一种基于舵面矢量分配的尾座式无人机定点悬停控制方法与流程
- 国知局
- 2024-08-01 00:14:14
本发明属于飞行控制律设计领域,具体为一种基于舵面矢量分配的尾座式无人机定点悬停控制方法。
背景技术:
1、垂直起降飞行器利用发动机提供的垂直向上的推力以克服重力,从而实现垂直起降。此类飞行器能够摆脱对机场跑道的依赖,具有出航灵活、出勤率高、保障成本低等优点;另外,还能在舰船上进行起降,在提高两栖作战能力方面,具有滑跑起降舰载机无法比拟的优势。垂直起降飞行器发展至今,主要类型有:尾座式、倾转旋翼式、旋翼类、喷气发动机推力转向式、涵道风扇类,以及这些方式的混合式。
2、其中,尾座式垂直起降无人机是一种起降过程中机体整体倾转的飞行器,可采用螺旋桨、涵道推进器、涡喷发动机等作为动力,凭借其质量轻、尺寸小、动力系统简单等特点,能够在船舶甲板、山地、峡谷、巷子等狭小空间进行起降,携带有效载荷后可用于执行侦察、中继通信、攻击等任务,具有广泛应用前景。
3、尾座式垂直起降无人机在定点悬停时,需要将无人机由当前位置移动至目标位置,而尾座式垂直起降无人机一般布置有多个舵面,如4个、6个、8个等舵面数量。若规定每个舵面的角色,例如某几个舵面负责前后方向的位置控制,而其他舵面负责左右方向的位置控制,这会降低舵面操纵效率,没能在每一时刻都发挥出所有舵面的能力。因此,如何对多个舵面进行合理分配,以实现较高的舵面操纵效率,避免多舵面之间的操纵内耗,成为定点悬停的一个难题。
4、通过检索现有技术,公开号为cn116610134a的专利的方法是与本提案最为接近的,但其存在一些不足:(1)对比文件所述方法的控制器为非线性的自适应控制器,控制律结构复杂,计算量大;(2)对比文件所述方法未体现出悬停过程中对飞行器的位置和方向的控制,仅描述了对三通道力矩的控制,其所公开的内容无法实现定点悬停控制。
技术实现思路
1、为了解决上述现有技术中存在的问题和不足,本发明提出了一种基于舵面矢量分配的尾座式无人机定点悬停控制方法。
2、为了实现上述发明目的,本技术提供的技术方案如下:
3、一种基于舵面矢量分配的尾座式无人机定点悬停控制方法,包括如下步骤:
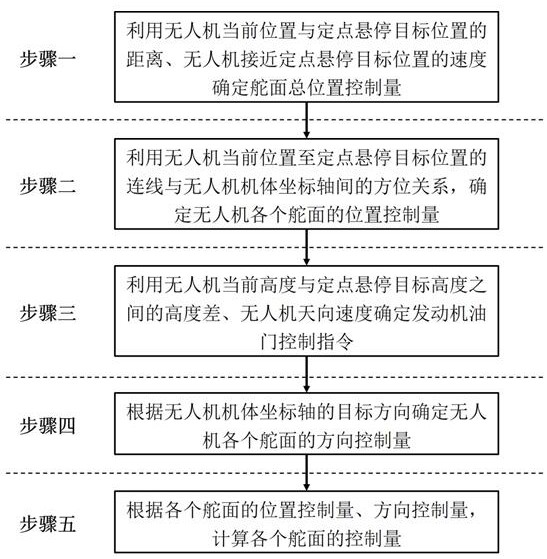
4、步骤一、利用无人机当前位置与定点悬停目标位置的距离、无人机接近定点悬停目标位置的速度确定舵面总位置控制量;
5、步骤二、利用无人机当前位置至定点悬停目标位置的连线与无人机机体坐标轴间的方位关系,确定无人机各个舵面的位置控制量;
6、步骤三、利用无人机当前高度与定点悬停目标高度之间的高度差、无人机天向速度确定发动机油门控制指令;
7、步骤四、根据无人机机体坐标轴的目标方向确定无人机各个舵面的方向控制量;
8、步骤五、根据各个舵面的位置控制量、方向控制量,计算各个舵面的控制量。
9、进一步地,步骤一的具体步骤为:
10、步骤s11.建立地面参考坐标系;
11、步骤s12.计算无人机当前位置在地面参考坐标系中的坐标值;
12、步骤s13.计算无人机当前位置与定点悬停目标位置的距离;
13、步骤s14.计算无人机接近定点悬停目标位置的速度;
14、步骤s15.计算舵面总位置控制量。
15、再进一步地,所述步骤s11中,建立地面参考坐标系,包括:
16、以定点悬停目标位置为坐标原点o,地理北向为坐标轴ox轴的正方向,地理东向为坐标轴oy轴的正方向,oz轴垂直于oxy平面且指向地心为正方向。
17、更进一步地,所述步骤s12中,无人机当前位置在地面参考坐标系中的坐标值如下:
18、
19、其中,(x,y,z)为无人机当前位置在地面参考坐标系中的坐标值,r为地球赤道平均半径,e为地球扁率,hp为无人机当前高度,ho为定点悬停目标高度,lonp为无人机当前位置的经度,latp为无人机当前位置的纬度,lono为定点悬停目标位置的经度,lato为定点悬停目标位置的纬度。
20、更进一步地,所述步骤s13中,计算无人机当前位置与定点悬停目标位置的距离的方法为:
21、
22、其中,δl为无人机当前位置与定点悬停目标位置的距离。
23、更进一步地,所述步骤s14中,无人机接近定点悬停目标位置的速度即为无人机当前的东向速度、北向速度在无人机当前位置至定点悬停目标位置的连线上的投影,具体计算方法为:
24、
25、其中,vn为无人机当前的北向速度,ve为无人机当前的东向速度,vl为无人机接近定点悬停目标位置的速度。vn和ve可由机载导航设备测量得到。
26、更进一步地,所述步骤s15中,舵面总位置控制量由位置控制器解算得到,而位置控制器由位置控制回路和无人机接近定点悬停目标位置的速度控制回路构成。
27、更加进一步地,所述位置控制回路采用无人机当前位置与定点悬停目标位置的距离δl的比例控制加积分控制结构,具体为:
28、
29、其中,kl为位置控制比例项控制参数,kil为位置控制积分项控制参数,为无人机接近定点悬停目标位置的速度控制目标。
30、更加进一步地,所述无人机接近定点悬停目标位置的速度控制回路采用无人机接近定点悬停目标位置的速度与无人机接近定点悬停目标位置的速度控制目标的误差的积分控制结构,并以无人机接近定点悬停目标位置的速度作为阻尼项,具体为:
31、
32、其中,kv为无人机接近定点悬停目标位置的速度控制阻尼项控制参数,kiv为无人机接近定点悬停目标位置的速度控制积分项控制参数,δl为舵面总位置控制量。
33、进一步地,所述步骤二的具体步骤为:
34、步骤s21.计算无人机当前位置至定点悬停目标位置连线的方位角;
35、步骤s22.建立机体坐标系;
36、步骤s23.计算无人机当前位置至定点悬停目标位置的连线与无人机机体坐标轴间的方位角差;
37、步骤s24.通过矢量分配将舵面总位置控制量分配至无人机的各个舵面。
38、再进一步地,所述步骤s21中,无人机当前位置至定点悬停目标位置连线的方位角定义为:由无人机当前位置指向定点悬停目标位置的向量与地理北向的夹角,且以地理北向为起始,该向量向东旋转时方位角符号为正,否则为负,方位角的数值范围为[-180°,180°],方位角的具体计算方法为:
39、
40、其中,为无人机当前位置至定点悬停目标位置连线的方位角。
41、再进一步地,所述步骤s22中,建立机体坐标系包括:
42、以飞机重心op为坐标原点;螺旋桨中心或发动机尾喷口中心与坐标原点op的连线为opxp轴,且指向机头方向为正;opyp轴垂直于机身纵向对称面,且指向右机翼为正;opzp轴依据右手法则确定。
43、再进一步地,所述步骤s23中无人机当前位置至定点悬停目标位置的连线与无人机机体坐标轴间的方位角差计算方法为:
44、
45、其中,为无人机当前位置至定点悬停目标位置的连线与无人机机体坐标轴间的方位角差,其数值范围为[-180°,180°],为无人机机体坐标轴的方位角,定义为:无人机机体坐标系opzp轴与地理北向的夹角,也就是偏航角,由机载姿态传感器测量得到,的数值范围为[-180°,180°]。
46、再进一步地,所述步骤s24中舵面总位置控制量根据无人机舵面布局形式采用对应的分配方法,所述舵面布局形式具体特征包括:无人机舵面的数量、舵面在涵道中的分布位置。
47、优选地,本发明提出3种尾座式无人机舵面布局形式:
48、尾座式无人机舵面布局形式a:无人机舵面数量为4片,并围绕涵道中心呈放射状均匀分布,即任意相邻2片舵面的转轴的夹角都为90°,其中有2片舵面的转轴在机体坐标系opxpzp平面内,且在opzp轴负方向一侧的舵面标记为a1号舵面,由机尾向机头方向看去,其余舵面按逆时针方向依次标记为a2号舵面、a3号舵面、a4号舵面;
49、布局形式a各舵面的符号定义:由机尾向机头方向看去,a1号舵面向opyp轴负方向偏转时舵面符号为正,否则为负;a3号舵面向opyp轴负方向偏转时舵面符号为正,否则为负;a2号舵面向opzp轴正方向偏转时舵面符号为正,否则为负;a4号舵面向opzp轴正方向偏转时舵面符号为正,否则为负;
50、针对布局形式a,则舵面总位置控制量分配至无人机各个舵面的方法为:
51、
52、
53、其中,为1号舵面的位置控制量,为2号舵面的位置控制量,为3号舵面的位置控制量,为4号舵面的位置控制量。
54、优选地,尾座式无人机舵面布局形式b为:无人机舵面数量为6片,并围绕涵道中心呈放射状均匀分布,即任意相邻2片舵面的转轴的夹角都为60°,其中有2片舵面的转轴在机体坐标系opxpzp平面内,且在opzp轴负方向一侧的舵面标记为b1号舵面,由机尾向机头方向看去,其余舵面按逆时针方向依次标记为b2号舵面、b3号舵面、b4号舵面、b5号舵面、b6号舵面;
55、布局形式b各舵面的符号定义:由机尾向机头方向看去,b1号舵面向opyp轴负方向偏转时舵面符号为正,否则为负;b4号舵面向opyp轴负方向偏转时舵面符号为正,否则为负;b2号舵面向b1号舵面偏转时舵面符号为正,否则为负;b3号舵面向b2号舵面偏转时舵面符号为正,否则为负;b5号舵面向b6号舵面偏转时舵面符号为正,否则为负;b6号舵面向b1号舵面偏转时舵面符号为正,否则为负;
56、针对无人机舵面为布局形式b,则舵面总位置控制量分配至无人机各个舵面的方法为:
57、
58、
59、其中,为1号舵面的位置控制量,为2号舵面的位置控制量,为3号舵面的位置控制量,为4号舵面的位置控制量,为5号舵面的位置控制量,为6号舵面的位置控制量。
60、优选地,尾座式无人机舵面布局形式c:无人机舵面数量为8片,并围绕涵道中心呈放射状均匀分布,即任意相邻2片舵面的转轴的夹角都为45°,其中有2片舵面的转轴在机体坐标系opxpzp平面内,且在opzp轴负方向一侧的舵面标记为c1号舵面,由机尾向机头方向看去,其余舵面按逆时针方向依次标记为c2号舵面、c3号舵面、c4号舵面、c5号舵面、c6号舵面、c7号舵面、c8号舵面;
61、布局形式c各舵面的符号定义:由机尾向机头方向看去,c1号舵面向opyp轴负方向偏转时舵面符号为正,否则为负;c5号舵面向opyp轴负方向偏转时舵面符号为正,否则为负;c3号舵面向opzp轴正方向偏转时舵面符号为正,否则为负;c7号舵面向opzp轴正方向偏转时舵面符号为正,否则为负;c2号舵面向c1号舵面偏转时舵面符号为正,否则为负;c4号舵面向c3号舵面偏转时舵面符号为正,否则为负;c8号舵面向c1号舵面偏转时舵面符号为正,否则为负;c6号舵面向c7号舵面偏转时舵面符号为正,否则为负;
62、针对无人机舵面为布局形式c,则舵面总位置控制量分配至无人机各个舵面的方法为:
63、
64、
65、
66、
67、其中,为1号舵面的位置控制量,为2号舵面的位置控制量,为3号舵面的位置控制量,为4号舵面的位置控制量,为5号舵面的位置控制量,为6号舵面的位置控制量,为7号舵面的位置控制量,为8号舵面的位置控制量。
68、从上述3种舵面布局形式的各舵面位置控制量确定方法可以看出,矢量分配的含义为:将舵面总位置控制量分配至无人机的各个舵面,而所有舵面的总控制效果等效于舵面总位置控制量。显然,各个舵面的位置控制量是实际的舵面操纵量,而舵面总位置控制量是一个虚拟的量。
69、进一步地,所述步骤三的具体步骤为:
70、步骤s31.设计无人机高度控制回路,该回路的输出量为天向速度控制目标;
71、步骤s32.基于步骤s31得到的天向速度控制目标,设计无人机天向速度控制回路,该回路的输出量为发动机油门控制指令。
72、再进一步地,所述步骤s31中,无人机高度控制回路采用高度差的比例控制结构,具体为:
73、
74、其中,kh为高度控制比例项控制参数,h为无人机当前高度,hg为定点悬停目标高度,为天向速度控制目标。
75、再进一步地,所述步骤s32中,无人机天向速度控制回路采用天向速度与天向速度控制目标误差的比例控制加积分控制结构,具体为:
76、
77、其中,为天向速度控制比例项控制参数,为天向速度控制积分项控制参数,为无人机天向速度,δt为发动机油门控制指令。
78、进一步地,步骤四具体步骤为:
79、步骤s41.设计无人机方向控制器,该回路的输出量为舵面总方向控制量;
80、步骤s42.根据舵面分配策略,将舵面总方向控制量分配至无人机的各个舵面。
81、再进一步地,所述步骤s41中,无人机方向控制器采用偏航角与偏航角目标之差的比例控制加积分控制结构,具体为:
82、
83、其中,为偏航角目标控制比例控制参数,为偏航角目标控制积分控制参数,为偏航角,为偏航角目标,为舵面总方向控制量。
84、进一步地,所述偏航角目标由飞行任务确定,例如机载光电球头需要对准某个方向进行持续跟踪拍摄,或机载武器需要瞄准某个方向,本发明提出的方法在控制无人机位置时,可同时控制偏航角目标,即无人机在移动过程中能够将机体始终对准某个方向。
85、再进一步地,所述步骤s42中舵面总方向控制量根据不同的无人机舵面布局形式采用不同的分配方法。
86、若无人机舵面为布局形式a,则舵面总方向控制量分配至无人机各个舵面的方法为:
87、
88、
89、其中,为1号舵面的方向控制量,为2号舵面的方向控制量,为3号舵面的方向控制量,为4号舵面的方向控制量。
90、再进一步地,所述步骤s42中若无人机舵面为布局形式b,则舵面总方向控制量分配至无人机各个舵面的方法为:
91、
92、
93、其中,为1号舵面的方向控制量,为2号舵面的方向控制量,为3号舵面的方向控制量,为4号舵面的方向控制量,为5号舵面的方向控制量,为6号舵面的方向控制量。
94、再进一步地,所述步骤s42中若无人机舵面为布局形式c,则舵面总方向控制量分配至无人机各个舵面的方法为:
95、
96、
97、其中,为1号舵面的方向控制量,为2号舵面的方向控制量,为3号舵面的方向控制量,为4号舵面的方向控制量,为5号舵面的方向控制量,为6号舵面的方向控制量,为7号舵面的方向控制量,为8号舵面的方向控制量。
98、从上述3种舵面布局形式的各舵面方向控制量确定方法可以看出,矢量分配的含义为:将舵面总方向控制量分配至无人机的各个舵面,而所有舵面的总控制效果等效于舵面总方向控制量。显然,各个舵面的方向控制量是实际的舵面操纵量,而舵面总方向控制量是一个虚拟的量。
99、进一步地,所述步骤五具体为:
100、无人机舵面为布局形式a,则各个舵面的控制量的计算方法为:
101、
102、
103、
104、
105、其中,δa1为1号舵面的控制量,δa2为2号舵面的控制量,δa3为3号舵面的控制量,δa4为4号舵面的控制量。
106、进一步地,所述步骤五具体为:
107、无人机舵面为布局形式b,则各个舵面的控制量的计算方法为:
108、
109、
110、
111、
112、
113、
114、其中,δb1为1号舵面的控制量,δb2为2号舵面的控制量,δb3为3号舵面的控制量,δb4为4号舵面的控制量,δb5为5号舵面的控制量,δb6为6号舵面的控制量。
115、进一步地,所述步骤五具体为:
116、无人机舵面为布局形式c,则各个舵面的控制量的计算方法为:
117、
118、
119、
120、
121、
122、
123、
124、
125、其中,δc1为1号舵面的控制量,δc2为2号舵面的控制量,δc3为3号舵面的控制量,δc4为4号舵面的控制量,δc5为5号舵面的控制量,δc6为6号舵面的控制量,δc7为7号舵面的控制量,δc8为8号舵面的控制量。
126、本发明的有益效果在于:
127、1、本发明公开的一种基于舵面矢量分配的尾座式无人机定点悬停控制方法利用矢量分配,使得无人机总能在前进方向上获得最大的舵面操纵效率,避免了多舵面之间的操纵内耗。
128、2、本发明公开定点悬停控制方法在控制无人机位置时,可同时控制偏航角目标,即无人机在移动过程中能够将机体始终对准某个方向,这对机载光电球头持续跟踪拍摄、机载武器瞄准等飞行任务来说是很有利的。
129、3、本发明公开的定点悬停控制方法的位置控制器及方向控制器采用pid控制结构,飞行控制律算法简单,便于工程实现。
本文地址:https://www.jishuxx.com/zhuanli/20240730/200148.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。