一种农业环境自适应智能巡检机器人系统
- 国知局
- 2024-07-31 23:56:37
本发明属于农业巡检机器人,具体为一种农业环境自适应智能巡检机器人系统。
背景技术:
1、智慧农业巡检机器人是一种基于现代科技的农业智能设备,用于在农田、温室等农业生产环境中进行巡检和监测工作。以下是智慧农业巡检机器人的一般介绍:智慧农业巡检机器人通常配备了自动导航系统,可以通过激光雷达、摄像头等传感器实现自主导航和路径规划,确保在农田内准确移动并完成巡检任务。智慧农业巡检机器人的出现,可以提高农业生产效率,减少人力成本,改善农作物管理水平,有助于实现智慧农业的发展目标,为农民提供更好的农业生产服务。
2、但是现有的智慧农业巡检机器人存在以下问题:
3、应用不广:目前农业机器人多为耕作机器、施肥机器人、除草机器人等应用型机器人,在园区农作物巡检方面仍主要由工作人员在园区农作物行间人工巡检、查看病虫害状况及气象环境等作物生长参数,数字化程度低、人力成本高,极大影响了巡检效率。
4、2.机器人自主性不足:许多现有的农业机器人系统仍然需要人工干预来调整巡检路径或处理异常情况,这限制了机器人的自主性和效率。
技术实现思路
1、本发明的目的在于:为了解决上述提出的问题,提供一种农业环境自适应智能巡检机器人系统。
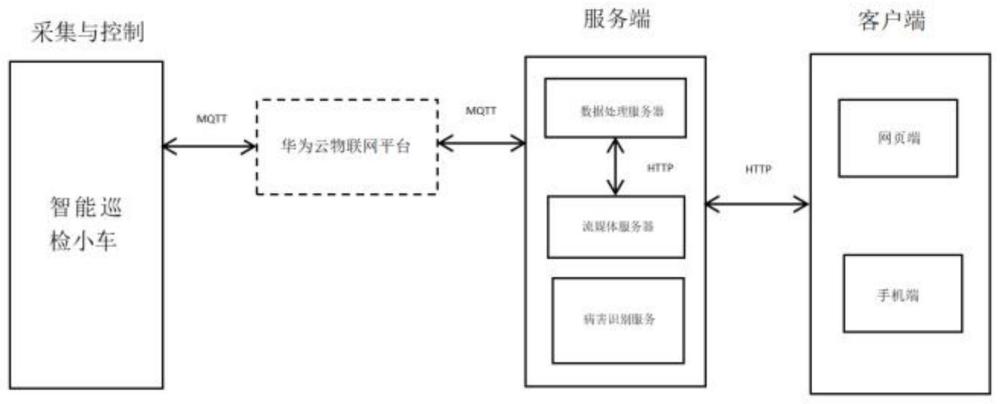
2、本发明采用的技术方案如下:一种农业环境自适应智能巡检机器人系统,所述系统包括采集与控制单元、服务端、客户端和巡检小车端;
3、所述系统使用华为modelarts平台、mindspore框架、altas200dk主控板构建智能小车,在此硬件基础上搭载手机端app;
4、所述系统通过usb摄像头采集实时农作物图像,使用华为modelarts平台和mindspore框架进行病虫害检测识别,采用mqtt协议将环境数据上传至云端存储;硬件平台采用c语言编程,手机端采用uni-app开发平台,服务端采用idea开发平台,手机端采用前端vue框架编程,服务端采用java开发语言编程。
5、在一优选的实施方式中,所述手机端使用vue框架搭建,成功集成了多项功能,包括用户登录、实时环境数据展示、环境阈值设定、视频流实时监控、病害识别反馈,以及智能小车的远程控制;使用echarts(开源可视化库,涵盖各行业图表)来完成数据可视化工作,使得实时环境参数和历史数据更加形象可读;系统中的数据存放在mysql数据库中,方便读取、存储、修改和保存。
6、在一优选的实施方式中,所述采集与控制单元基于华为altas200dk主控板控制多功能小车。
7、在一优选的实施方式中,所述巡检小车端以华为altas200dk为主控板,搭配舵机模块sg90、电机驱动模块l298n、直流减速电机、wifi模块esp8266、温湿度传感器dht11、温度传感器、二氧化碳传感器、氧气浓度传感器;该小车具有循迹功能、避障功能、wifi控制功能、环境温湿度、二氧化碳浓度、氧气浓度检测等功能。
8、在一优选的实施方式中,所述巡检小车端通过uni-app编写app实现http网络通信,实现小车wifi控制以及速度控制等。
9、在一优选的实施方式中,所述巡检小车端的内部设置有自动巡线模块。
10、在自动行驶过程中,小车在没有外部干扰的情况下,会以期望路径作为行进轨迹,并选择距离误差(e)和方向误差(a)作为控制器的输入,输出则是转向轮相对于车体轴线的偏转角(b);小车不断地评估其与期望路径之间的相对位置,一旦发现偏差,就通过调整转向轮的角度来迅速回归到路径上。
11、在一优选的实施方式中,所述自动巡线模块在调整过程中,小车会在前方路径上选择一个特定的点,称为期望点,希望小车能沿着特定轨迹到达该点,并在此点恢复到完全沿着期望路径行驶的状态;期望点的选择取决于当前小车与期望路径的相对偏差;当距离误差(e)较大时,期望点会被选择得较远,因此转向角也会较大;在相同的距离误差下,不同的方向偏差会导致选取不同的期望点和转向角;由于道路条件的变化,小车的线速度也会有所变化;研究显示,小车的前进线速度主要受两个因素影响:道路的弯曲程度和小车相对于期望点的方向偏差;在通过视觉识别和路径规划后,自主移动小车已经能够沿着理想的路径行驶,该路径通过一系列连接点的折线来表示,道路的弯曲程度可以用这些折线之间的夹角总和来衡量。
12、在一优选的实施方式中,所述自动巡线模块在确定了目标点之后,依据目标点与小车所建立坐标系统的角度差α以及行进路线上起点至预判点的弯度角β的数值,来确定该周期内小车的线性速度大小u;速度等级分为三个级别较为适宜;(1)当α与β都小于10度时,表明行进路线为直线,此时若目标点位于小车的正前方,则u应用高速挡,实验中设置为5.4km/h;(2)当α超过40度或β超过90度时,说明行进路线出现明显弯曲,目标点显著偏离小车正前方,此时小车应使用低速档进行转弯,实验中设定u为0.54km/h;(3)对于其他情况,即路线稍有弯曲,目标点与小车正前方存在一定偏差但不大,此时小车可以维持在中速挡,并通过调整角速度来控制行驶方向,此时u设定为1.59km/h。
13、在一优选的实施方式中,所述巡检小车端的内部设置有病害识别模块,病害识别模块当小车巡检时,视频传输模块会对植物进行监测;当摄像头捕捉到植物后,进行病害识别,会将识别结果进行上报;首先摄像头进行视频采集,接着读取图片帧,将获取的图像在华为云平台进行预处理后,基于yolov5进行病害识别,接着获取并解析返回值,最后在app上进行显示。
14、综上所述,由于采用了上述技术方案,本发明的有益效果是:
15、1、本发明中,通过实时采集农作物图像并利用wifi模块进行数据传输,实现了实时监测和远程控制。用户可以通过手机app远程控制小车,实时获取环境数据和视频流,进行环境阈值设定,这一切都在提高农业生产效率的同时,确保了用户可以随时随地管理农业生产。
16、2、本发明中,自动巡检功能在智能小车上的应用为农业生产带来了革命性的改变。通过预设的路线和任务,智能小车可以在农田、温室或其他农业生产环境中自主进行巡检工作,从而提高生产效率,降低人力成本,并确保作物生长的最佳条件。
17、3、本发明中,采集与控制单元设计中的多功能小车集成了一系列传感器和驱动模块,具备循迹、避障、环境检测等功能,相较于单一功能的病虫害检测设备,大大扩展了应用场景,提高了设备的实用性。
18、4、本发明中,使用vue框架和echarts库进行软件开发,使得数据处理和可视化更加直观和方便。这不仅使得实时环境参数和历史数据更加易于理解,也提升了用户体验。
19、5、本发明中,通过usb摄像头采集实时农作物图像,使用华为modelarts平台和mindspore框架进行病虫害检测识别,采用mqtt协议将环境数据上传至云端存储。硬件平台采用c语言编程,手机端采用uni-app开发平台,服务端采用idea开发平台,手机端采用前端vue框架编程,服务端采用java开发语言编程。各个端的协调工作,为用户营造一个稳定、高效的监测系统,使得农业病虫害识别更智能、稳定与高效。由于提高了病害检测的准确性和效率,可以减少因病害造成的农作物损失,提高产量,从而提高生产的经济效益。
本文地址:https://www.jishuxx.com/zhuanli/20240730/199307.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。