一种基于BIM的室内爬壁机器人路径规划方法
- 国知局
- 2024-07-30 09:22:35
本发明涉及bim与路径规划,具体涉及一种基于bim的室内爬壁机器人路径规划方法。
背景技术:
1、爬壁机器人是一种专门设计的机器人系统,可以在垂直或倾斜的表面上移动,如墙壁和玻璃窗,且小型爬壁机器人可以进入传统无人地面车辆(unmanned groundvehicles,ugvs)无法进入的室内区域,小型爬壁机器人作为传统室内机器人的有益补充,在室内狭小区域环境下的自动化检测、监测管理等方面具有重要的应用前景。
2、与传统ugvs相比,爬壁机器人有效载荷和机载计算能力较低,且为实现在倾斜表面运动,往往消耗更多的功率。此外,爬壁机器人安全运行易受到建筑构件影响(如窗户),易产生坠落风险。因此,规划一条准确且合理的路径对于确保机器人能够安全高效地导航是有待解决的关键技术问题。为实现室内路径规划,机器人需要预先获取周围环境,并且爬壁机器人需要包含几何和语义信息的室内导航地图。而当前方法主要通过车载传感器构建室内地图,但需要保证处理能力具有较高的计算能力,而传统的传感器无法去识别影响路径规划结果相关因素,例如,激光雷达传感器无法识别室内场景的玻璃或反射金属,这提升了室内爬壁机器人的损坏风险。
3、在建筑、工程和施工(aec)行业,建筑信息建模(building informationmodeling,bim)用于表示建筑几何和语义等全生命周期的数字化表示,并以国际标准工业基础类别(industry foundation classes,ifc)作为bim常见交换标准。bim模型的几何和语义丰富性为爬壁机器人的周围环境提供了详实的信息来源,极大降低了机器人的计算负担,这对于先验环境下室内爬壁机器人常态化检测具有潜在巨大的应用价值。
4、当前,基于bim模型实现室内爬壁机器人路径规划包括三项主要任务:1)识别特定路径规划所需的关键建筑信息,并根据信息要求调整bim模型;2)将bim模型转化为路径规划模型,为路径规划奠定计算基础;3)执行路径规划算法以找到最优路径。已有研究应用bim模型来支持无人机和地面机器人的路径规划,包括行人、应急响应人员和无人机(unmanned aerial vehicles,uavs)等。然而,爬壁机器人具有不同的运动模式和路线偏好,而已有方法主要面向ugvs和uavs等常见机器人,通过获取bim模型建筑构件几何和类型特征实现室内路径规划和导航,并未考虑到构件表面语义特征,无法适用于爬壁机器人室内路径规划。此外,爬壁机器人除了能够在倾斜表面上移动外,还可能具有在两个相交表面之间转移的能力(如图1所示),而当前可用的路径规划算法中没有考虑上述因素,限制了室内爬壁机器人在bim室内环境的路径规划以及后续导航应用能力。因此,需要一种基于bim的室内爬壁机器人路径规划方法,以解决上述问题。
技术实现思路
1、本发明的目的在于提供一种基于bim的室内爬壁机器人路径规划方法,以解决上述背景技术中提出的现有技术中存在的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种基于bim的室内爬壁机器人路径规划方法,包括如下步骤:
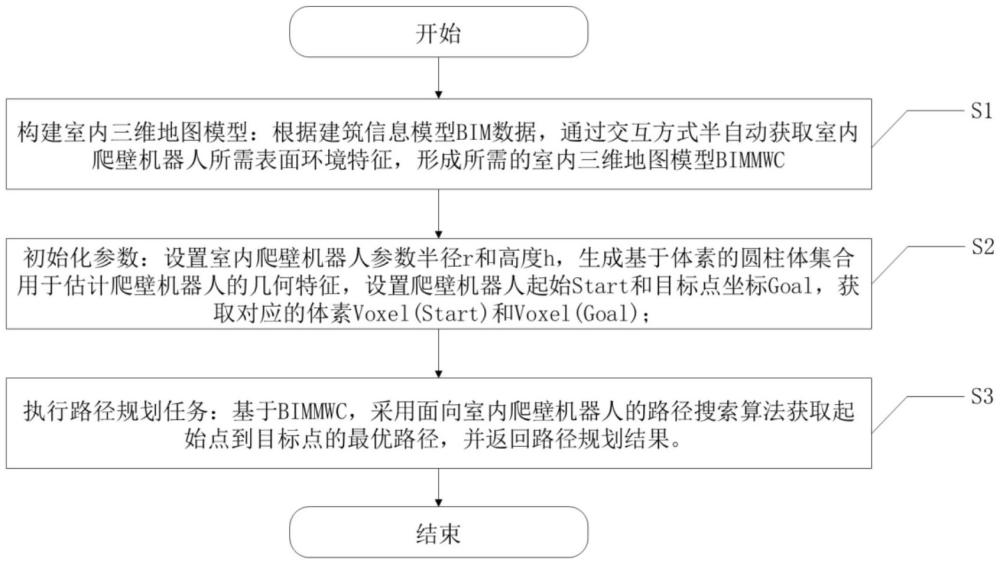
4、s1:构建室内三维地图模型:根据建筑信息模型bim数据,通过交互方式半自动获取室内爬壁机器人所需表面环境特征,形成所需的室内三维地图模型bimmwc;
5、s2:初始化参数:设置室内爬壁机器人参数半径r和高度h,生成基于体素的圆柱体集合用于估计爬壁机器人的几何特征,设置爬壁机器人起始start和目标点坐标goal,获取对应的体素voxel(start)和voxel(goal);
6、s3:执行路径规划任务:基于bimmwc,采用面向室内爬壁机器人的路径搜索算法获取起始点到目标点的最优路径,并返回路径规划结果。
7、优选的,所述s1的具体步骤为:
8、s1.1:首先利用开源解析库读取bim数据转换为三维模型,对每个墙和楼板平面上建立单独的表面坐标系,分为楼板水平面和墙体非水平面两者坐标系的建立;
9、s1.2:针对每个墙或楼板对应表面坐标系,沿正z轴方向的特定高度范围maxheight内进行体素化,x轴、y轴和z轴方向上的体素数量通过公式1计算:
10、
11、其中,nx、ny和nz分别表示x轴、y轴和z轴方向上的体素数量,返回一个值的最大整数;resolution表示体素的长度和宽度,height表示体素高度,当resolution=height表示体素类型为立方体体素;
12、采用三维矩阵存储每个表面对应的体素,采用索引坐标(r,c,h)表示每个体素对应位置:r表示沿x轴的位置,c表示沿y轴的位置,h表示沿z轴的位置,对于任何表面坐标s(xs,ys,zs),其对应体素的索引值通过公式2计算,索引坐标(r,c,h)和voxel的中心点坐标centers(xcs,ycs,zcs)通过公式3表示:
13、
14、
15、其中,返回值的最小整数;
16、s1.3:通过体素与其他构件的空间关系确定语义特征,该过程主要利用体素与bim模型构件求交运算判断是否存在空间关系,如相交、相离、相切或包含关系,并赋予体素对应的特征信息。
17、优选的,所述s2的具体步骤为:
18、为了避免机器人与障碍物之间的碰撞,定义爬壁机器人可以被半径为r、高度为h的圆柱体包围,爬壁机器人的几何形状由公式4表示:
19、geometry={(x,y,z);(x-xs)2+(y-ys)2≤r2,0≤z≤h} (4)
20、其中,(xs,ys,zs)表示爬壁机器人的中心点,并且(x,y,z)表示爬壁机器人的任何其它点;
21、根据公式4可形成基于体素的圆柱体,根据中心点使用voxel(rs,cs,0)来表示与中心(xs,ys,zs)相对应的体素,并使用voxel(r,c,h)来表示对应于机器人的其他点的体素,每个voxel(r,c,h)相对于中心体素voxel(rs,cs,0)的偏移集由res表示,其满足以下表达式:
22、
23、综上,在路径搜索过程中,基于当前voxel(rc,cc,hc)和相对偏移量res,可得到表示机器人占用的voxel的一组坐标集合{(rc+resx,cc+resy,hc+resz)},进而获取当前爬壁机器人所占用voxel。
24、优选的,所述s3的具体步骤为:
25、s3.1:计算voxel(start)评价函数,并将voxel(start)加入到优先队列,其中,优先队列按照每个体素评价函数升序排列;
26、s3.2:判断当前优先队列是否为空,优先队列为空终止运行,否则继续下一步;
27、s3.3:从优先队列弹出第一个体素voxel,判断当前体素voxel是否等于voxel(goal),两者相等终止运行执行s3.7,否则执行步骤s3.4;
28、s3.4:获取当前体素相邻八方向体素集合;
29、s3.5:循环遍历adjvoxelset每个体素adjvoxel执行以下过程:
30、s3.5.1:根据当前体素adjvoxel按照跨越策略生成基于体素的圆柱体体素集合cylindervoxelset;
31、s3.5.2:判断cylindervoxelset是否存在可跨导航体素或可跨不可导航体素,若存在,则执行跨越策略并运行步骤s3.5.4,若不存在,则执行步骤s3.5.3;
32、s3.5.3:判断cylindervoxelset是否存在不可导航体素,若存在,则跳过步骤s3.5.4,否则,执行步骤s3.5.4;
33、s3.5.4:计算当前体素voxel评价函数,若当前voxel评价函数小于已有评价函数,则记录体素voxel与adjvoxel关联关系,并插入到优先队列中;
34、s3.6:执行s3.2;
35、s3.7:返回路径规划结果:判断是否存在voxel(goal)关联关系,若存在,则得到voxel(goal)关联体素和依次关联的体素序列体素,直至得到voxel(start),通过对体素中心点连线得到当前路径结果,若不存在,则不存在最优路径。
36、优选的,所述s1.1的具体步骤为:
37、s1.1.1:对于水平平面,即楼板平面,z坐标值是相同的,使用最小包围盒mbb(x,y),xmin≤x≤xmax,ymin≤y≤ymax来表示其平面范围,然后使用og(xmin,ymin,z)作为原点创建坐标系;
38、s1.1.2:对于非水平面,即墙平面,通过点击交互方式获取内表面相关的点p和法向量normal,墙上坐标点和p点形成向量与normal存在垂直关系,根据该策略可得到墙平面的四个顶点的坐标:p1(x1,y1,z1),p2(x2,y2,z2),p3(x3,y3,z3)和p4(x4,y4,z4),然后,将四个顶点中具有z坐标值最大的两个顶点p3和p4投影到最小z坐标值(p1和p2)定义直线,得到点p3'和p4',最后,从p1、p2、p3'和p4'中选择x、y和z坐标值最小的点作为原点,并用og(xmin,ymin,zmin)表示原点,使用og作为原点和p3'创建右手笛卡尔坐标系p4'作为正x方向。
39、优选的,所述s1.3的具体步骤为:
40、判断条件包含两种类型:
41、针对贴合墙壁体素,该体素与其他表面的建筑构件存在相切情况,则该体素定义为可跨导航体素,若存在相交、包含等情况则该体素定义为可跨不可导航体素;
42、针对非贴合墙壁体素,该体素与其他建筑构件存在包含、相交关系设置为不可导航体素,否则设置为可导航体素。
43、优选的,所述s3.1中评价函数f(voxel)由权重函数g(voxel)和启发式函数h(voxel)组成,g(voxel)表示从voxel(start)到当前voxel距离之和,启发式函数h(voxel)表示当前voxel到voxel(goal)的估计距离,采用切比雪夫距离表示。
44、优选的,执行所述s3.5.2中爬壁机器人跨越策略的条件是当爬壁机器人占据可跨导航或可跨不可导航体素时,触发该策略。
45、与现有技术相比,本发明的有益效果是:
46、1、本发明基于bim模型构建了一种适用于室内爬壁机器人的三维地图模型bimmwc,利用体素化方式表达室内场景,考虑了bim构件语义、爬壁机器人几何特征和跨墙体特性,提升了其室内路径规划的有效性和合理性,可为后续导航、自动化监测等业务化应用提供技术支撑。
47、2、本发明针对室内路径规划方法,在路径搜索过程中引入体素化圆柱体表示爬壁机器人几何特征,采用跨越策略实现爬壁机器人跨越能力,最终得到了一种适用于bimmwc室内爬壁机器人路径规划算法,为室内爬壁机器人的路径规划和导航提供技术参考,有助于实现室内自动化监测和管理等应用。
本文地址:https://www.jishuxx.com/zhuanli/20240730/149252.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表