本发明属于自动控制领域,更具体的说涉及一种自主soc芯片驱动的快速响应燃机燃料调节阀控制方法。
背景技术:
1、soc,全称"systemonachip",即"系统单芯片",它是将一个系统的所有硬件装配到一个小型的集成电路芯片上。soc对于微电子技术的发展具有非常重要的意义,它能够使电子设备更小型化,以至于可以把更多的功能集成到一个系统中。
2、国产soc芯片是近年来中国自行设计和生产的一种高度集成的系统级单芯片,其出现是信息技术和电子工业发展的必然产品,也是电子信息产品向微型化、智能化发展的重要技术基础。通过将一个完整的系统融合在一个芯片上,可以极大地提高电子设备的运行速度和可靠性,并且缩短产品上市时间,降低生产成本。
3、然而,在应用实时性要求或复杂计算需要的系统控制如燃机燃料调节阀控制中,传统设计的soc芯片可能难以满足高速度、大数据量、复杂算法的处理需求。此外,对于需要适应各种不同运行状态和环境条件的控制系统,传统的soc芯片可能无法提供足够的适应性和灵活性。
4、开环控制是一种基于经验的控制方法,根据燃机运行状态和工况要求设定固定的燃料供应策略,缺乏实时响应和调整能力;而闭环控制则通过收集燃机的运行状态数据(如转速、燃料流量、压力、温度等),通过控制器处理并生成控制信号,调整燃料调节阀的开启程度,以实现对燃机运行状况的实时控制。
5、然而,传统的燃机燃料调节阀控制系统和方法存在一些明显的问题和限制:一方面,大多数燃机控制系统的响应速度和精度都是通过改变控制器的参数来调整的,但是由于燃机工作环境的复杂性和燃机本身的非线性特性,这种方法往往不能很好地适应不同工况下的燃机运行;另一方面,传统的控制器通常是基于线性控制理论设计的,其在处理燃机的典型非线性问题(如饱和、死区等)时性能不佳。
技术实现思路
1、本发明提出了一种自主soc芯片驱动的快速响应燃机燃料调节阀控制方法。这种方法将神经网络、双闭环pid等先进控制算法集成在soc芯片中,使得soc芯片具有强大的数据处理和实时控制能力。同时,此方法还通过实时采集和处理燃机的运行状态数据,使soc芯片能够根据不同的工况调整控制策略,极大地提高了燃机燃料调节阀控制的精度和效率。
2、为了实现上述目的,本发明是采用以下技术方案实现的:所述的控制方法包括:
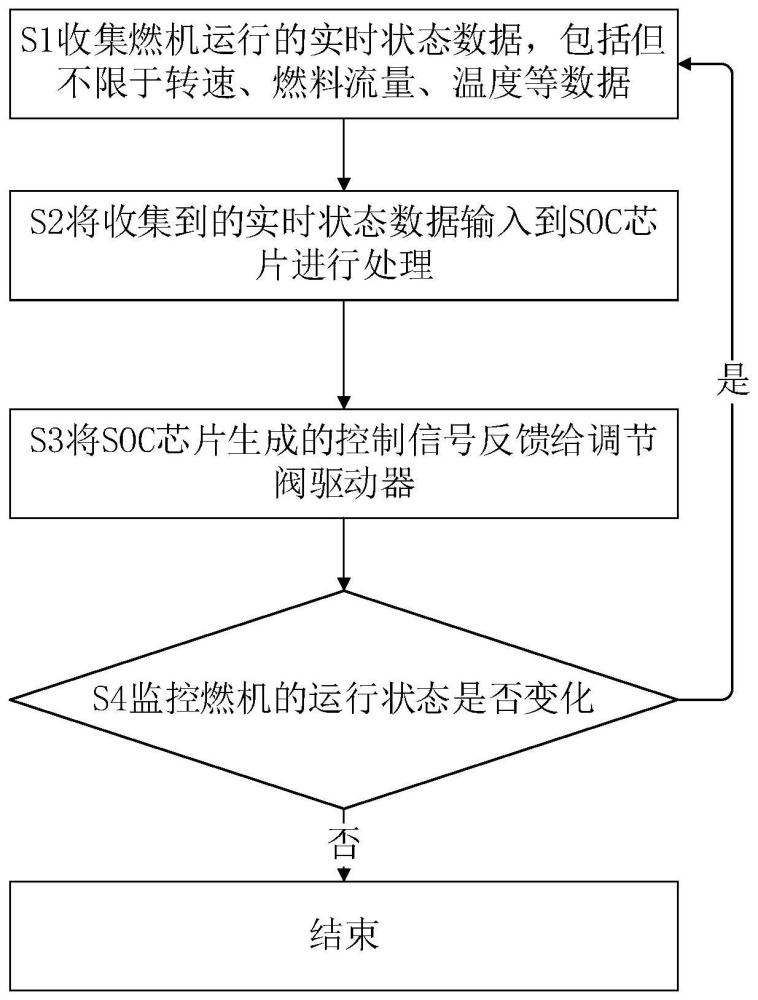
3、s1收集燃机运行的实时状态数据,包括但不限于转速、燃料流量、温度等数据;
4、s2将收集到的实时状态数据输入到soc芯片进行处理;soc芯片根据预先设置的控制算法,对输入的数据进行处理并生成控制信号;
5、s3将soc芯片生成的控制信号反馈给调节阀驱动器;调节阀驱动器根据接收到的控制信号,控制燃料调节阀的开启程度;
6、s4监控燃机的运行状态,如果燃机运行状态变化,则重复上述步骤s1到s3,根据新的运行状态数据调整燃料调节阀的开启程度。
7、进一步地,所述s1中的实时状态数据由燃机内置的传感器收集并通过数据总线发送。
8、进一步地,所述的s2中所述的控制算法采用基于神经网络的双闭环系统pid;包括以下步骤:
9、s201设计双闭环pid控制系统,通过bp神经网络对双闭环pid控制系统的参数进行整定;
10、双闭环pid控制系统参数整定方法如下:
11、s202构建bp神经网络的输出层和bp神经网络的输入层;
12、s203数据归一化处理;
13、s204隐含节点数和传输函数的确定;
14、s205采用adagrad算法进行神经网络训练学习过程中的优化;
15、s206设计bp神经网络的训练样本。
16、进一步地,所述的s201中的双闭环pid控制系统如下:双闭环控制策略存在两个串级的控制器,两个检测器和两个调节器构成主副回路,即内环和外环;pid控制器的参数称为外环pid参数,p控制器的参数称为内环p参数,外环pid参数与内环p参数的整定由bp神经网络模型完成。
17、进一步地,所述的s202中bp神经网络输出层为:
18、设定控制信号op为30.3%-33%记录阀位响应信号pv,采用飞升曲线法对调节阀进行参数辨识,获得的数学模型如下:
19、
20、分别对上述模型的输出曲线与实际输出曲线归一化,并且对归一化结果进行比较,采用此数学模型来代替实际阀进行外环pid参数整定;针对上述的数学模型,采用imc整定公式对其进行外环pid参数整定,整定结果为:
21、
22、
23、
24、其中,τc的取法为τ<τc<t,若τc取得过大,则控制系统的快速性将下降,这里τc取为
25、所述的bp神经网络输入层为:
26、分析与输出层pid参数关联性强的因素,并将其作为bp神经网络输入层参数,判断变量之间的相关密切程度,采用相关系数法,相关系数用r表示,取值范围为[-1,+1],小于零表示负相关,大于零表示正相关;相关系数的计算公式为:
27、
28、通过相关系数判断两变量之间的线性相关程度的标准是:当|r|=0时,表示x和y完全不相关;当0<|r|<0.3时,表示x和y不相关;当0.3<|r|<0.5时,表示x和y低度相关;当0.5<|r|<0.8时,表示x和y显著相关;当0.8<|r|≤1时,表示x和y高度相关;分别对t1、t1、t2、t2、k参数与pid参数做相关分析,t1、t2、k的相关程度最高,将这三个参数作为bp神经网络的输入层参数。
29、进一步地,所述的s203数据归一化处理如下:
30、对原始数据进行归一化处理,公式如下所示:
31、
32、其中x为区间[0,1]之外的数据;xmax和xmin分别为数据中的最大值和最小值;y为数据x归一化后的值;
33、对于bp神经网络的输出层参数,也进行反归一化处理,将bp神经网络输出在[0,1]之间的值转换为系统的实际输出值,即pid参数,反归一化公式如下所示:
34、x=y(xmax-xmin)+xmin
35、其中y为[0,1]之间的值;xmax和xmin分别为数据中的最大值和最小值;x为网络输出反归一化后的实际数据,即pid参数。
36、进一步地,所述的s204隐含节点数和传输函数的确定如下:
37、当隐含节点数为11个时网络具有较好的精度;隐含层的传输函数为s型正切函数tansig,输出层的传输函数为s型对数函数logsigt,输出结果被限制在[0,1]之间。
38、进一步地,所述的205采用adagrad算法
39、adagrad算法训练过程如下:
40、1)初始化参数,设定初始学习率η和一个很小的数ε防止分母为0,以及所有参数的累积梯度平方和g,初始为0;
41、2)在每一轮迭代中,首先计算目标函数的梯度g;
42、3)然后将梯度的平方累加到g,即:g=g+g*g;
43、4)调整学习率:对每个参数,其学习率调整为初始学习率
44、5)更新参数:theta=theta-学习率*g。
45、进一步地,所述的s206设计bp神经网络的训练样本如下:
46、利用imc整定公式加手动微调,寻找到对应阀的最优外环pid参数,内环p参数已被固定,此组pid参数能够使调节阀定位控制系统调节时间短,超调量小,稳定性好;以此作为bp神经网络的输出层参数,通过调节阀做全开全关实验,自动获取t1、t2、k参数;以此作为bp神经网络的输入层参数,最终获得多组bp神经网络的训练样本;获取样本数35组,其中30组数据用于bp神经网络训练,5组数据用于测试。
47、本发明有益效果
48、本发明提供了一种基于自主soc芯片驱动的快速响应燃机燃料调节阀控制方法。通过实时收集并处理燃机运行状态数据,并快速反馈调节阀开启程度的控制命令,使得燃机的工作状态更稳定,性能更优化。此外,通过soc芯片实时处理和反馈的优势,大大提高了燃机燃料调节阀控制的效率和精度。最重要的是,该方法还融合了神经网络和双闭环pid等先进控制算法,使得控制系统可以适应各种复杂的工况变化,提高了燃机的安全性和可靠性。因此,本发明对于提高燃机的运行性能具有重要的实用价值。
本文地址:https://www.jishuxx.com/zhuanli/20240726/127931.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表