基于方向划分的船舶交通流提取方法
- 国知局
- 2024-07-31 20:36:33
本发明涉及算法提取水域内船舶信息可视化,具体涉及一种基于方向划分的船舶交通流提取方法。
背景技术:
1、船舶交通流可视化利用可视化技术帮助人们探索、理解和分析数据,是一种把复杂的信息以直观形象的方式呈现出来并快速被人理解的手段。通过对船舶交通流的可视化分析,可直观地考察船舶交通流的分布规律、探究交通信息中隐藏的船舶行为模式,为水上交通安全监管和交通规划提供决策支持。
2、在船舶航行中,水域内整体态势并不能全面获取,很大程度上,船舶在水域内航行需要依赖于主管机关的协调以及驾驶员的应变能力,驾驶员在进入航行水域中后,往往不能充分了解到水域内的船舶航行规律,对于水域内航行的船舶,如何快速安全的通过水域是船舶驾驶员所关心的问题。
技术实现思路
1、本发明提供了一种基于方向划分的船舶交通流提取方法,以克服上述问题。
2、为了实现上述目的,本发明的技术方案是:
3、一种基于方向划分的船舶交通流提取方法,包括:
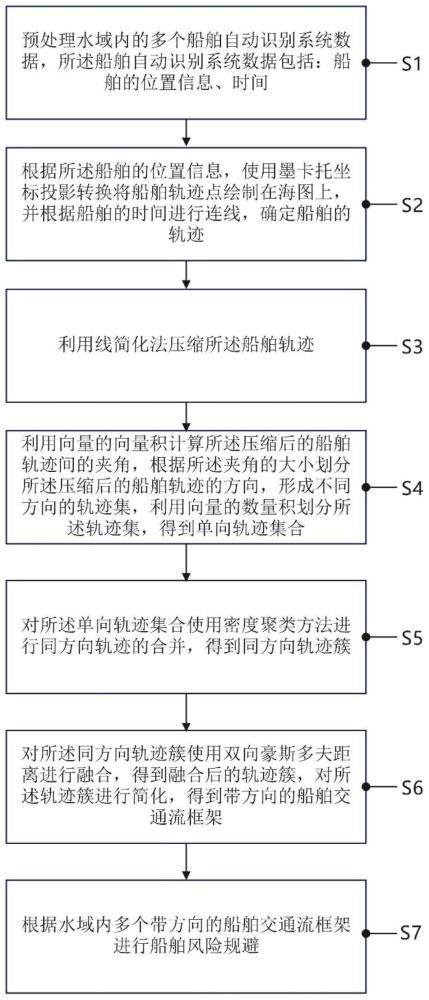
4、s1:预处理水域内的多个船舶自动识别系统数据,所述船舶自动识别系统数据包括:船舶的位置信息、时间;
5、s2:根据所述船舶的位置信息,使用墨卡托坐标投影转换将船舶轨迹点绘制在海图上,并根据船舶的时间进行连线,确定船舶的轨迹;
6、s3:利用线简化法压缩所述船舶轨迹;
7、s4:利用向量的向量积计算所述压缩后的船舶轨迹间的夹角,根据所述夹角的大小划分所述压缩后的船舶轨迹的方向,形成不同方向的轨迹集,利用向量的数量积划分所述轨迹集,得到单向轨迹集合;
8、s5:对所述单向轨迹集合使用密度聚类方法进行同方向轨迹的合并,得到同方向轨迹簇;
9、s6:对所述同方向轨迹簇使用双向豪斯多夫距离进行融合,得到融合后的轨迹簇,对所述轨迹簇进行简化,得到带方向的船舶交通流框架;
10、s7:根据水域内多个带方向的船舶交通流框架进行船舶风险规避。
11、进一步的,利用线简化法压缩所述船舶轨迹,包括:
12、连接船舶的起始点和终点获取船舶的基线;
13、计算船舶轨迹中所有点到所述基线的距离;
14、选取所有点到所述基线的距离的最大值,以船舶位置点为圆心,将半径作为所设置的阈值,将所述最大值与阈值进行比较,若小于阈值,则用基线代替原船舶轨迹,只保留船舶的起始点和终点,若大于阈值,则将所述最大值对应的点确定为第一转向点;
15、将所述第一转向点与所述起始点、所述终点进行连接,再次获取基线;
16、重复上述阈值的比较过程,获取多个船舶的转向点,将转向点连接,得到压缩后的船舶轨迹;
17、所述所有点到所述基线的距离的最大值的计算公式如(1)所示,
18、
19、其中,d表示所述所有点到所述基线的距离的最大值,(x1,y1)为所述船舶起始点的坐标,(x7,y7)为所述船舶终点的坐标,(x3,y3)为所述第一转向点的坐标。
20、进一步的,利用向量的向量积计算所述压缩后的船舶轨迹间的夹角,根据所述夹角的大小划分所述压缩后的船舶轨迹的方向,形成不同方向的轨迹集,利用向量的数量积划分所述轨迹集,得到单向轨迹集合,包括:
21、确定两个船舶轨迹段首尾点坐标,计算轨迹段向量,如公式(2)、(3)所示,
22、
23、
24、其中,a、b表示一个轨迹段的首尾点,(x1,y1)为a点坐标,(x2,y2)为b点坐标,c、d表示另一个轨迹的首尾点,(x3,y3)为c点坐标,(x4,y4)为d点坐标;
25、利用向量积公式判断向量间夹角,如公式(4)所示,
26、
27、其中,l1表示一条轨迹段,l2表示另外一条轨迹段,θ表示轨迹段之间的夹角;
28、利用向量的数量积公式对划分方向后的轨迹段进行初步的单向轨迹的集合,如公式(5)所示,
29、
30、其中,表示两向量间的夹角。
31、进一步的,对所述单向轨迹集合使用密度聚类方法进行同方向轨迹的合并,得到同方向轨迹簇,包括:
32、计算所述单向轨迹集合每一段轨迹的长度;
33、选取一段轨迹段作为初始轨迹段,计算所述轨迹段中点坐标,作为初始点坐标;
34、计算所述单向轨迹集合中其他轨迹段的中点坐标,计算所述初始点到所述其他轨迹段的中点的欧式距离;
35、计算轨迹段首端连线距离与末端连线距离之和,设置所述轨迹段首端连线距离与末端连线距离之和的权重,将所述轨迹段首端连线距离与末端连线距离之和与权重进行相乘,得到相乘后的距离值;
36、将所述欧式距离与所述相乘后的距离值进行比较,若所述欧式距离大于相乘后的距离值,则选择新的初始轨迹段,计算新的中点坐标,计算所述新的中点到所述其他轨迹段的中点的欧式距离;若所述欧式距离小于所述相乘后的距离值,则将所述轨迹段归为一个轨迹簇;
37、设置所述轨迹簇中轨迹段数量的阈值,将所述轨迹簇中的轨迹段数量与所述阈值进行比较,若所述轨迹簇中的轨迹段数量小于所述阈值,则所述轨迹簇中的轨迹段为噪声轨迹段,舍弃不用,若所述轨迹簇中的轨迹段数量大于所述阈值,则得到同方向的轨迹簇;
38、所述初始点到所述其他轨迹段的中点的欧式距离的公式如(6)所示,
39、
40、其中,e表示欧式距离,(xi,yi)表示初始轨迹段中点的坐标,(xj,yj)表示其他轨迹段中点的坐标。
41、进一步的,对所述同方向轨迹簇使用双向豪斯多夫距离进行融合得到融合后的轨迹簇,对所述轨迹簇进行简化,得到带方向的船舶交通流框架,包括:
42、选取同方向的轨迹簇,计算所述同方向轨迹簇之间的双向豪斯多夫距离,如公式(7)、(8)所示,
43、h(a,b)=max{h(a,b),h(b,a)} (7)
44、其中,a和b表示同方向轨迹簇,h(a,b),h(b,a)表示所述同方向轨迹簇的单向豪斯多夫距离,如公式(8)、(9)所示,
45、
46、
47、其中,‖a-b‖表示点a到点b的欧式距离;
48、比较所述同方向轨迹簇之间的双向豪斯多夫距离,将同方向轨迹簇之间最小的双向豪斯多夫距离的两类轨迹簇进行融合,得到融合后的轨迹簇;
49、比较所述同方向轨迹簇之间的双向豪斯多夫距离,不需要进行融合的同方向轨迹簇沿该方向两端的边界点进行连接,得到简化后的单向单条轨迹;
50、所述融合后的轨迹簇中的两类轨迹簇的方向与角度保持一致,两轨迹簇分别表示来向和去向,将所述融合后的轨迹簇沿该方向两端的边界点进行连接,得到简化后的双向轨迹;
51、选取简化融合后的所述单向轨迹和双向轨迹的首尾方向进行连接,获取船舶在水域内的交通流框架。
52、本发明通过线简化法压缩所述船舶轨迹,利用向量的向量积计算所述船舶轨迹的夹角,并根据夹角的大小将船舶轨迹划分出不同的方向,将带方向的船舶轨迹使用密度聚类进行合并,并使用双向豪斯多夫距离进行轨迹融合,对聚类和融合后的轨迹进行简化,得到单向轨迹和双向轨迹,连接简化后的轨迹得到带方向的船舶交通流框架,根据水域内多个带方向的船舶交通流框架进行船舶风险规避,能够掌握出一段时间内水域中船舶的航行规律并能够显示水域内船舶的行进方向,解决了以往船舶交通流框架没有方向的问题,为船舶在水域内的速度控制以及路径选择提供决策支持,为驾驶员提供航行建议,以及为主管机关在规划航道时提供整体的船舶航行情况。
本文地址:https://www.jishuxx.com/zhuanli/20240731/187081.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表