基于地图平面网格计算车辆位置聚合的方法与流程
- 国知局
- 2024-07-31 20:26:10
本发明涉及智能交通,尤其涉及一种基于地图平面网格计算车辆位置聚合的方法。
背景技术:
1、利用电子地图在地图上显示车辆位置,通常以标记点的形式展示,但在车辆极多的情况下,由于标记点太多,不仅影响观看,还会增加渲染时间,让客户端变得很卡。目前,一般采取的方法是将位置相近的车辆聚合为一个点,称之为车辆聚合。
2、现有的计算定位点聚合的原理是:通过初始指定n个聚类质心,而后按照“距离”来聚拢“相近”的数据点,而后重新计算新的质心,以此往复,不断迭代计算n个聚类点的质心,最终回归到n个聚类结果中。
3、但该计算定位点聚合方法存在以下几个问题:
4、(1)此为计算密集型算法,模型需要迭代很多次才能够完善,且大量的距离计算比较消耗cpu;
5、(2)若一组定位点连成串(类似于一条直线),则循环计算中,聚类质心不断后移,最终所有点均归为相近点,实际这组定位点头尾相差距离很远;
6、(3)不能解决重叠覆盖问题,且算法有一定的复杂度不利于集成。
技术实现思路
1、针对上述的缺陷,本发明的目的在于提供一种,一个定位点只需通过简单的公式计算一次,克服多次迭代与复杂的距离计算所引起的性能问题,计算速度得到巨大提升。同时,该方法解决了定位点连成串等因定位点分布而导致的计算结果不准确的问题。
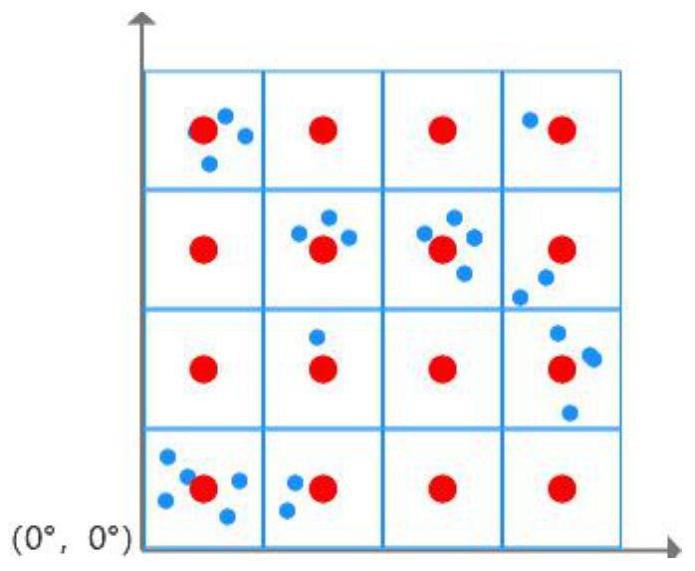
2、为了实现上述目的,本发明提供一种基于地图平面网格计算车辆位置聚合的方法,其特征在于,将地图范围划分成无数个长度为1比例尺的正方形网格,然后将1比例尺内的所有点聚合到该正方形的中心点;计算任意一点落在网格中的位置,并计算该网格的中心点。
3、优选的,任意一点落在网格中的位置以及该网格的中心点的计算步骤为:
4、步骤1,计算经度和纬度各相差一度代表的公里数;
5、步骤2,计算出1比例尺距离下所对应的经度差及纬度差;
6、步骤3,以经度0、纬度0为起点,以1比例尺距离为1网格边长,构建地图的网格坐标系;
7、步骤4,计算任意点落在网格的位置;
8、步骤5,计算该网格的中心点位置。
9、进一步地,步骤1中,在不同纬度下,当经度相差1度时的距离=111.319×cos(lat),其中,lat为纬度值;
10、赤道的修正系数为cos(0°)=1;
11、北极点的修正系数为cos(90°)=0;
12、极点经度相差的距离为0。
13、进一步地,步骤2中,经度差或纬度差=1比例尺距离/相差一度代表的公里数。
14、进一步地,步骤4中,计算任意点落在网格的位置,计算过程为:
15、首先,计算该点的经度是1网格边长所对应的经度差的多少整数倍,其所处网格数即为整数倍+1,整除无需+1;
16、然后,计算该点所处的横向的网格数:经度/1比例尺距离下所对应的经度差,结果向上取整;
17、最后,计算该点所处的纵向的网格数:纬度/1比例尺距离下所对应的纬度差,结果向上取整。
18、进一步地,步骤5,计算该网格的中心点位置:
19、经度=(横向网格数-0.5)×1比例尺距离下所对应的经度差
20、纬度=(横向网格数-0.5)×1比例尺距离下所对应的纬度差。
21、进一步地,步骤2中,1比例尺对应的经度差为△x,△x为a/(111.319×cos(lat));
22、1比例尺距离对应的纬度差为△y,△y为:a/111.319。
23、进一步地,步骤4中,计算车辆的位置点位落在第几个网格内:
24、
25、
26、lon为经度值,表示向上取值。
27、进一步地,步骤5中,取该网格的中心点经纬度,即聚合点的经纬度:
28、
29、
30、进一步地,完整的计算公式:
31、
32、
33、本发明提供一种基于地图平面网格计算车辆位置聚合的方法,采用此方法不仅运算速度快,每个原始点只需要计算一次,没有复杂的距离计算;而且根据纬度变化计算1比例尺对应的经度差,计算出聚合点的范围更精确。
技术特征:1.一种基于地图平面网格计算车辆位置聚合的方法,其特征在于,将地图范围划分成无数个长度为1比例尺的正方形网格,然后将1比例尺内的所有点聚合到该正方形的中心点;计算任意一点落在网格中的位置,并计算该网格的中心点。
2.根据权利要求1所述的一种基于地图平面网格计算车辆位置聚合的方法,其特征在于,任意一点落在网格中的位置以及该网格的中心点的计算步骤为:
3.根据权利要求2所述的一种基于地图平面网格计算车辆位置聚合的方法,其特征在于,步骤1中,在不同纬度下,当经度相差1度时的距离=111.319×cos(lat),其中,lat为纬度值;
4.根据权利要求2所述的一种基于地图平面网格计算车辆位置聚合的方法,其特征在于,步骤2中,经度差或纬度差=1比例尺距离/相差一度代表的公里数。
5.根据权利要求2所述的一种基于地图平面网格计算车辆位置聚合的方法,其特征在于,步骤4中,计算任意点落在网格的位置,计算过程为:
6.根据权利要求2所述的一种基于地图平面网格计算车辆位置聚合的方法,其特征在于,步骤5,计算该网格的中心点位置:
7.根据权利要求6所述的一种基于地图平面网格计算车辆位置聚合的方法,其特征在于,步骤2中,1比例尺对应的经度差为△x,△x为a/(111.319×cos(lat));
8.根据权利要求7所述的一种基于地图平面网格计算车辆位置聚合的方法,其特征在于,步骤4中,计算车辆的位置点位落在第几个网格内:
9.根据权利要求8所述的一种基于地图平面网格计算车辆位置聚合的方法,其特征在于,步骤5中,取该网格的中心点经纬度,即聚合点的经纬度:
10.根据权利要求9所述的一种基于地图平面网格计算车辆位置聚合的方法,其特征在于,完整的计算公式:
技术总结本发明涉及智能交通技术领域,具体为一种基于地图平面网格计算车辆位置聚合的方法,将地图范围划分成无数个长度为1比例尺的正方形网格,然后将1比例尺内的所有点聚合到该正方形的中心点;计算任意一点落在网格中的位置,并计算该网格的中心点。本发明提供一种基于地图平面网格计算车辆位置聚合的方法,采用此方法不仅运算速度快,每个原始点只需要计算一次,没有复杂的距离计算;而且根据纬度变化计算1比例尺对应的经度差,计算出聚合点的范围更精确。技术研发人员:马伯乔,尹恒星,温佳泽,黄河受保护的技术使用者:无锡坦程物联网股份有限公司技术研发日:技术公布日:2024/5/12本文地址:https://www.jishuxx.com/zhuanli/20240731/186197.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表