V2X城市路口车辆轨迹校正方法、装置及计算机设备与流程
- 国知局
- 2024-07-31 20:34:17
本发明涉及车辆轨迹校正方法,更具体地说是指v2x城市路口车辆轨迹校正方法、装置及计算机设备。
背景技术:
1、v2x是指车对外界的信息交换,车联网通过整合全球定位系统导航技术、车对车交流技术、无线通信及远程感应技术奠定了新的汽车技术发展方向,实现了手动驾驶和自动驾驶的兼容。
2、由于在城市道路中高楼、建筑物、桥梁等城市结构物会阻挡和遮挡 gps信号,导致信号的反射、衰减或丢失,从而影响了接收器的准确性,即使使用差分定位,城市环境下的高楼、建筑物等结构物也可能会继续对gps信号造成一定程度的阻碍和干扰,从而使得现有的v2x车辆差分定位也可能存在局限性。导致现有的v2x车辆在城市路口存在轨迹偏差的问题。
3、因此,有必要设计一种新的方法,实现解决现有的v2x车辆在城市路口存在轨迹偏差的问题。
4、
技术实现思路
1、本发明的目的在于克服现有技术的缺陷,提供v2x城市路口车辆轨迹校正方法、装置及计算机设备。
2、为实现上述目的,本发明采用以下技术方案:v2x城市路口车辆轨迹校正方法,包括:
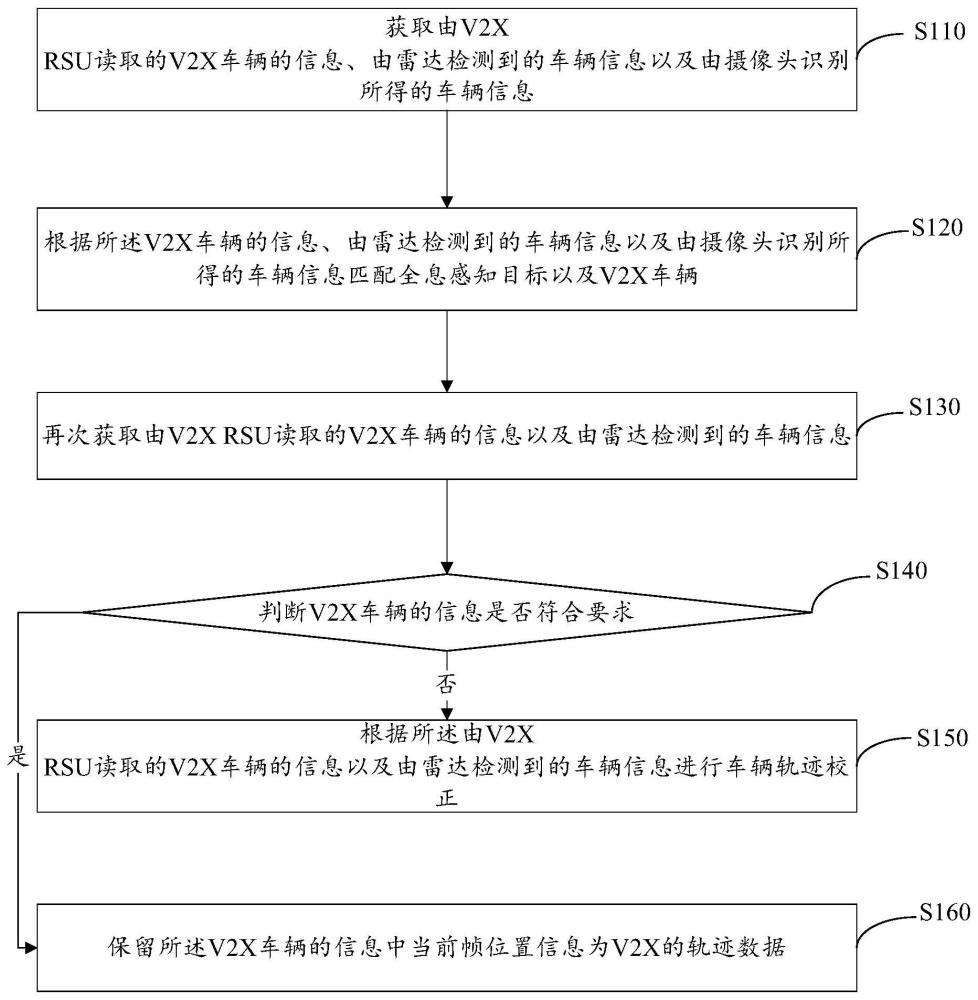
3、获取由v2xrsu读取的v2x车辆的信息、由雷达检测到的车辆信息以及由摄像头识别所得的车辆信息;
4、根据所述v2x车辆的信息、由雷达检测到的车辆信息以及由摄像头识别所得的车辆信息匹配全息感知目标以及v2x车辆;
5、再次获取由v2xrsu读取的v2x车辆的信息以及由雷达检测到的车辆信息;
6、判断v2x车辆的信息是否符合要求;
7、若v2x车辆的信息不符合要求,则根据所述由v2xrsu读取的v2x车辆的信息以及由雷达检测到的车辆信息进行车辆轨迹校正。
8、其进一步技术方案为:所述根据所述v2x车辆的信息、由雷达检测到的车辆信息以及由摄像头识别所得的车辆信息匹配全息感知目标以及v2x车辆,包括:
9、判断由雷达检测到的车辆信息与由摄像头识别所得的车辆信息是否匹配;
10、若由雷达检测到的车辆信息与由摄像头识别所得的车辆信息匹配,则判断所述v2x车辆的信息与由摄像头识别所得的车辆信息是否匹配;
11、若所述v2x车辆的信息与由摄像头识别所得的车辆信息匹配,则记录全息感知目标以及v2x车辆匹配。
12、其进一步技术方案为:所述记录全息感知目标以及v2x车辆匹配,包括:
13、将由雷达检测到的车辆信息所形成的雷达轨迹与所述v2x车辆匹配。
14、其进一步技术方案为:所述判断v2x车辆的信息是否符合要求,包括:
15、判断所述v2x车辆的信息中当前帧位置信息与上一帧位置信息的差值是否大于设定阈值;
16、若所述v2x车辆的信息中当前帧位置信息与上一帧位置信息的差值大于设定阈值,则确定v2x车辆的轨迹数据不符合要求。
17、其进一步技术方案为:所述根据所述由v2xrsu读取的v2x车辆的信息以及由雷达检测到的车辆信息进行车辆轨迹校正,包括:
18、使用由雷达检测到的车辆信息所对应的位置作为v2x车辆当前帧的位置信息,以校正v2x车辆的轨迹数据。
19、其进一步技术方案为:所述判断v2x车辆的信息是否符合要求之后,还包括:
20、若v2x车辆的信息符合要求,则保留所述v2x车辆的信息中当前帧位置信息为v2x的轨迹数据。
21、本发明还提供了v2x城市路口车辆轨迹校正装置,包括:
22、获取单元,用于获取由v2xrsu读取的v2x车辆的信息、由雷达检测到的车辆信息以及由摄像头识别所得的车辆信息;
23、匹配单元,用于根据所述v2x车辆的信息、由雷达检测到的车辆信息以及由摄像头识别所得的车辆信息匹配全息感知目标以及v2x车辆;
24、再次获取单元,用于再次获取由v2xrsu读取的v2x车辆的信息以及由雷达检测到的车辆信息;
25、判断单元,用于判断v2x车辆的信息是否符合要求;
26、校正单元,用于若v2x车辆的信息不符合要求,则根据所述由v2xrsu读取的v2x车辆的信息以及由雷达检测到的车辆信息进行车辆轨迹校正。
27、其进一步技术方案为:所述匹配单元包括:
28、第一判断子单元,用于判断由雷达检测到的车辆信息与由摄像头识别所得的车辆信息是否匹配;
29、第二判断子单元,用于若由雷达检测到的车辆信息与由摄像头识别所得的车辆信息匹配,则判断所述v2x车辆的信息与由摄像头识别所得的车辆信息是否匹配;
30、记录子单元,用于若所述v2x车辆的信息与由摄像头识别所得的车辆信息匹配,则记录全息感知目标以及v2x车辆匹配。
31、其进一步技术方案为:所述记录子单元,用于将由雷达检测到的车辆信息所形成的雷达轨迹与所述v2x车辆匹配。
32、本发明还提供了一种计算机设备,所述计算机设备包括存储器及处理器,所述存储器上存储有计算机程序,所述处理器执行所述计算机程序时实现上述的方法。
33、本发明与现有技术相比的有益效果是:本发明通过在v2x路过全息感知路口时,采用雷达、摄像头以及v2xrsu所获取的信息进行匹配,以确定v2x车辆所对应的雷达检测的车辆信息,即v2x车辆所对应的雷达检测的位置信息,再次获取雷达以及v2xrsu所获取的信息,当v2xrsu所获取的信息出现较大波动时,采用雷达检测的车辆信息进行轨迹校正,实现解决现有的v2x车辆在城市路口存在轨迹偏差的问题。
34、下面结合附图和具体实施例对本发明作进一步描述。
35、
技术特征:1.v2x城市路口车辆轨迹校正方法,其特征在于,包括:
2.根据权利要求1所述的v2x城市路口车辆轨迹校正方法,其特征在于,所述根据所述v2x车辆的信息、由雷达检测到的车辆信息以及由摄像头识别所得的车辆信息匹配全息感知目标以及v2x车辆,包括:
3.根据权利要求2所述的v2x城市路口车辆轨迹校正方法,其特征在于,所述记录全息感知目标以及v2x车辆匹配,包括:
4.根据权利要求1所述的v2x城市路口车辆轨迹校正方法,其特征在于,所述判断v2x车辆的信息是否符合要求,包括:
5.根据权利要求4所述的v2x城市路口车辆轨迹校正方法,其特征在于,所述根据所述由v2xrsu读取的v2x车辆的信息以及由雷达检测到的车辆信息进行车辆轨迹校正,包括:
6.根据权利要求4所述的v2x城市路口车辆轨迹校正方法,其特征在于,所述判断v2x车辆的信息是否符合要求之后,还包括:
7.v2x城市路口车辆轨迹校正装置,其特征在于,包括:
8.根据权利要求7所述的v2x城市路口车辆轨迹校正装置,其特征在于,所述匹配单元包括:
9.根据权利要求8所述的v2x城市路口车辆轨迹校正装置,其特征在于,所述记录子单元,用于将由雷达检测到的车辆信息所形成的雷达轨迹与所述v2x车辆匹配。
10.一种计算机设备,其特征在于,所述计算机设备包括存储器及处理器,所述存储器上存储有计算机程序,所述处理器执行所述计算机程序时实现如权利要求1至6中任一项所述的方法。
技术总结本发明实施例公开了V2X城市路口车辆轨迹校正方法、装置及计算机设备。所述方法包括:获取由V2XRSU读取的V2X车辆的信息、由雷达检测到的车辆信息以及由摄像头识别所得的车辆信息;根据所述V2X车辆的信息、由雷达检测到的车辆信息以及由摄像头识别所得的车辆信息匹配全息感知目标以及V2X车辆;再次获取由V2XRSU读取的V2X车辆的信息以及由雷达检测到的车辆信息;判断V2X车辆的信息是否符合要求;若V2X车辆的信息不符合要求,则根据所述由V2XRSU读取的V2X车辆的信息以及由雷达检测到的车辆信息进行车辆轨迹校正。通过实施本发明实施例的方法可实现解决现有的V2X车辆在城市路口存在轨迹偏差的问题。技术研发人员:杜水荣,李博塬,周正锦,张成,韦锦裕,杨文平,张瑞芳受保护的技术使用者:深圳市金溢科技股份有限公司技术研发日:技术公布日:2024/5/29本文地址:https://www.jishuxx.com/zhuanli/20240731/186932.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表