基于FRENET坐标系特征的车辆轨迹模式识别方法
- 国知局
- 2024-07-31 21:20:02
本发明涉及智慧交通领域,更具体地说,涉及一种基于frenet坐标系特征的车辆轨迹模式识别方法。
背景技术:
1、近年来随着社会发展,机动车保有量快速提高,相应的交通事故率也有所提升,相关研究指出,不良行车行为是造成交通事故的主要原因之一,由于造成不良行车行为的原因种类较多,因此如何让进行高效、准确辨识出不良的行车行为成为了重点,随着传感器技术的高速发展,各种雷达和视频检测装置等设备均可获取时空分辨率较好的车辆轨迹点,高密度、长距离的行车轨迹数据可挖掘微观行车轨迹模式,目前已经有些通过轨迹挖掘来辨识行车行为相关的研究并取得了一定的成果。现有研究基本是针对轨迹的单维信息进行分析,并没有挖掘行车轨迹中的高维信息,无法分析轨迹信息的具体影响,同时由于部分车辆的异常轨迹难以定义,且数据采集精度要求较高,现有的车辆异常轨迹识别研究多是针对具体的违规行为,如逆行等。
技术实现思路
1、本发明要解决的技术问题在于,提供一种基于frenet坐标系特征的车辆轨迹模式识别方法,其通过结合现有的传感器技术可获取高密度、长距离的车辆轨迹数据,并实现对微观行车轨迹模式的深度挖掘和分析,识别更为广泛的车辆异常轨迹模式,提供更为全面的行车行为分析支持。
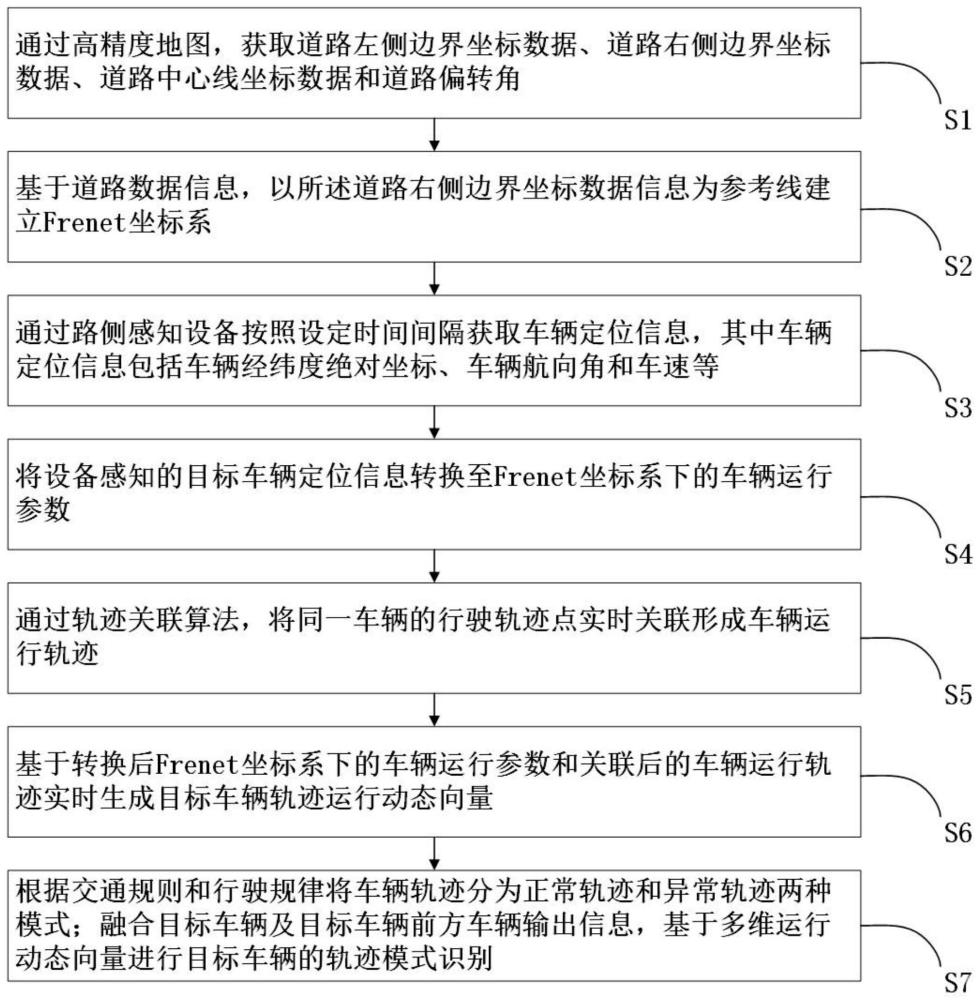
2、本发明解决其技术问题所采用的技术方案是:构造一种基于frenet坐标系特征的车辆轨迹模式识别方法,包括以下步骤:
3、s1、通过地图获取道路左侧边界坐标数据、道路右侧边界坐标数据、道路中心线坐标数据和道路偏转角;
4、s2、基于道路数据信息,以所述道路右侧边界坐标数据信息为参考线建立frenet坐标系;
5、s3、通过路侧感知设备按照设定时间间隔获取车辆定位信息;
6、s4、将设备感知的目标车辆定位信息转换至frenet坐标系下的车辆运行参数;
7、s5、通过轨迹关联算法,将同一车辆的行驶轨迹点实时关联形成车辆运行轨迹;
8、s6、基于转换后frenet坐标系下的车辆运行参数和关联后的车辆运行轨迹实时生成目标车辆轨迹运行动态向量;
9、s7、根据交通规则和行驶规律将车辆轨迹分为正常轨迹和异常轨迹两种模式。
10、按上述方案,所述步骤s1中,所述地图基于大地坐标系创建,获取坐标数据为经纬度绝对坐标。
11、按上述方案,所述步骤s2中,以道路右侧边界起点为原点,道路右侧边界为frenet坐标系纵轴进行建立。
12、按上述方案,所述步骤s3中,车辆定位信息包括车辆经纬度绝对坐标、车辆航向角和车速;路测感知设备包括微波雷达和激光雷达;感知设备设定的检测时间间隔设定为200~400ms。
13、按上述方案,所述步骤s4中,将设备感知的目标车辆定位信息转换至frenet坐标系下的车辆运行参数,具体为:
14、s401、根据标定点在感知设备坐标系和笛卡尔坐标系下的坐标和公式计算出坐标系偏转角;
15、s402、通过公式将感知设备坐标系下目标车辆坐标计算为笛卡尔坐标系下目标车辆坐标;
16、s403、根据转换公式将笛卡尔坐标系下目标车辆坐标通过转换公式转换为frenet坐标系下目标车辆坐标。
17、按上述方案,所述步骤s401中,所述笛卡尔坐标系的坐标原点根据车辆实际运行区域进行选定,选取运行起点为坐标原点,标定点则根据感知设备的检测范围进行选取,具体的计算公式和转换流程如下:
18、首先获取标定点和感知设备在笛卡尔坐标系下的坐标(m,n),(m0,n0)及标定点在感知设备坐标系下的坐标(m′,n′),通过公式:
19、
20、计算出坐标系偏转角θ值的大小,其中θ的范围为0-360°;根据上述公式及计算出的θ进行坐标转换,获取笛卡尔坐标系下检测点坐标(x,y),通过公式:
21、
22、计算出笛卡尔坐标系下检测点坐标(x,y),其中(x′,y′)为感知坐标系下检测点坐标;检索参考线上离(x,y)最近的参考点(xf,yf),其中xf即为检测点在frenet坐标系下的纵坐标s,参考点的道路偏转角为α,通过公式
23、
24、计算出检测点在frenet坐标系下的横坐标d,得到转换后frenet坐标系下检测点坐标(s,d)。
25、按上述方案,所述步骤s5中,通过轨迹关联算法,将同一车辆的行驶轨迹点实时关联形成车辆运行轨迹,具体为:
26、s501、根据转换后的目标车辆运行参数和目标车辆定位信息中的车辆航向角和车速计算出下一时刻该车辆的轨迹预测坐标;
27、s502、将目标车辆当前时刻坐标与前一时刻预测坐标进行比对,若|δs|<1,|δd|<0.5,则将当前坐标数据加入到目标车辆轨迹数据中,否则新建一条新的车辆轨迹数据库,将当前坐标数据加入至新建轨迹数据库中,其中δs和δd分别为frenet坐标系下相邻时刻纵坐标和横坐标的差值;
28、s503、将各个车辆轨迹点进行轨迹关联生成实时轨迹,并以si作为车辆轨迹点的序列对按照设定检测时间间隔进行编号,表示车辆轨迹的具体空间位置。
29、按上述方案,所述步骤s6中,基于转换后frenet坐标系下的车辆运行参数和关联后的车辆运行轨迹实时生成目标车辆轨迹运行动态向量为:
30、ao=(si,ti,x,y,vx,vy,dhw,thw,id)
31、式中:si为车辆轨迹点的序列对,根据设定检测时间间隔对目标车辆进行编号,表示车辆轨迹的具体空间位置;
32、ti为车辆行驶轨迹时间戳,由车辆轨迹序列对与设定检测时间间隔计算得出;
33、x、y分别为车辆横纵向行驶距离,由转换后frenet坐标系下车辆运行参数得出;
34、vx、vy分别为车辆横纵向行驶速度,由相邻序列对目标车辆横纵向行驶距离差值和设定检测时间间隔计算得出;
35、id为车辆所处车道编号,根据目标车辆横向行驶距离和实际车道宽度所决定,以车道最左右其中一侧车道为起始车道编号;目标车辆的正常换道行为通过车辆所处车道id编号所决定,dhw和thw分别为目标车辆与前车交互的位置信息包括车辆之间的车头间距和车头时距;其中
36、dhw=yf-yo
37、thw=dhw/voy
38、式中,yf为前车纵向行驶距离,yo为目标车辆纵向行驶距离,coy为目标车辆纵向行驶速度,若thw<1s,表明目标车辆与前车存在潜在碰撞风险,当目标车辆与前车的纵向距离超出设定距离时,则不显示目标车辆与前车之间的位置信息,设定dhw=∞,thw=∞。
39、按上述方案,所述步骤s7中,根据运行对象速度、方向的变化及交通法则和车辆运动规律,所述异常轨迹模式包括突然变速轨迹、运行停止轨迹、碰撞轨迹、逆向行驶轨迹和偏移道路轨迹五种;其中
40、
41、表明该异常轨迹为突然变速轨迹;
42、
43、表明该异常轨迹为运行停止轨迹;
44、|dnw|<4.5
45、表明该异常轨迹为碰撞轨迹;
46、xi-xi+1<0,i∈[1,n]
47、表明该异常轨迹为逆向行驶轨迹;
48、p{y<0∪y>d}=1
49、表明该异常轨迹为偏移道路轨迹,式中d为行驶道路实际宽度;
50、将目标车辆及目标车辆前车的多维运行动态向量融合,形成目标车辆的轨迹模式表达式如下:
51、t′i=(ao;af)
52、t′=(t′1,t′2,t′3,...,t′n),i∈[1,n]
53、式中:ao为目标车辆轨迹状态向量,af为目标车辆前方车辆轨迹状态向量;
54、通过所述轨迹模式表达式计算判定条件,确定目标车辆隶属于正常轨迹还是异常轨迹中。
55、实施本发明的基于frenet坐标系特征的车辆轨迹模式识别方法,具有以下有益效果:
56、本发明通过结合现有的传感器技术可获取高密度、长距离的车辆轨迹数据,并实现对微观行车轨迹模式的深度挖掘和分析,将传感器的感知信息转换计算并结合关联后的车辆运行轨迹构建车辆的高维轨迹信息模式并对其轨迹模式进行识别,相比现有研究针对具体车辆违规行为的识别,能够识别更为广泛的车辆异常轨迹模式,提供更为全面的行车行为分析支持,可适用于多种道路及车辆目标,较以往相关技术应用对象更广泛。
本文地址:https://www.jishuxx.com/zhuanli/20240731/189297.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表