无人机建筑外墙智能巡检方法及系统
- 国知局
- 2024-08-01 00:08:49
本公开实施例涉及建筑物智能检测,尤其涉及一种无人机建筑外墙智能巡检方法及系统。
背景技术:
1、城市建筑的外墙主要分为有装饰的瓷砖墙、玻璃幕墙和没有装饰的水泥沙浆粉刷墙。普通高层住宅和其他低层建筑的外墙主要用瓷砖装饰或是水泥砂浆粉刷,超高层写字楼主要用玻璃幕墙装饰。无论哪种形式的外墙都会逐渐老化,外墙饰面砖会因粘贴材料和施工缺陷导致空鼓塌落,玻璃幕墙和水泥沙浆外墙会随着雨水、强风及地震等造成开裂剥落。为了保证结构性能安全和延长建筑寿命,每年都需要花费大量的人力和物力进行日常运维。 而外墙巡检已成为建筑日常运维的重要部分,传统的外墙巡检方法主要有目测法和锤击法,但是现有的人工运维模式已经无法满足日益增长的需求。
2、为了探索新的运维模式以满足日益增长的运维需求,业界已经广泛将新兴技术用于外墙巡检。相关技术中利用无人机巡检建筑外墙,其需要设置规划路径,生成巡检任务并由无人机执行,采集外墙图像进行图像识别外墙病害。但是相关技术中依然存在一些问题:无法在巡检效率和巡检识别结果准确性之间实现平衡。
技术实现思路
1、为了解决上述技术问题或者至少部分地解决上述技术问题,本公开实施例提供了一种无人机建筑外墙智能巡检方法及系统。
2、第一方面,本公开实施例提供了一种无人机建筑外墙智能巡检方法,该方法应用于无人机巡检平台,包括:
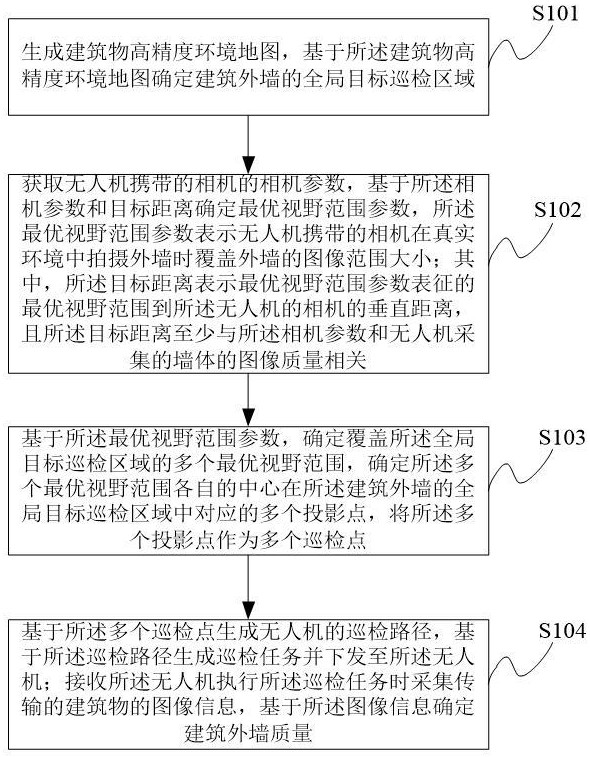
3、生成建筑物高精度环境地图,基于所述建筑物高精度环境地图确定建筑外墙的全局目标巡检区域;
4、获取无人机携带的相机的相机参数,基于所述相机参数和目标距离确定最优视野范围参数,所述最优视野范围参数表示无人机携带的相机在真实环境中拍摄外墙时覆盖外墙的图像范围大小;其中,所述目标距离表示最优视野范围参数表征的最优视野范围到所述无人机的相机的垂直距离,且所述目标距离至少与所述相机参数和无人机采集的墙体的图像质量相关;
5、基于所述最优视野范围参数,确定覆盖所述全局目标巡检区域的多个最优视野范围,确定所述多个最优视野范围各自的中心在所述建筑外墙的全局目标巡检区域中对应的多个投影点,将所述多个投影点作为多个巡检点;
6、基于所述多个巡检点生成无人机的巡检路径,基于所述巡检路径生成巡检任务并下发至所述无人机;接收所述无人机执行所述巡检任务时采集传输的建筑物的图像信息,基于所述图像信息确定建筑外墙质量。
7、在一个实施例中,所述生成建筑物高精度环境地图,包括:
8、获取建筑物的建筑信息模型bim,从所述bim中获取建筑物的几何信息和非几何信息,从所述几何信息中提取建筑物外边界信息,基于所述建筑物外边界信息和所述非几何信息重建建筑物三维外边界以得到建筑物高精度环境地图。
9、在一个实施例中,该方法还包括:
10、基于所述图像信息确定建筑外墙质量存在病害时,定位所述图像信息中的病害位置坐标,将所述病害位置坐标转换为世界坐标,基于所述世界坐标确定所述无人机的局部目标巡检区域,在所述局部目标巡检区域内控制改变所述无人机的相机的焦距以具体查看病害信息。
11、在一个实施例中,该方法还包括:
12、将所述图像信息输入预先训练好的图像识别模型,以输出建筑外墙病害信息;其中,所述建筑外墙病害信息至少包括病害的区域大小以及区域位置坐标,所述图像识别模型是预先基于建筑外墙的样本图像对mask r-cnn算法模型训练得到的。
13、在一个实施例中,所述基于所述最优视野范围参数,确定覆盖所述全局目标巡检区域的多个最优视野范围,包括:
14、基于所述最优视野范围参数将所述全局目标巡检区域划分成多个面积大小相同的矩形子区域;其中,每个所述矩形子区域的面积大小与所述最优视野范围参数表征的最优视野范围大小匹配;
15、为每个所述矩形子区域覆盖所述最优视野范围参数表征的最优视野范围,以得到覆盖所述全局目标巡检区域的多个最优视野范围。
16、在一个实施例中,所述建筑外墙的全局目标巡检区域包括多个不同的巡检区域,所述多个不同的巡检区域由建筑物的形状和结构划分;该方法还包括:确定所述多个不同的巡检区域各自的宽度,去除宽度小于预设安全距离的巡检区域。
17、在一个实施例中,在所述相机参数确定时,所述目标距离与所述图像质量呈负相关。
18、第二方面,本公开实施例提供一种无人机建筑外墙智能巡检系统,包括:
19、区域生成模块,用于生成建筑物高精度环境地图,基于所述建筑物高精度环境地图确定建筑外墙的全局目标巡检区域;
20、参数确定模块,用于获取无人机携带的相机的相机参数,基于所述相机参数和目标距离确定最优视野范围参数,所述最优视野范围参数表示无人机携带的相机在真实环境中拍摄外墙时覆盖外墙的图像范围大小;其中,所述目标距离表示最优视野范围参数表征的最优视野范围到所述无人机的相机的垂直距离,且所述目标距离至少与所述相机参数和无人机采集的墙体的图像质量相关;
21、巡检点确定模块,用于基于所述最优视野范围参数,确定覆盖所述全局目标巡检区域的多个最优视野范围,确定所述多个最优视野范围各自的中心在所述建筑外墙的全局目标巡检区域中对应的多个投影点,将所述多个投影点作为多个巡检点;
22、巡检处理模块,用于基于所述多个巡检点生成无人机的巡检路径,基于所述巡检路径生成巡检任务并下发至所述无人机;接收所述无人机执行所述巡检任务时采集传输的建筑物的图像信息,基于所述图像信息确定建筑外墙质量。
23、第三方面,本公开实施例提供一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现上述任一实施例无人机建筑外墙智能巡检方法。
24、第四方面,本公开实施例提供一种电子设备,包括:
25、处理器;以及
26、存储器,用于存储计算机程序;
27、其中,所述处理器配置为经由执行所述计算机程序来执行上述任一实施例所述无人机建筑外墙智能巡检方法。
28、本公开实施例提供的技术方案与现有技术相比具有如下优点:
29、本公开实施例提供的无人机建筑外墙智能巡检方法及系统,生成建筑物高精度环境地图,基于所述建筑物高精度环境地图确定建筑外墙的全局目标巡检区域;获取无人机携带的相机的相机参数,基于所述相机参数和目标距离确定最优视野范围参数,所述最优视野范围参数表示无人机携带的相机在真实环境中拍摄外墙时覆盖外墙的图像范围大小;其中,所述目标距离表示最优视野范围参数表征的最优视野范围到所述无人机的相机的垂直距离,且所述目标距离至少与所述相机参数和无人机采集的墙体的图像质量相关;基于所述最优视野范围参数,确定覆盖所述全局目标巡检区域的多个最优视野范围,确定所述多个最优视野范围各自的中心在所述建筑外墙的全局目标巡检区域中对应的多个投影点,将所述多个投影点作为多个巡检点;基于所述多个巡检点生成无人机的巡检路径,基于所述巡检路径生成巡检任务并下发至所述无人机;接收所述无人机执行所述巡检任务时采集传输的建筑物的图像信息,基于所述图像信息确定建筑外墙质量。本实施例的方案基于建筑物高精度环境地图为路径规划提供可靠基础,从而可准确确定巡检区域并最终确定巡检点生成巡检任务,其中确定巡检点及巡检路径时,考虑相机的最优视野范围且将其与采集图像质量和相机参数关联,据此划分巡检区域设置合适位置和数量的巡检点,在能够确保采集到清晰的图像的同时不设置过多数量的巡检点,如此可在准确识别建筑外墙病害的前提下,尽可能提高巡检效率,也即兼顾达到提高建筑外墙巡检效率的同时,提高建筑外墙的巡检结果的准确性。
本文地址:https://www.jishuxx.com/zhuanli/20240730/199811.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表