移栽机自动避障控制方法
- 国知局
- 2024-07-31 23:56:40
本发明属于农机导航,涉及一种移栽机自动避障控制方法,具体的说是涉及一种能够改善农机动态建模、提高动态计算精度的移栽机自动避障控制方法。
背景技术:
1、随着农业机械化水平的不断提升,农业机械导航控制技术逐渐发展成为农业机械领域的研究热点之一。导航控制技术可以有效提高农业机械作业的精度和效率,降低人工操作的繁琐程度。而不同的控制算法可以实现对农业机械作业的精确控制。目前,常用的控制算法包括pid控制算法、模糊控制算法、神经网络控制算法等,但是,这些算法还普遍存在一些共性问题,如模型精度不足、计算复杂度高和容错性不足。这就降低了农机动态建模和计算精度,无法确保无人化移栽机在工作时的精确避障,无人化操作的稳定性与安全性有待进一步提高。
技术实现思路
1、本发明的目的在于针对现有无人化移栽机控制算法中存在的不足,提出一种移栽机自动避障控制方法,通过采用双目视觉传感器测量得到移栽机当前时刻的位置、移动速度、障碍物等信息;采用基于odg-mpc算法,计算当前移栽机向量的状态x,加速度向量u,得到移栽机状态模型接着通过odg算法推算移栽机前方障碍物的类型;最后结合odg-mpc算法,通过将odg、目标路径的跟踪和输入控制组成的控制方法,实现移栽机自动避障,进一步提高无人化移栽机工作时的稳定性和安全性。
2、本技术提供的移栽机自动避障控制方法采用如下技术方案:
3、移栽机自动避障控制方法,其特征在于,包括如下步骤:
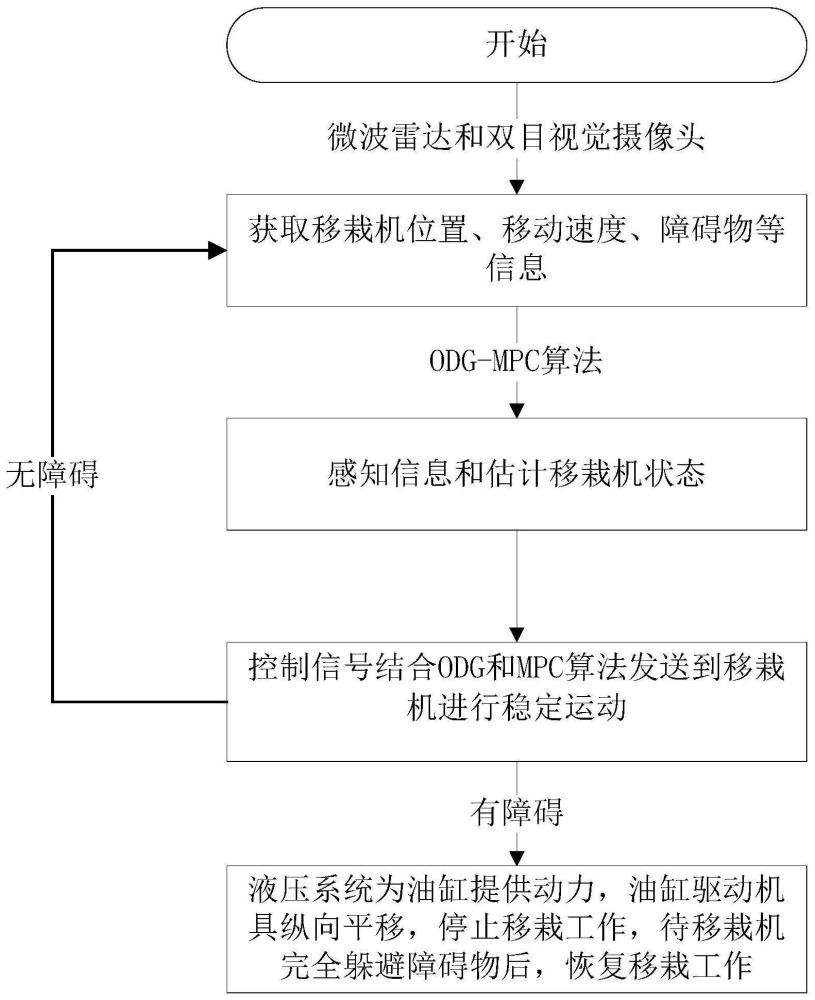
4、(1)通过双目视觉摄像头获取移栽机位置、移动速度、障碍物等信息;
5、(2)控制信号通过odg-mpc算法的感知信息和移栽机状态的估计,通过结合odg和mpc算法发送到移栽机进行稳定运动;
6、(3)控制信号将指令发送到换向阀开关,液压系统收到指令后,液压缸开始工作,有移栽机的液压系统为油缸提供动力,油缸驱动机具纵向平移,停止移栽工作,待移栽机完全躲避障碍物后,恢复移栽工作。
7、通过采用上述技术方案,可解决无人化移栽机的自动避障问题,提高无人化移栽机工作时的稳定性和安全性。
8、进一步的,所述双目视觉摄像头获取移栽机位置、移动速度、障碍物等信息,是通过计算当前移栽机状态模型的得到的。
9、通过采用上述技术方案,以方便获取移栽机和障碍物的信息,提高信息获取和障碍物识别的效率与准确性。
10、进一步的,所述移栽机状态模型是通过计算当前移栽机向量的状态x,加速度向量u得到,具体方法为:
11、当前移栽机状态模型是通过下述公式计算得到:
12、
13、x=[px,vx,py,vy]t,u=[ax,ay]t
14、其中x是移栽机向量的状态,u是加速度向量,受控系统通常基于mpc的离散状态空间模型进行建模,由于移栽机模型必须预测下一步的物理经度,因此将连续时间模型转换为采样时间为ts的离散时间模型,移栽机运行点的动态离散时间模型可以描述为状态空间,移栽机运行点的形状可以线性化如下:
15、x(k+1)=adx(k)+bdu(k)
16、y(k)=cdx(k)
17、
18、y(k)=[px,py]t
19、其中ad是系统矩阵,bd是输入矩阵,cd是输出矩阵,x(k)表示第k
20、个移栽机状态,y(k)表示经纬度位置。
21、通过采用上述技术方案,实现了移栽机下一步的运动模型计算,提高了计算性能和计算实时性。
22、进一步的,所述控制信号通过odg-mpc算法的感知信息和移栽机状态的估计,通过结合odg和mpc算法发送到移栽机进行稳定运动,是基于odg算法推算移栽机前方障碍物类型的过程得到的:
23、
24、
25、
26、其中,ov是前方障碍物的平均odg,py是移栽机前方道路的横向位置,ω是障碍物位置的风险程度,ta是回避所需的时间,tc撞到障碍物的时间,是前方障碍物的横向位置,σ是前方障碍物移动的方差,ws是前方障碍物的宽度,是前方障碍物的移动速度,和分别是移栽机的纵向位置和速度,和分别是前方障碍物的纵向位置和速度。
27、通过采用上述技术方案,计算了移栽机前方障碍物的odg值,提高了检测和定位的准确度。
28、进一步的,所述基于odg算法推算移栽机前方障碍物类型是指:障碍物的距离和相对速度决定了odg中与障碍物发生碰撞的风险,利用tc与odg算法成反比的关系,当tc→0时,风险显著增加,用回避所需的时间ta定义tc与ta的比率,增加了与车辆发生碰撞时的风险,从而影响odg风险,而ta为设置的一个变量,当ta值越大时,可以保证移栽机与前方障碍物有足够的距离。
29、通过采用上述技术方案,解决了风险判断单一的问题,增加了该算法在判断风险时的准确性。
30、进一步的,所述结合odg-mpc算法发送到移栽机进行稳定运动的控制方法,是指将odg、目标路径的跟踪和输入控制组成;将α的权重值设置为成本函数,β、γ、ζ的权重值分别用于odg、目标路径的跟踪和输入控制,具体为:
31、使用qp计算成本函数的最优控制:
32、
33、其中pγref(h)表示移栽机前方有障碍物时移栽机进行自动避障后选择的位置,随着移栽机向该位置移动,与移栽机相关的风险降低,因此,在低风险情况下,移栽机调整速度,随着危险的降低缓慢增加行驶速度,总之,odg的平均值与初始障碍物的风险进行了比较,如果odg的平均值接近于零,则移栽机以默认速度行驶,如果平均值增加,移栽机减速,如果等于ω,则目标速度为零,并且移栽机停止。
34、通过采用上述技术方案,解决了移栽机发现前方有障碍物后的路径规划问题,提高了控制系统的效率与准确性。
35、进一步的,所述基于odg-mpc算法的成本函数的控制方程,其中移栽机的速度u应居于区间[umin,umax],加速度δu应居于区间[δumin,δumax],其中最小速度、最大速度、最小加速度和最大加速度视实际移栽情况而定。
36、通过采用上述技术方案,解决了移栽机速度变化范围过大的问题,简化了运算步骤,提高了运算效率。
37、综上所述,本发明具有以下有益技术效果:
38、(1)本发明能够改善农机动态建模效率、提高动态计算精度,可处理多入多出(mimo)系统,提高复杂的动态系统控制问题的处理能力。
39、(2)本发明能够较好的处理各种约束条件,包括输入输出约束、状态约束和硬约束等,确保系统在约束条件下的最优性能。
40、(3)本发明可提高对植物的精确定位和操作,避免了人为因素对移栽质量的影响,保证了移栽的准确性和一致性,提高了移栽质量,可保证无人化移栽机在工作时能够精确避障,提高了稳定性与安全性。
41、(4)本发明可减少人力投入和劳动强度,节约人力成本,从而更好的降低整体生产成本。
本文地址:https://www.jishuxx.com/zhuanli/20240730/199310.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
LDO电路的制作方法
下一篇
返回列表