基于飞行动态规划的无人机清除杆塔鸟窝的方法及装置与流程
- 国知局
- 2024-07-31 23:28:14
本发明涉及电力巡检,具体而言,涉及一种基于飞行动态规划的无人机清除杆塔鸟窝的方法及装置。
背景技术:
1、随着电力系统的不断发展和扩展,电力输电线路的巡检和维护变得日益重要。为了应对这一挑战,近年来逐渐引入了无人机技术用于电力巡检,以提高效率、降低成本、减少安全风险。然而,在无人机应用于电力巡检的过程中,仍然存在着一些问题,其中之一是电力输电线路上鸟窝的清理。鸟窝是由鸟类在电力杆塔或输电线路上筑巢而形成的,会影响线路的正常运行和安全性。目前,清除鸟窝的常见做法是利用无人机搭载机械臂进行作业,但是现有的无人机清除鸟窝的方法存在一些局限性,首先现有的清理方法通常需要人工干预,缺乏自动化的规划和执行能力,使得作业效率低下,成本较高;其次,现有的无人机清理鸟窝的方式只进行一次抓取,难以彻底清理,可能导致残留物的产生,增加线路的安全隐患。
2、基于现有技术的缺点,现亟需一种基于飞行动态规划的无人机清除杆塔鸟窝的方法及装置。
技术实现思路
1、本发明的目的在于提供一种基于飞行动态规划的无人机清除杆塔鸟窝的方法及装置,以改善上述问题。为了实现上述目的,本发明采取的技术方案如下:
2、第一方面,本申请提供了一种基于飞行动态规划的无人机清除杆塔鸟窝的方法,包括:
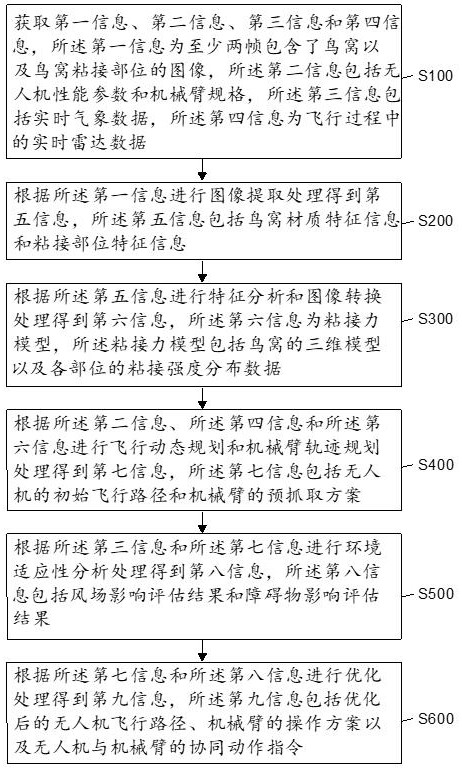
3、获取第一信息、第二信息、第三信息和第四信息,所述第一信息为至少两帧包含了鸟窝以及鸟窝粘接部位的图像,所述第二信息包括无人机性能参数和机械臂规格,所述第三信息包括实时气象数据,所述第四信息为飞行过程中的实时雷达数据;
4、根据所述第一信息进行图像提取处理得到第五信息,所述第五信息包括鸟窝材质特征信息和粘接部位特征信息;
5、根据所述第五信息进行特征分析和图像转换处理得到第六信息,所述第六信息为粘接力模型,所述粘接力模型包括鸟窝的三维模型以及各部位的粘接强度分布数据;
6、根据所述第二信息、所述第四信息和所述第六信息进行飞行动态规划和机械臂轨迹规划处理得到第七信息,所述第七信息包括无人机的初始飞行路径和机械臂的预抓取方案;
7、根据所述第三信息和所述第七信息进行环境适应性分析处理得到第八信息,所述第八信息包括风场影响评估结果和障碍物影响评估结果;
8、根据所述第七信息和所述第八信息进行优化处理得到第九信息,所述第九信息包括优化后的无人机飞行路径、机械臂的操作方案以及无人机与机械臂的协同动作指令。
9、第二方面,本申请还提供了基于飞行动态规划的无人机清除杆塔鸟窝的装置,包括:
10、获取模块,用于获取第一信息、第二信息、第三信息和第四信息,所述第一信息为至少两帧包含了鸟窝以及鸟窝粘接部位的图像,所述第二信息包括无人机性能参数和机械臂规格,所述第三信息包括实时气象数据,所述第四信息为飞行过程中的实时雷达数据;
11、提取模块,用于根据所述第一信息进行图像提取处理得到第五信息,所述第五信息包括鸟窝材质特征信息和粘接部位特征信息;
12、转换模块,用于根据所述第五信息进行特征分析和图像转换处理得到第六信息,所述第六信息为粘接力模型,所述粘接力模型包括鸟窝的三维模型以及各部位的粘接强度分布数据;
13、规划模块,用于根据所述第二信息、所述第四信息和所述第六信息进行飞行动态规划和机械臂轨迹规划处理得到第七信息,所述第七信息包括无人机的初始飞行路径和机械臂的预抓取方案;
14、评估模块,用于根据所述第三信息和所述第七信息进行环境适应性分析处理得到第八信息,所述第八信息包括风场影响评估结果和障碍物影响评估结果;
15、优化模块,用于根据所述第七信息和所述第八信息进行优化处理得到第九信息,所述第九信息包括优化后的无人机飞行路径、机械臂的操作方案以及无人机与机械臂的协同动作指令。
16、本发明的有益效果为:
17、本发明利用图像处理技术,能够自动识别电力杆塔上的鸟窝,并根据图像提取处理得到的信息,智能地规划无人机的飞行路径和机械臂的操作方案。本发明根据粘接力模型和环境适应性分析,采用多次抓取的策略,有效地解决了一次抓取无法完全清理的问题,提升了杆塔清洁的效果。本发明通过利用模拟退火算法进行优化处理,调整无人机的飞行路径以最大程度减少风险并提高飞行效率,从而确保清除过程的安全性和高效性。
18、本发明的其他特征和优点将在随后的说明书阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明实施例了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
技术特征:1.一种基于飞行动态规划的无人机清除杆塔鸟窝的方法,其特征在于,包括:
2.根据权利要求1所述的基于飞行动态规划的无人机清除杆塔鸟窝的方法,其特征在于,根据所述第一信息进行图像提取处理得到第五信息,包括:
3.根据权利要求1所述的基于飞行动态规划的无人机清除杆塔鸟窝的方法,其特征在于,根据所述第五信息进行特征分析和图像转换处理得到第六信息,包括:
4.根据权利要求1所述的基于飞行动态规划的无人机清除杆塔鸟窝的方法,其特征在于,根据所述第二信息、所述第四信息和所述第六信息进行飞行动态规划和机械臂轨迹规划处理得到第七信息,包括:
5.根据权利要求1所述的基于飞行动态规划的无人机清除杆塔鸟窝的方法,其特征在于,根据所述第三信息进行环境适应性分析处理得到第八信息,包括:
6.一种基于飞行动态规划的无人机清除杆塔鸟窝的装置,其特征在于,包括:
7.根据权利要求6所述的基于飞行动态规划的无人机清除杆塔鸟窝的装置,其特征在于,所述提取模块包括:
8.根据权利要求6所述的基于飞行动态规划的无人机清除杆塔鸟窝的装置,其特征在于,所述转换模块包括:
9.根据权利要求6所述的基于飞行动态规划的无人机清除杆塔鸟窝的装置,其特征在于,所述规划模块包括:
10.根据权利要求6所述的基于飞行动态规划的无人机清除杆塔鸟窝的装置,其特征在于,所述评估模块包括:
技术总结本发明提供了一种基于飞行动态规划的无人机清除杆塔鸟窝的方法及装置,涉及电力巡检技术领域,包括:获取第一信息、第二信息、第三信息和第四信息;根据第一信息进行图像提取处理得到第五信息;根据第五信息进行特征分析和图像转换处理得到第六信息;根据第二信息、第四信息和第六信息进行飞行动态规划和机械臂轨迹规划处理得到第七信息,包括无人机的初始飞行路径和机械臂的预抓取方案;根据第三信息和第七信息进行环境适应性分析处理得到第八信息;根据第七信息和第八信息进行优化处理得到第九信息。本发明利用图像处理技术,能够自动识别电力杆塔上的鸟窝,并根据图像提取处理得到的信息,智能地规划无人机的飞行路径和机械臂的操作方案。技术研发人员:赵旭伟,张玉,安东宁,王丁丁,王啟凤,谷敏受保护的技术使用者:石家庄思凯电力建设有限公司技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240730/197746.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。