视觉传感器辅助定位机构的制作方法
- 国知局
- 2024-07-30 13:47:02
本技术属于传感器辅助配件,具体涉及一种视觉传感器辅助定位机构。
背景技术:
1、公开号为cn114619490a,主题名称为一种基于视觉传感器的视觉伺服自动定位装置的发明专利申请,其ipc分类号为b25j19/04b25j19/00g01b11/00,其技术方案公开了“包括底柱箱、视觉传感器,所述底柱箱的外侧壁开设有通风散热口,所述底柱箱的内底面固定连接有电机,所述底柱箱的外侧面均匀固定连接有两个固定板,所述固定板的上下两端均开设有紧固口,所述底柱箱的上表面中心处开设有第一转动口,所述底柱箱的上表面中心处固定连接有底凸台。本发明,调节机构的设置,通过扳块、横凹块、卡接短轴等的共同协作,成功实现了对视觉传感器运动方向的快捷高效控制,极大的提高了视觉传感器的灵活性,使得视觉传感器接收的信息更加广泛、充分,极大的提高了视觉伺服自动定位的精确性,且结构设置精巧、实用,有利于操作、适于推广使用”。
2、然而,上述发明专利申请公开的技术方案,本质上是利用视觉传感器更好地实现自动定位功能,而不是用于满足视觉传感器自身的辅助定位需求。另一方面,视觉传感器自身的辅助定位需求,并非都需要极高的精度,除了可采用自动化控制机构提供高精度的解决方案外,还应当认识到存在有限精度的手动调节方案的需求。
技术实现思路
1、本实用新型针对现有技术的状况,克服以上缺陷,提供一种视觉传感器辅助定位机构。
2、本申请公开的视觉传感器辅助定位机构,其主要目的在于,不涉及高精度的自动化控制机构,而是在满足辅助定位需求的前提下,提供相应精度的手动调节解决方案。
3、本申请公开的视觉传感器辅助定位机构,其另一目的在于,提供多种途径的手动调节手段,实现相对高度、相对俯仰角度等辅助定位功能。
4、本实用新型采用以下技术方案,所述视觉传感器辅助定位机构用于暂存视觉传感器,包括:
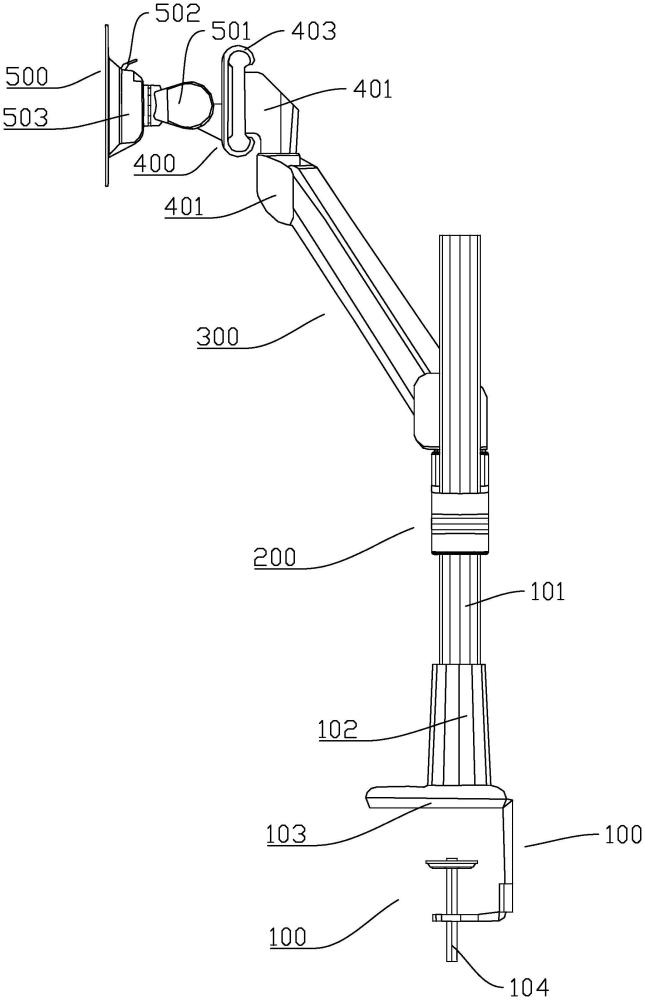
5、底座,所述底座包括定位柱;
6、手动高度调节结构,所述手动高度调节结构包括支撑板和调节钮,所述支撑板的一端套接于所述定位柱,所述调节钮用于调节所述支撑板与所述定位柱之间的张紧程度;
7、手动俯仰调节结构,所述手动俯仰调节结构包括第一连接座,所述支撑板的另一端固定连接于所述第一连接座,所述第一连接座内接有转轴,所述转轴与支撑臂的一端转动连接;
8、手动位移调节结构,所述手动位移调节结构包括第二连接座,所述第二连接座的一端与所述支撑臂的另一端固定连接,所述第二连接座的另一端与定位板固定连接,所述定位板套设有弧状卡板,所述弧状卡板卡接于所述定位板;
9、视觉传感器暂存结构,所述视觉传感器暂存结构包括第三连接座,所述第三连接座的一端与所述弧状卡板固定连接,所述第三连接座的另一端与定位架固定连接,所述定位架具有容纳槽,上述视觉传感器被容纳于所述容纳槽,所述定位片插接于所述容纳槽。
10、作为上述技术方案的进一步优选技术方案,所述定位架设有透明板。
11、作为上述技术方案的进一步优选技术方案,所述定位架设有位于两侧的翼片。
12、作为上述技术方案的进一步优选技术方案,所述底座还包括套筒,所述定位柱可伸缩地内接于所述套筒。
13、作为上述技术方案的进一步优选技术方案,所述底座还包括基底结构和外接柱,所述基底结构的一侧与所述套筒固定连接,所述基底结构的另一侧与所述外接柱活动连接。
14、本实用新型公开的视觉传感器辅助定位机构,其有益效果在于:
15、其一,不涉及高精度的自动化控制机构,而是在满足辅助定位需求的前提下,提供相应精度的手动调节解决方案。
16、其二,提供多种途径的手动调节手段,实现相对高度调节、相对俯仰角度调节等辅助定位功能。
技术特征:1.一种视觉传感器辅助定位机构,用于暂存视觉传感器,其特征在于,包括:
2.根据权利要求1所述的视觉传感器辅助定位机构,其特征在于,所述定位架设有透明板。
3.根据权利要求1所述的视觉传感器辅助定位机构,其特征在于,所述定位架设有位于两侧的翼片。
4.根据权利要求1所述的视觉传感器辅助定位机构,其特征在于,所述底座还包括套筒,所述定位柱可伸缩地内接于所述套筒。
5.根据权利要求4所述的视觉传感器辅助定位机构,其特征在于,所述底座还包括基底结构和外接柱,所述基底结构的一侧与所述套筒固定连接,所述基底结构的另一侧与所述外接柱活动连接。
技术总结本技术公开了一种视觉传感器辅助定位机构,用于暂存视觉传感器,包括底座和手动高度调节结构,所述底座包括定位柱,所述手动高度调节结构包括支撑板和调节钮,所述支撑板的一端套接于所述定位柱,所述调节钮用于调节所述支撑板与所述定位柱之间的张紧程度。本技术公开的视觉传感器辅助定位机构,其有益效果在于:其一,不涉及高精度的自动化控制机构,而是在满足辅助定位需求的前提下,提供相应精度的手动调节解决方案。其二,提供多种途径的手动调节手段,实现相对高度调节、相对俯仰角度调节等辅助定位功能。技术研发人员:袁宝玺,谢函霏受保护的技术使用者:苏州视域科技有限公司技术研发日:20231031技术公布日:2024/7/25本文地址:https://www.jishuxx.com/zhuanli/20240729/164554.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种紧固装置的制作方法
下一篇
返回列表