生成和更新无人飞行器的可飞行领空的处理的制作方法
- 国知局
- 2024-07-31 20:36:30
背景技术:
1、无人载具也可以被称为自主载具(autonomous vehicle),是能够在没有物理上存在的人类操作员的情况下行进的载具。无人载具可以在远程控制模式、自主模式或部分自主模式中操作。
2、当无人载具以远程控制模式操作时,位于远程位置的飞行员或驾驶员可以通过经由无线链路发送到无人载具的命令来控制无人载具。当无人载具以自主模式操作时,无人载具通常基于预编程的导航航路点(waypoint)、动态自动化系统或这些的组合来移动。此外,一些无人载具可以以远程控制模式和自主模式两者操作,并且在一些情况下可以同时这样做。例如,作为示例,远程飞行员或驾驶员可能希望将导航交托给自主系统,同时手动执行另一任务,诸如操作用于接载对象的机械系统。
3、存在用于各种不同环境的各种类型的无人载具。例如,存在用于在空中、地面、水下和太空中操作的无人载具。无人飞行器(uav)的示例包括四旋翼飞机(quad-copters)和立式起落uav。也存在用于混合操作的无人载具,其中,在混合操作中,多环境操作是可能的。混合无人载具的示例包括能够在陆地和水上进行操作的两栖船(amphibious craft)或能够在水上和陆地上着陆的水上飞机。其他示例也是可能的。
技术实现思路
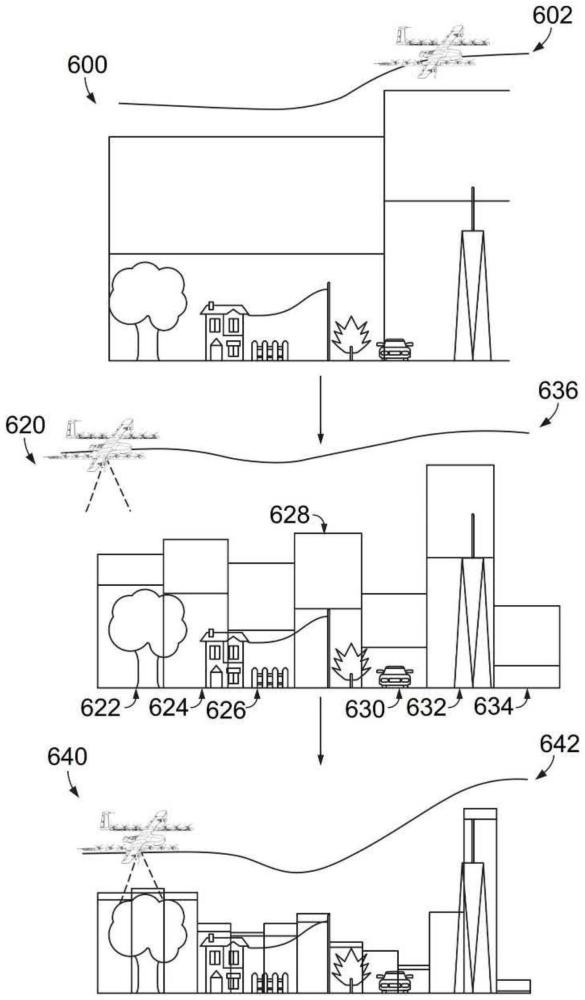
1、本文公开的示例包括用于生成和更新uav的可飞行领空的系统和方法。可以基于区域的数字表面模型(dsm)来确定uavs的路线。更具体地,可以通过确定环境表面的海拔的置信度值和多个网格单元中的每个网格单元处的相关联的地形间距值来确定路线。
2、在一个实施例中,提供了一种方法。该方法包括接收用于无人飞行器(uav)导航的区域的数字表面模型,其中数字表面模型表示区域中的环境表面。该方法还包括对于区域中的多个网格单元中的每个网格单元确定网格单元处环境表面的海拔的置信度值。该方法还包括:对于区域中的多个网格单元中的每个网格单元,至少基于该网格单元处环境表面的海拔的置信度值来确定地形间距值。该方法另外包括确定uav通过该区域的路线,使得uav的海拔在路线的网格单元序列中的每个网格单元处比环境表面的海拔高至少为该网格单元确定的地形间距值。该方法还包括使uav使用所确定的路线导航通过该区域。
3、在另一实施例中,提供了一种计算设备。计算设备被配置为接收用于无人飞行器(uav)导航的区域的数字表面模型,其中数字表面模型表示区域中的环境表面。计算设备还被配置为对于区域中的多个网格单元中的每个网格单元确定该网格单元处环境表面的海拔的置信度值。计算设备还被配置为对于区域中的多个网格单元中的每个网格单元,至少基于该网格单元处环境表面的海拔的置信度值来确定地形间距值。计算设备另外被配置为确定uav通过该区域的路线,使得uav的海拔在路线的网格单元序列中的每个网格单元处比环境表面的海拔高至少为该网格单元确定的地形间距值。计算设备还被配置为由计算设备向uav发送uav的路线。
4、在另一实施例中,提供了一种无人飞行器(uav)。uav被配置为接收用于无人飞行器(uav)导航的区域的数字表面模型,其中数字表面模型表示区域中的环境表面。所述uav还被配置为:对于区域中的多个网格单元中的每个网格单元,确定在该网格单元处环境表面的海拔的置信度值。uav还被配置为对于区域中的多个网格单元中的每个网格单元,至少基于该网格单元处环境表面的海拔的置信度值来确定地形间距值。uav另外被配置为确定uav通过该区域的路线,使得uav的海拔在路线的网格单元序列中的每个网格单元处比环境表面的海拔高至少为该网格单元确定的地形间距值。uav还被配置为使用所确定的路线导航通过该区域。
5、在另一实施例中,提供了一种系统。该系统包括一个或多个处理器、非暂时性计算机可读介质和存储在非暂时性计算机可读介质上的程序指令。程序指令可由一个或多个处理器执行以接收用于无人飞行器(uav)导航的区域的数字表面模型,其中数字表面模型表示区域中的环境表面。程序指令可由一个或多个处理器执行以对于区域中的多个网格单元中的每个网格单元确定该网格单元处环境表面的海拔的置信度值。程序指令可由一个或多个处理器执行,以对于区域中的多个网格单元中的每个网格单元,至少基于该网格单元处环境表面的海拔的置信度值来确定地形间距值。程序指令可由一个或多个处理器执行以确定uav通过该区域的路线,使得uav的海拔在路线的网格单元序列中的每个网格单元处比环境表面的海拔高至少为该网格单元确定的地形间距值。程序指令可由一个或多个处理器执行以使uav使用所确定的路线导航通过该区域。
6、在另一实施例中,提供了一种非暂时性计算机可读介质。非暂时性计算机可读介质中存储有可由一个或多个处理器执行以使计算系统执行功能的指令。功能包括接收用于无人飞行器(uav)导航的区域的数字表面模型,其中数字表面模型表示区域中的环境表面。所述功能还包括对于区域中的多个网格单元中的每个网格单元确定在该网格单元处环境表面的海拔的置信度值。所述功能还包括:对于区域中的多个网格单元中的每个网格单元,至少基于在该网格单元处环境表面的海拔的置信度值来确定地形间距值。功能还包括确定uav通过该区域的路线,使得uav的海拔在路线的网格单元序列中的每个网格单元处比环境表面的海拔高至少为该网格单元确定的地形间距值。功能还包括使uav使用所确定的路线导航通过该区域。
7、在另一实施例中,提供了一种系统。该系统包括用于接收用于无人飞行器(uav)导航的区域的数字表面模型的部件,其中数字表面模型表示区域中的环境表面。该系统还包括用于对于区域中的多个网格单元中的每个网格单元确定该网格单元处环境表面的海拔的置信度值的部件。该系统还包括用于对于区域中的多个网格单元中的每个网格单元至少基于该网格单元处环境表面的海拔的置信度值来确定地形间距值的部件。该系统另外包括用于确定uav通过该区域的路线的部件,使得uav的海拔在路线的网格单元序列中的每个网格单元处比环境表面的海拔高至少为该网格单元确定的地形间距值。该系统还包括用于使uav使用所确定的路线导航通过该区域的部件。
8、通过在适当的情况下参考附图阅读以下详细描述,这些以及其他方面、优点和替代方案对于本领域普通技术人员将变得显而易见。此外,应当理解,在本技术实现要素:部分和本文件中其他地方提供的描述旨在通过示例而非限制的方式说明所要求保护的主题。
技术特征:1.一种方法,包括:
2.根据权利要求1所述的方法,其中,确定每个网格单元的置信度值包括将置信度值初始设置为默认低置信度值,其中,确定每个网格单元的地形间距值包括至少基于该网格单元的默认低置信度值将所述地形间距值初始设置为默认高地形间距值。
3.根据权利要求1所述的方法,其中,所述区域中的多个网格单元中的每个网格单元与最后更新的时间戳相关联,其中,确定每个网格单元的置信度值基于该网格单元的最后更新的时间戳。
4.根据权利要求3所述的方法,其中,基于该网格单元的最后更新的时间戳来确定每个网格单元的置信度值包括:确定置信度值,使得具有更早时间戳的网格单元比具有更晚时间戳的网格单元具有更低的置信度值和更高的地形间距值。
5.根据权利要求1所述的方法,其中,确定每个网格单元的置信度值包括:
6.根据权利要求1所述的方法,其中,确定每个网格单元的置信度值包括:
7.根据权利要求1所述的方法,其中,确定每个网格单元的置信度值包括:
8.根据权利要求1所述的方法,其中,所述方法还包括:
9.根据权利要求1所述的方法,其中,确定每个网格单元的地形间距值包括:
10.根据权利要求9所述的方法,其中,确定每个网格单元的地形间距值还包括:
11.根据权利要求9所述的方法,其中,统计分布是累积分布函数。
12.根据权利要求1所述的方法,还包括:
13.根据权利要求1所述的方法,还包括:
14.根据权利要求1所述的方法,还包括:
15.根据权利要求14所述的方法,还包括:
16.根据权利要求1所述的方法,还包括:
17.根据权利要求1所述的方法,其中,确定一个或多个网格单元的地形间距值还基于与位于所述一个或多个网格单元处的对象相关联的监管高度。
18.根据权利要求1所述的方法,还包括:
19.根据权利要求1所述的方法,其中,确定uav通过所述区域的路线基于最小化总成本值,其中,总成本值包括基于网格单元序列中的每个网格单元处的置信度值的勘探效益分量。
20.根据权利要求1所述的方法,还包括:
21.一种计算设备,被配置为:
22.根据权利要求21所述的计算设备,其中,所述计算设备还被配置为:
23.一种无人飞行器(uav),被配置为:
技术总结一种方法包括接收用于无人飞行器(UAV)导航的区域的数字表面模型。数字表面模型表示该区域中的环境表面。该方法包括对于区域中的多个网格单元中的每个网格单元确定在该网格单元处环境表面的海拔的置信度值,以及至少基于在网格单元处环境表面的海拔的置信度值来确定地形间距值。该方法包括确定UAV通过该区域的路线,使得UAV的海拔在路线的网格单元序列中的每个网格单元处比环境表面的海拔高至少为网格单元确定的地形间距值。该方法包括使UAV使用所确定的路线导航通过该区域。技术研发人员:D·阿贝沃德纳,K·博兹科夫,K·卡克利吉安,S·雷西,S·巴龙,B·琼斯,A·昂德蒂,K·D·朱利安,S·B·亚拉曼奇受保护的技术使用者:WING航空有限责任公司技术研发日:技术公布日:2024/6/2本文地址:https://www.jishuxx.com/zhuanli/20240731/187076.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表