机器人路径规划的方法、连接桥的设置方法及相关产品与流程
- 国知局
- 2024-07-31 23:56:14
本技术涉及机器人,特别涉及机器人路径规划的方法、连接桥的设置方法及相关产品。
背景技术:
1、随着太阳能源的大力发展,光伏电站在全世界蓬勃发展,而光伏清扫机器人可以为光伏电站的运维清洁带来极大的便利。现有的光伏清扫机器人在清扫作业中存在诸多挑战,在机器人感知、定位、导航、路径规划、场景适应能力等方面面临诸多问题。导轨式光伏清扫机器人只能沿光伏组件的边框行走,导航方式简单、适应能力弱、应用范围小。具备自动定位导航能力的光伏清扫机器人能够在光伏面板表面行走并自动执行清扫任务,且能自动进行路径规划,有效生成清扫路径轨迹。
2、在实际的光伏电站,尤其是分布式屋顶光伏电站中,通常包含了多组光伏组件。光伏组件分布分散、排布不规则,且屋顶不平也令光伏组件的铺设存在一定倾角。面对如此复杂的场景,光伏清扫机器人在进行路径规划时,需要解决光伏组件范围大、不平整、不连续、形状复杂等诸多问题,现有方法还不能很好地解决。因此,亟需一种方法来解决复杂场景下的光伏清扫机器人路径规划问题,以针对光伏电站设计准确、全覆盖的运行路径。
技术实现思路
1、基于上述问题,本技术提供了机器人路径规划的方法、连接桥的设置方法及相关产品,以解决复杂场景下的光伏清扫机器人路径规划问题,从而针对光伏电站设计准确、全覆盖的运行路径。
2、本技术公开了一种机器人路径规划的方法,所述方法包括:
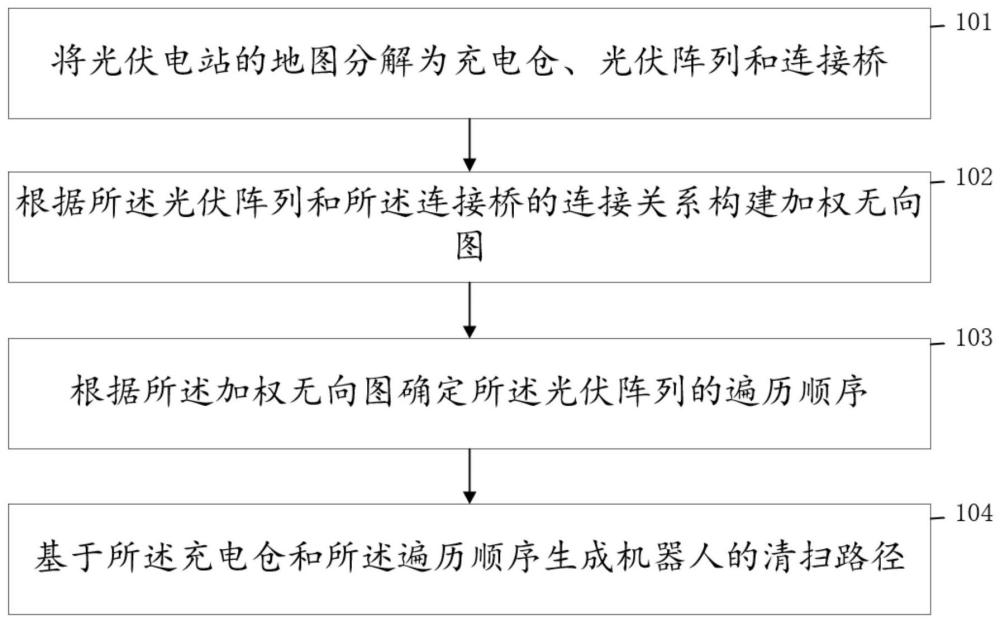
3、将光伏电站的地图分解为充电仓、光伏阵列和连接桥;
4、根据所述光伏阵列和所述连接桥的连接关系构建加权无向图;
5、根据所述加权无向图确定所述光伏阵列的遍历顺序;
6、基于所述充电仓和所述遍历顺序生成机器人的清扫路径。
7、可选的,所述根据所述光伏阵列和所述连接桥的连接关系构建加权无向图,包括:
8、确定所述地图中的第一连接桥;
9、确定所述第一连接桥的两端点连接的两个光伏阵列;
10、将所述两个光伏阵列作为两个顶点,并通过边连接;
11、将所述两个光伏阵列之间的质心距离作为所述两个顶点之间的权重,并标注在所述边上,得到所述加权无向图。
12、可选的,所述基于所述充电仓和所述遍历顺序生成机器人的清扫路径,包括:
13、根据所述充电仓和所述光伏阵列的位置,获取出仓路径;
14、根据所述遍历顺序获取过桥路径;
15、根据出仓路径或者过桥路径在所述光伏阵列上确定区域清扫起点,生成区域清扫路径;
16、根据所述遍历顺序构建栅格地图,将每个所述光伏阵列上的区域清扫路径连接得到所述清扫路径。
17、可选的,所述根据所述充电仓和所述光伏阵列的位置,获取出仓路径,包括:
18、根据所述充电仓和所述光伏阵列的相对位置,确定所述充电仓所在的第一光伏阵列;
19、确定所述第一光伏阵列与所述充电仓相交的第一边;
20、获取平行于所述机器人的出仓方向上,经过所述充电仓的几何中心点的直线与所述第一边的第一交点;
21、连接所述充电仓的几何中心点与所述第一交点,并延长连接线得到位于所述第一光伏阵列的出仓点;
22、获取经过所述充电仓的几何中心点、所述第一交点和所述出仓点的路径,作为所述出仓路径。
23、可选的,所述根据所述遍历顺序获取过桥路径,包括:
24、根据所述遍历顺序确定第二光伏阵列和第三光伏阵列,以及所述第二光伏阵列和所述第三光伏阵列之间的第二连接桥;
25、确定所述第二连接桥与所述第二光伏阵列相交的第二边;
26、确定所述第二连接桥与所述第三光伏阵列相交的第三边;
27、获取平行于所述机器人的过桥方向上,经过所述第二连接桥的几何中心点的直线与所述第二边的第一交点;
28、获取平行于所述机器人的过桥方向上,经过所述第二连接桥的几何中心点的直线与所述第三边的第二交点;
29、分别将所述第二连接桥的几何中心点与所述第一交点和所述第二交点连接,并延长连接线,得到位于所述第二光伏阵列的第一过桥点,所述第三光伏阵列的第二过桥点;
30、获取经过所述第一过桥点、所述第一交点、所述第二连接桥的几何中心点、第二交点以及所述第二过桥点的路径,作为所述过桥路径。
31、可选的,所述根据出仓路径或者过桥路径在所述光伏阵列上确定区域清扫起点,包括:
32、当所述光伏阵列与所述充电仓相邻时,确定所述区域清扫起点为距离所述出仓路径的起点最近的光伏阵列几何特征点;所述光伏阵列几何特征点包括四边形的所述光伏阵列的四个顶点;
33、当所述光伏阵列与所述充电仓不相邻时,确定所述区域清扫起点为距离所述过桥路径的起点最近的光伏阵列几何特征点。
34、可选的,所述地图还包括和禁行区域,所述禁行区域存在于所述光伏阵列中,所述生成区域清扫路径,包括:
35、获取所述光伏阵列中不包含所述禁行区域的区块;
36、基于所述区域清扫起点,通过牛耕法在所述区块上生成所述区域清扫路径。
37、可选的,所述根据所述遍历顺序构建栅格地图,将每个所述光伏阵列上的区域清扫路径连接得到所述清扫路径,包括:
38、在所述栅格地图中,获取第四光伏阵列的第一区域清扫路径;
39、根据所述遍历顺序,获取所述机器人清扫所述第四光伏阵列后经过的第三连接桥;
40、将所述第一区域清扫路径的终点作为第一点,将与所述第三连接桥对应的过桥路径的起点作为第二点;
41、通过a*算法规划从所述第一点到所述第二点的跨阵列路径;
42、按照所述遍历顺序,将光伏电站中的每个区域清扫路径和每个跨阵列路径串联,得到所述清扫路径。
43、基于上述一种机器人路径规划的方法,本技术还公开了一种机器人路径规划的装置,包括:地图分解单元、无向图构建单元、遍历顺序确定单元和清扫路径生成单元;
44、所述地图分解单元,用于将光伏电站的地图分解为充电仓、光伏阵列和连接桥;
45、所述无向图构建单元,用于根据所述光伏阵列和所述连接桥的连接关系构建加权无向图;
46、所述遍历顺序确定单元,用于根据所述加权无向图确定所述光伏阵列的遍历顺序;
47、所述清扫路径生成单元,用于基于所述充电仓和所述遍历顺序生成机器人的清扫路径。
48、可选的,所述无向图构建单元,包括:
49、第一连接桥确定子单元,用于确定所述地图中的第一连接桥;
50、阵列确定子单元,用于确定所述第一连接桥的两端点连接的两个光伏阵列;
51、连接子单元,用于将所述两个光伏阵列作为两个顶点,并通过边连接;
52、加权无向图获取子单元,用于将所述两个光伏阵列之间的质心距离作为所述两个顶点之间的权重,并标注在所述边上,得到所述加权无向图。
53、可选的,所述清扫路径生成单元,包括:
54、出仓路径获取子单元,用于根据所述充电仓和所述光伏阵列的位置,获取出仓路径;
55、过桥路径获取子单元,用于根据所述遍历顺序获取过桥路径;
56、区域清扫路径生成子单元,用于根据出仓路径或者过桥路径在所述光伏阵列上确定区域清扫起点,生成区域清扫路径;
57、清扫路径获取子单元,用于根据所述遍历顺序构建栅格地图,将每个所述光伏阵列上的区域清扫路径连接得到所述清扫路径。
58、可选的,所述出仓路径获取子单元,包括:
59、第一光伏阵列确定子单元,用于根据所述充电仓和所述光伏阵列的相对位置,确定所述充电仓所在的第一光伏阵列;
60、第一边确定子单元,用于确定所述第一光伏阵列与所述充电仓相交的第一边;
61、第一交点确定子单元,用于获取平行于所述机器人的出仓方向上,经过所述充电仓的几何中心点的直线与所述第一边的第一交点;
62、出仓点获取子单元,用于连接所述充电仓的几何中心点与所述第一交点,并延长连接线得到位于所述第一光伏阵列的出仓点;
63、出仓路径确定子单元,用于获取经过所述充电仓的几何中心点、所述第一交点和所述出仓点的路径,作为所述出仓路径。
64、可选的,所述过桥路径获取子单元,包括:
65、第二连接桥确定子单元,用于根据所述遍历顺序确定第二光伏阵列和第三光伏阵列,以及所述第二光伏阵列和所述第三光伏阵列之间的第二连接桥;
66、第二边确定子单元,用于确定所述第二连接桥与所述第二光伏阵列相交的第二边;
67、第三边确定子单元,用于确定所述第二连接桥与所述第三光伏阵列相交的第三边;
68、第一交点获取子单元,用于获取平行于所述机器人的过桥方向上,经过所述第二连接桥的几何中心点的直线与所述第二边的第一交点;
69、第二交点获取子单元,用于获取平行于所述机器人的过桥方向上,经过所述第二连接桥的几何中心点的直线与所述第三边的第二交点;
70、第二过桥点获取子单元,用于分别将所述第二连接桥的几何中心点与所述第一交点和所述第二交点连接,并延长连接线,得到位于所述第二光伏阵列的第一过桥点,所述第三光伏阵列的第二过桥点;
71、过桥路径确定子单元,用于获取经过所述第一过桥点、所述第一交点、所述第二连接桥的几何中心点、第二交点以及所述第二过桥点的路径,作为所述过桥路径。
72、可选的,所述区域清扫路径生成子单元,包括:
73、第一几何特征点获取子单元,用于当所述光伏阵列与所述充电仓相邻时,确定所述区域清扫起点为距离所述出仓路径的起点最近的光伏阵列几何特征点;所述光伏阵列几何特征点包括四边形的所述光伏阵列的四个顶点;
74、第二几何特征点获取子单元,用于当所述光伏阵列与所述充电仓不相邻时,确定所述区域清扫起点为距离所述过桥路径的起点最近的光伏阵列几何特征点。
75、可选的,所述地图还包括和禁行区域,所述禁行区域存在于所述光伏阵列中,所述区域清扫路径生成子单元,包括:
76、区块获取子单元,用于获取所述光伏阵列中不包含所述禁行区域的区块;
77、牛耕法子单元,用于基于所述区域清扫起点,通过牛耕法在所述区块上生成所述区域清扫路径。
78、可选的,所述清扫路径获取子单元,包括:
79、第一路径获取子单元,用于在所述栅格地图中,获取第四光伏阵列的第一区域清扫路径;
80、第三连接桥获取子单元,用于根据所述遍历顺序,获取所述机器人清扫所述第四光伏阵列后经过的第三连接桥;
81、起点获取子单元,用于将所述第一区域清扫路径的终点作为第一点,将与所述第三连接桥对应的过桥路径的起点作为第二点;
82、a*算法子单元,用于通过a*算法规划从所述第一点到所述第二点的跨阵列路径;
83、串联子单元,用于按照所述遍历顺序,将光伏电站中的每个区域清扫路径和每个跨阵列路径串联,得到所述清扫路径。
84、基于上述一种机器人路径规划的方法,本技术还公开了一种光伏电站中连接桥的设置方法,所述连接桥设置于光伏电站的至少两个光伏阵列之间,所述设置方法包括:
85、根据各光伏阵列的位置生成多个连接桥的设置方案;
86、分别针对每个所述设置方案,利用上述的方法生成机器人的清扫路径;
87、将各所述清扫路径中效费比最高的清扫路径作为最优清扫路径;
88、将所述最优清扫路径对应的所述设置方案作为目标设置方案,以根据所述目标设置方案设置各所述连接桥。
89、基于上述一种机器人路径规划的方法,本技术还公开了一种电子设备,包括:存储器和处理器,所述存储器存储有程序指令,所述处理器从所处存储器调取所述程序指令,以执行上述一种机器人路径规划的方法。
90、基于上述一种机器人路径规划的方法,本技术还公开了一种计算机可读的存储介质,其上存储有程序文件,所述程序文件能够被执行以实现上述一种机器人路径规划的方法。
91、本技术公开了机器人路径规划的方法、连接桥的设置方法及相关产品。根据将光伏电站的地图分解为充电仓、光伏阵列、连接桥和禁行区域,根据光伏阵列和连接桥的连接关系构建加权无向图,并确定光伏阵列的遍历顺序。基于充电仓、禁行区域和遍历顺序生成机器人的清扫路径。对光伏电站中多阵列、不连续、复杂形状的光伏阵列及连接桥进行地图分解、无向图构建,来确定各光伏阵列的清扫顺序,以依次遍历光伏阵列,并基于地图内容和遍历光伏阵列的顺序有针对性地生成清扫路径,过程简单而有效。解决了复杂场景下的路径规划问题,以针对光伏电站设计准确、全覆盖的运行路径。也为清扫机器人进行现场无人值守的清扫作业提供了技术基础。
本文地址:https://www.jishuxx.com/zhuanli/20240730/199264.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。