一种大棚用农业机器人自动驾驶方法与流程
- 国知局
- 2024-08-01 00:12:47
本发明涉及自动驾驶领域,尤其涉及一种大棚用农业机器人自动驾驶方法。
背景技术:
1、大棚种植是一种农业种植技术,以控制温度、湿度、光照等条件,以适应作物的生长需求。目前多数大棚均采用传统的人工管理,更进一步的大棚智能控制值设备也均集中于农作物生长过程中的智能管理,例如自动放风、自动铺卷棉被等对温湿度和光照的控制,缺少针对种植、浇水、施肥等种植工序的大棚专用机器人。同时由于大棚的面积不尽相同,支撑大棚的支柱位置也不尽相同,导致机器人进入不同的大棚需要人工规划不同的机器人形式路线。
2、同时,由于大棚作物的耕作层比较浅,翻耕时也不会特意深耕,容易导致土壤板结现象的产生,农业机器人形式过程中经常因为土壤的板结导致行驶路线出现偏差,从而对农作物产生影响。
技术实现思路
1、本发明提供一种大棚用农业机器人自动驾驶方法,无需人工介入可以自动规划农业机器人在大棚中的行车路线。
2、为解决上述技术问题,一种大棚用农业机器人自动驾驶方法,其特征在于,包括如下步骤:
3、s1,启动手持终端,对目标区域进行采点测量,绘制获得目标区域地图;
4、s2,将目标区域地图上传到服务器;
5、s3,调出农业机器人预设参数结合目标区域地图、目标区域要求获取农业机器人行车路径,并将农业机器人行车路径同步保存到服务器;
6、s4,根据农业机器人种类输入行进参数,启动农业机器人,操控农业机器人按照规划的行车路径行驶。
7、所述步骤s1中目标区域地图包括目标区域边界坐标参数及目标区域障碍物坐标参数。
8、所述步骤s3中农业机器人预设参数包括农业机器人本体的长度l、宽度w、转弯半径r和农业机器人本体的作业宽度w1;所述目标区域要求包括目标区域要求作业的行数n。
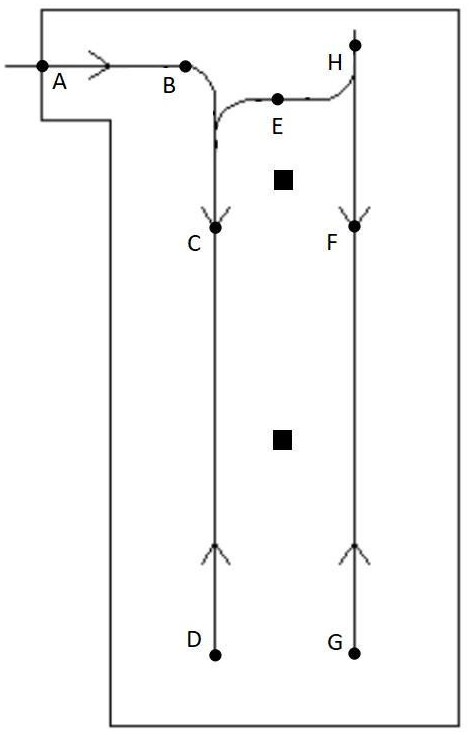
9、所述步骤s3中包括如下步骤:s31,判断目标区域地图中大棚入口的位置坐标;s32,将目标区域要求作业的行数n平均分配在目标区域的宽度内;s33,判断相邻的两条目标区域要求作业的行数之间的距离l1是否大于农业机器人本体的作业宽度w,若是则执行下一步,反之将目标区域要求作业的行数n=n-1并返回步骤s32;s34,根据农业机器人本体的转弯半径r,将目标区域地图中大棚入口的位置与在目标区域地图中最接近大棚入口的作业行相连;s35,以步骤s34中作业行中最靠近大棚入口的点为起点,以步骤s34中作业行中远离大棚入口的点为终点,所述行车路径在步骤s34中的作业行上的起点和终点行驶一个来回,并回到所述起点;s36,判断n是否为1,若是则执行步骤s39,反之则执行步骤s37;s37,根据农业机器人本体的转弯半径,以步骤s35中的起点作为过度段起点,行车路径规划直至将农业机器人正对第n行的作业行,并以第n行作业行靠近大棚入口处作为起点,将农业机器人行驶到起点处,以第n行作业行远离大棚入口处作为终点,在起点与终点行驶一个来回,并回到起点;s38,判断当前作业的行数n=n,若否则n=n+1并返回步骤s37,反之执行步骤s39美漫;s39,根据农业机器人本体的转弯半径r,将行车路径规划返回到大棚入口。
10、还包括步骤s5,自动检测系统对障碍物进行检测,控制农业机器人停止,其中自动检测系统包括激光测距,当激光测距检测到农业机器人行进路径上存在障碍物时,控制农业机器人减速或停止。
11、所述激光测距检测障碍物时,判断障碍物与农业机器人之间的距离l2,当20cm<l2<50cm时,控制农业机器人减速,当l2<20cm时,控制农业机器人停止行进。
12、所述手持终端可从服务器内直接获取行车路径,获取到目标区域数据后,检测系统工作直接规划行驶路径,使车辆按照行驶路径进行作业。
13、所述农业机器人行进参数包括速度、方向、启停控制等,工控机根据农业机器人行进参数确定行车路径上农业机器人的运转。
14、根据本发明,无需人工介入,根据大棚的位置数据以及机器人本身的参数可以自动为机器人规划在大棚中的形式路线;并且,采用倒车进入的方法,尽可能减少机器人由于土壤因素导致自身行驶出现偏差,从而确保作业效果。
技术特征:1.一种大棚用农业机器人自动驾驶方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种大棚用农业机器人自动驾驶方法,其特征在于:所述步骤s1中目标区域地图包括目标区域边界坐标参数及目标区域障碍物坐标参数。
3.根据权利要求1所述的一种大棚用农业机器人自动驾驶方法,其特征在于:所述步骤s3中农业机器人预设参数包括农业机器人本体的长度l、宽度w、转弯半径r和农业机器人本体的作业宽度w1;所述目标区域要求包括目标区域要求作业的行数n。
4.根据权利要求3所述的一种大棚用农业机器人自动驾驶方法,其特征在于所述步骤s3中包括如下步骤:s31,判断目标区域地图中大棚入口的位置坐标;s32,将目标区域要求作业的行数n平均分配在目标区域的宽度内;s33,判断相邻的两条目标区域要求作业的行数之间的距离l1是否大于农业机器人本体的作业宽度w,若是则执行下一步,反之将目标区域要求作业的行数n=n-1并返回步骤s32;s34,根据农业机器人本体的转弯半径r,将目标区域地图中大棚入口的位置与在目标区域地图中最接近大棚入口的作业行相连;s35,以步骤s34中作业行中最靠近大棚入口的点为起点,以步骤s34中作业行中远离大棚入口的点为终点,所述行车路径在步骤s34中的作业行上的起点和终点行驶一个来回,并回到所述起点;s36,判断n是否为1,若是则执行步骤s39,反之则执行步骤s37;s37,根据农业机器人本体的转弯半径,以步骤s35中的起点作为过度段起点,行车路径规划直至将农业机器人正对第n行的作业行,并以第n行作业行靠近大棚入口处作为起点,将农业机器人行驶到起点处,以第n行作业行远离大棚入口处作为终点,在起点与终点行驶一个来回,并回到起点;s38,判断当前作业的行数n=n,若否则n=n+1并返回步骤s37,反之执行步骤s39;s39,根据农业机器人本体的转弯半径r,将行车路径规划返回到大棚入口。
5.根据权利要求1所述的一种大棚用农业机器人自动驾驶方法,其特征在于:还包括步骤s5,自动检测系统对障碍物进行检测,控制农业机器人停止,其中自动检测系统包括激光测距,当激光测距检测到农业机器人行进路径上存在障碍物时,控制农业机器人减速或停止。
6.根据权利要求5所述的一种农业机器人自动驾驶方法,其特征在于:所述激光测距检测障碍物时,判断障碍物与农业机器人之间的距离l2,当20cm<l2<50cm时,控制农业机器人减速,当l2
7.根据权利要求1所述的一种大棚用农业机器人自动驾驶方法,其特征在于:所述手持终端可从服务器内直接获取行车路径,获取到目标区域数据后,检测系统工作直接规划行驶路径,使车辆按照行驶路径进行作业。
8.根据权利要求1所述的一种大棚用农业机器人自动驾驶方法,其特征在于:所述农业机器人行进参数包括速度、方向、启停控制等,工控机根据农业机器人行进参数确定行车路径上农业机器人的运转。
技术总结本发明涉及自动驾驶领域,尤其涉及一种大棚用农业机器人自动驾驶方法。包括如下步骤:S1,启动手持终端,对目标区域进行采点测量,绘制获得目标区域地图;S2,将目标区域地图上传到服务器;S3,调出农业机器人预设参数结合目标区域地图、目标区域要求获取农业机器人行车路径,并将农业机器人行车路径同步保存到服务器;S4,根据农业机器人种类输入行进参数,启动农业机器人,操控农业机器人按照规划的行车路径行驶。根据本发明,无需人工介入,根据大棚的位置数据以及机器人本身的参数可以自动为机器人规划在大棚中的形式路线;并且,采用倒车进入的方法,尽可能减少机器人由于土壤因素导致自身行驶出现偏差,从而确保作业效果。技术研发人员:谢辉,杨传德受保护的技术使用者:上海点甜网络科技有限公司技术研发日:技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240730/200031.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表