基于卫星数据多源融合的车路空间从属关系确定方法
- 国知局
- 2024-07-31 20:39:29
本发明属于交通控制领域,具体地,涉及一种基于卫星数据多源融合的车路空间从属关系确定方法。
背景技术:
1、随着卫星遥感技术的发展,遥感图像的分辨率和覆盖范围不断提高,越来越多的研究者开始利用遥感图像数据进行多学科领域的应用研究。在交通领域,利用遥感图像数据进行车辆识别,进而大范围感知城市路网交通状态的方法日益被研究者重视,能够帮助监测交通状况、分析道路使用情况和优化交通管控等。然而,对于道路识别,由于环境和特征复杂,导致车辆与道路空间从属关系难以准确判断。
2、车辆路段的从属关系包括:车辆的从属路段,车辆行驶方向,车辆行驶车道三个方面。现有基于遥感卫星图像识别车辆和提取道路的研究较多,但大多都是单一识别车辆或者单一提取道路,对于车辆和道路在空间上的从属关系研究较少。因此,有必要提供一种能够确定车路空间从属关系的方法。
技术实现思路
1、鉴于上述技术问题和缺陷,本发明的目的在于提供一种基于卫星数据多源融合的车路空间从属关系确定方法,该方法通过融合卫星遥感图像数据和已有数字路网数据信息来确定车辆和路段从属关系,在统计学意义上实现车辆和路段从属关系的确定,这对于大范围城市道路网络交通状态感知和交通管理控制等应用领域,具有现实意义。
2、为实现上述目的,本发明采用如下技术方案:
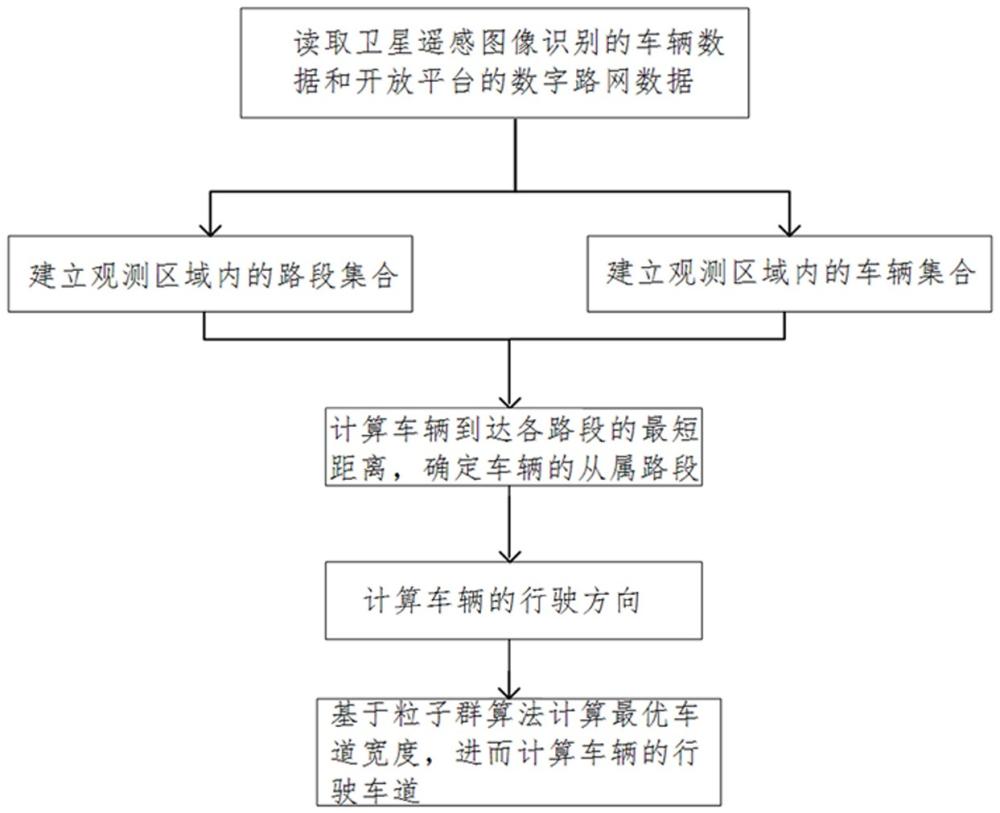
3、一种基于卫星数据多源融合的车路空间从属关系确定方法,该方法包括以下步骤:
4、步骤1.读取卫星遥感图像识别的车辆数据和开放平台的数字路网数据,建立观测区域内的车辆集合和路段集合;
5、观测区域内的车辆集合vc={v(1), v(2), ... , v(i), ..., v(p)},代表车辆集合vc中有p辆车,v(i)表示编号为i辆的车辆,v(p) 表示编号为p辆的车辆;v(i)=[i, pc,rj, pr, pr’, lk, d, dist],其中i表示车辆编号,pc表示车辆i的中心坐标,rj表示车辆i的从属路段的编号,lk表示车辆i的行驶车道编号, d表示车辆的行驶方向,pr和pr’表示从属路段中距离车辆最近线段的两个连接点的坐标,dist表示车辆i到路段中心线的最短距离;
6、观测区域内的路段集合rc={r(1), r(2), ... ,r(i), ..., r(n)},代表路段集合rc中有n条路段, r(i)表示一条编号为i的路段,r(n)表示一条编号为n的路段, r(i)={pr(1), pr(2), ..., pr(j), ..., pr(m)},代表路段r(i)由m个连接点顺序连接,其中pr(j)表示路段i上的第j个连接点的坐标,pr(m)表示路段i上的第m个连接点的坐标;
7、步骤2.根据车辆的中心坐标以及路段集合中各个路段的连接点坐标,计算车辆到达各路段的距离,确定车辆的从属路段,并将从属路段中距离车辆最近线段的两个连接点的坐标记为pr和pr’;
8、步骤3.计算车辆的行驶方向;
9、步骤3.1 计算车辆上下行方向超平面;
10、读取步骤2中计算得到的车辆v(i)=[i, pc, rj, pr, pr’, lk, d, dist]链表中的pr和pr’值,由pr和pr’确定超平面,超平面方程为:
11、w(i) x+b(i)=0
12、其中,w(i)为超平面的法向量,车辆位置pc和垂线垂足pr*构成超平面的法向量,垂线为车辆位置pc到pr和pr’构成的线段的最短距离 ,w(i)=[pr*,pc],方向由pr*指向pc;w和b的下标i表示超平面参数与车辆编号i所相应,x表示分析区域内的任意一个向量;
13、步骤3.2 判定车辆行驶方向;
14、将车辆v(i)的位置pc所确定的向量x(i),代入其对应的超平面方程中,记录超平面方程左侧的计算结果,如果是正值,则代表车辆沿其从属路段rj的连接点序列的逆序方向,反之,负值则代表车辆沿其从属路段rj的连接点序列的顺序方向;与逆序和顺序相应的,更新v(i)=[i, pc, rj, pr, pr’, lk, d, dist ]中的车辆行驶方向变量d的值为-1或者1;
15、步骤4.计算车辆的行驶车道;
16、步骤4.1.遍历车辆集合,搜索所有车辆v(i)= [i, pc, rj, pr, pr’, lk, d,dist ]数组中rj具有相同从属路段i值的车辆,构成车辆子集vc(i),vc(i)=[v(1), v(2),... , v(j), ..., v(q)],其中i表示子集中所有车辆都从属于路段r(i),q表示车辆子集中一共有q辆车辆;
17、步骤4.2.提取车辆子集vc(i)中所有车辆到路段中心线的最短距离dist,构成距离子集dist(i)=[dist(1), dist(2), ... , dist(j), ..., dist(q)],其中dist(j)表示第j辆车到路段中心线的最短距离;
18、步骤4.3. 以所有车辆最大程度接近路段中心线为车道宽度优化目标,基于粒子群算法计算最优车道宽度kn,根据kn值计算车辆的行驶车道数;
19、车道宽度kn的误差最小目标函数为:
20、min err(kn) = sigma(dist(i)- (round((dist(i)-b)/kn+0.5)-0.5)×kn)^2;
21、其中,kn在2.5到3.5米范围内取值,sigma为求和符号,表示对所有车辆导致的误差平方进行求和;b为中心隔离带宽度的一半,默认为0;round表示四舍五入取整函数;
22、车辆v(j)的行驶车道的计算公式如下:
23、v(j).lk = round(dist(i)/kn + 0.5)×d(j);
24、其中,d(j)表示车辆v(j)的行驶方向d值,根据行驶方向d(j)的值,lk值为正整数[1, 2, 3, ...],或负整数[-1, -2, -3, ...]。
25、作为本发明的优选,步骤1中路段r(i)数据的获取方式为:将open street map提供的对应所识别的卫星遥感图像范围内的道路矢量图形文件导出路网图层数据,从路网图层数据中提取道路中心线矢量数据,所述道路中心线矢量数据为构成道路中心线的折线序列,存储形式为折线端点的有序点集,所述折线端点为道路中心线的连接点。
26、作为本发明的优选,步骤1中车辆i的中心坐标和第j个连接点的坐标为经米制单位转换和旋转后使道路成水平和竖直状下的坐标。
27、作为本发明的优选,步骤2的具体步骤如下:
28、步骤2.1.遍历路段集合{r(1), r(2), ... ,r(i), ..., r(n)},对于选定的路段r(i),顺序遍历路段中的连接点,计算每个连接点和车辆v(j)位置pc之间的距离;
29、步骤2.2.比较车辆v(j)与路段r(i)中所有连接点的距离,寻找距离最小值对应的连接点,记为pri;
30、步骤2.3.在r(i)的有序点集中寻找连接点pri对应的前后两个连接点pri-1和pri+1,若pri的前后连接点只存在一个,则只考虑存在的连接点;将pri与pri-1和pri+1连接构成线段,计算车辆位置pc与构成的线段的距离,取最小值作为车辆v(j)到路段r(i)的距离,记为distji;
31、步骤2.4.比较由步骤2.3计算得到的路段集合中的所有路段与车辆v(j)之间对应的distji,从distji中选择最小值,作为车辆v(j)到路段中心线的最短距离dist的值,并把最小值对应的最短距离线段的所属路段编号rj记录为车辆的从属路段,并将从属路段中距离车辆最近线段的两个连接点的坐标记为pr和pr’。
32、作为本发明的优选,步骤4.3的具体步骤如下:
33、步骤4.3.1. 建立计算行驶车道宽度的误差最小目标函数;
34、步骤4.3.2. 采用粒子群算法计算最优kn值,粒子的初始位置限制在范围[2.5,3.5]内随机生成,粒子群数量设置为100,粒子移动速度设置为在每个迭代步长上可移动±0.01米, 最大迭代步数设置为200,学习因子设置为1.5,惯性权重设置为0.8;使用误差最小目标函数作为粒子适应度函数,迭代计算得到最优kn值;
35、步骤4.3.3. 根据最优kn值计算车辆的行驶车道。
36、本发明的优点和有益效果:
37、(1)本发明提供的方法将静态遥感图像识别后的车辆数据与开放平台的数字路网数据进行融合来判断车辆路段的从属关系,实现对车辆的从属路段,车辆行驶方向,车辆行驶车道的综合判断,该方法可以对车辆的行驶路径进行全面的跟踪和分析,从而对道路交通流有更准确的态势感知,有利于优化交通管控。
38、(2)本发明提供的方法综合考虑车辆与道路中心线距离以及车辆与车辆之间相对位置等信息,在无需测量车道宽度以及道路边界的情况下,实现对车辆行驶车道和行驶方向的判断,该方法对于大范围城市道路网络交通状态感知和交通管理控制等应用领域具有现实意义。
39、(3)本发明在统计意义上实现对车路空间从属关系的确定,且考虑道路上车辆的位置总是最大可能分布在车道的正中间,建立相应最小误差方程,采用粒子群算法对车辆的行驶车道进行判断。
40、(4)本发明提供的方法适应于不同类型的遥感图像和数字路网数据,具有一定的通用性和可扩展性,为城市交通管理等领域提供更多丰富信息和分析方法,具有较为广泛的应用前景和价值。
本文地址:https://www.jishuxx.com/zhuanli/20240731/187251.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表