车辆行驶数据记录方法、装置、电子设备及介质与流程
- 国知局
- 2024-07-31 22:19:12
本技术涉及导航技术,尤其涉及一种车辆行驶数据记录方法、装置、电子设备及介质。
背景技术:
1、车辆行驶数据记录的主要任务是收集车辆在道路的行驶轨迹、加速度、线速度和角速度,用户或厂商可以基于收集到的数据进行数据分析,以用于行为分析或产品改进等。
2、在已知技术中,一般车辆通过智能终端的全球导航卫星系统(global navigationsatellite system,gnss)定位功能获取行驶轨迹。但是,由于智能终端的gnss频率只有1hz,无法达到高速车辆的要求,因此需要专门的gnss接收机,该gnss接收机成本较高,且只能获取行驶轨迹,无法获取实时的加速度和角速度,不利于推广使用。基于前述内容,已知技术中又提出使用gnss和惯性测量单元(inertial measurement unit,imu)组合定位的方式来收集高速车辆的数据,即将gnss和imu数据通过卡尔曼滤波进行融合,具体的,本方式需要事先在实验室条件下测量出imu的误差,基于该imu的误差确定最终的定位数据。
3、由于imu的误差会随着温度、上电时间等因素变换,因此,采用事先测得的imu的误差最终确定定位数据,会导致定位精度不够高。
技术实现思路
1、本技术提供一种车辆行驶数据记录方法、装置、电子设备及介质,用以记录定位精度较高的定位数据。
2、一方面,本技术提供一种车辆行驶数据记录方法,应用于包含全球导航卫星系统gnss服务的终端设备,所述方法包括:
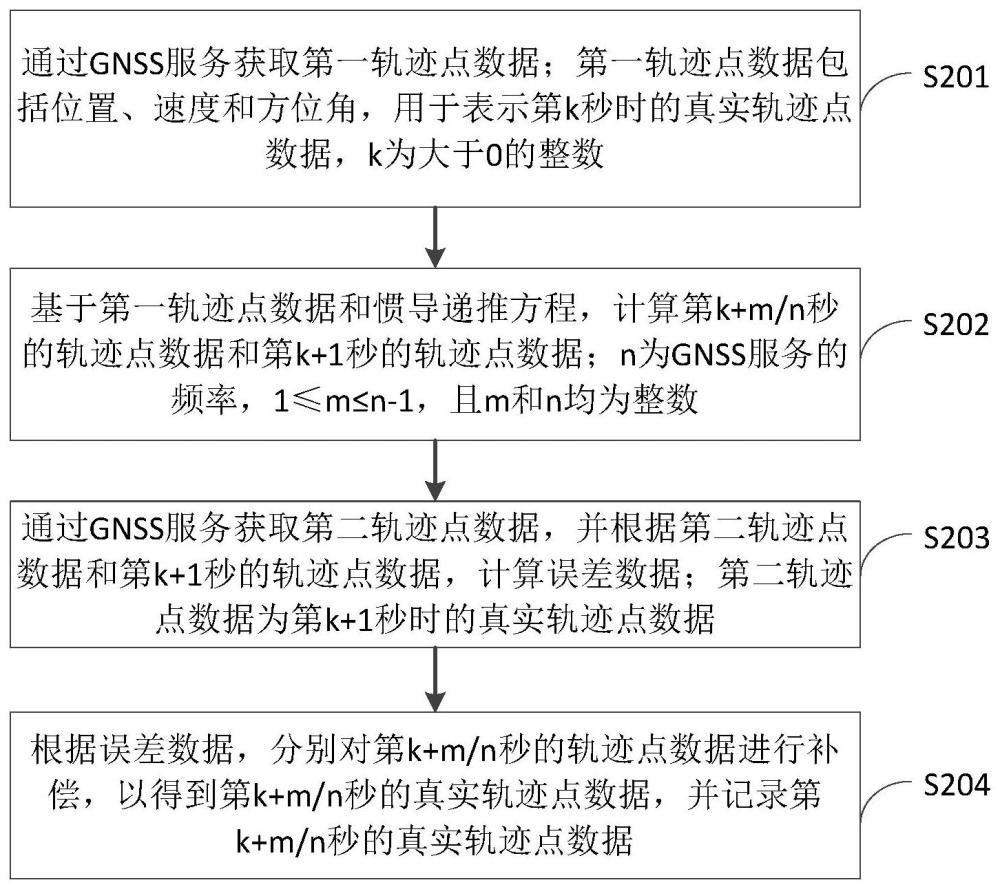
3、通过所述gnss服务获取第一轨迹点数据,所述第一轨迹点数据包括位置、速度和方位角,用于表示第k秒时的真实轨迹点数据,k为大于0的整数;
4、基于所述第一轨迹点数据和惯导递推方程,计算第k+m/n秒的轨迹点数据和第k+1秒的轨迹点数据;其中,n为所述gnss服务的频率,1≤m≤n-1,且m和n均为整数;
5、通过所述gnss服务获取第二轨迹点数据,并根据所述第二轨迹点数据和所述第k+1秒的轨迹点数据,计算误差数据;所述第二轨迹点数据为第k+1秒时的真实轨迹点数据;
6、根据所述误差数据,分别对所述第k+m/n秒的轨迹点数据进行补偿,以得到第k+m/n秒的真实轨迹点数据,并记录所述第k+m/n秒的真实轨迹点数据。
7、在另一种可能实现的方式中,所述基于所述第一轨迹点数据和惯导递推方程,计算第k+m/n秒的轨迹点数据和第k+1秒的轨迹点数据,包括:
8、基于所述第一轨迹点数据和所述惯导递推方程,计算第k+1/n秒的轨迹点数据,所述第k+1/n秒的轨迹点数据包括当前位置、当前速度和当前方位角;
9、在1至n-1范围内对m依次取整数值,执行如下步骤,直至m=n-1,得到第k+1秒的轨迹点数据:
10、基于所述惯导递推方程和所述第k+m/n秒的轨迹点数据,计算第k+(m+1)/n秒的轨迹点数据。
11、在另一种可能实现的方式中,所述根据所述误差数据,分别对所述第k+m/n秒的轨迹点数据进行补偿,包括:
12、获取所述第k+m/n秒的轨迹点数据的补偿系数,其中,所述补偿系数与m/n正相关;
13、基于所述补偿系数和所述误差数据,对所述k+m/n秒的轨迹点数据进行补偿。
14、在另一种可能实现的方式中,所述基于所述补偿系数和所述误差数据,对所述k+m/n秒的轨迹点数据进行补偿,包括:
15、将所述误差数据乘以第k+m/n秒的补偿系数,以得到第k+m/n秒的补偿数据;
16、将所述第k+m/n秒的补偿数据叠加至所述第k+m/n秒的轨迹点数据,以得到所述第k+m/n秒的真实轨迹点数据。
17、在另一种可能实现的方式中,所述惯导递推方程基于前一时刻的轨迹点数据,得到轨迹点数据变化量,并将所述轨迹点数据变化量叠加至所述前一时刻的轨迹点数据,得到当前时刻的轨迹点数据。
18、在另一种可能实现的方式中,所述补偿系数为m/n。
19、第二方面,本技术提供一种高速车辆位置数据记录装置,应用于包含全球导航卫星系统gnss服务的终端设备,所述装置包括:
20、获取模块,用于通过所述gnss服务获取第一轨迹点数据,所述第一轨迹点数据包括位置、速度和方位角,用于表示第k秒时的真实轨迹点数据,k为大于0的整数;
21、计算模块,用于基于所述第一轨迹点数据和惯导递推方程,计算第k+m/n秒的轨迹点数据和第k+1秒的轨迹点数据;其中,n为所述gnss服务的频率,1≤m≤n-1,且m和n均为整数;
22、所述计算模块,还用于通过所述gnss服务获取第二轨迹点数据,并根据所述第二轨迹点数据和所述第k+1秒的轨迹点数据,计算误差数据;所述第二轨迹点数据为第k+1秒时的真实轨迹点数据;
23、记录模块,用于根据所述误差数据,分别对第k+m/n秒的轨迹点数据进行补偿,以得到所述第k+m/n秒的真实轨迹点数据,并记录所述第k+m/n秒的真实轨迹点数据。
24、在另一种可能实现的方式中,所述计算模块具体用于:
25、基于所述第一轨迹点数据和所述惯导递推方程,计算第k+1/n秒的轨迹点数据,所述第k+1/n秒的轨迹点数据包括当前位置、当前速度和当前方位角;
26、在1至n-1范围内对m依次取整数值,执行如下步骤,直至m=n-1,得到第k+1秒的轨迹点数据:
27、基于所述惯导递推方程和所述第k+m/n秒的轨迹点数据,计算第k+(m+1)/n秒的轨迹点数据。
28、在另一种可能实现的方式中,所述记录模块具体用于:
29、获取所述第k+m/n秒的轨迹点数据的补偿系数,其中,所述补偿系数与m/n正相关;
30、基于所述补偿系数和所述误差数据,对所述k+m/n秒的轨迹点数据进行补偿。
31、在另一种可能实现的方式中,所述记录模块具体用于:
32、将所述误差数据乘以第k+m/n秒的补偿系数,以得到第k+m/n秒的补偿数据;
33、将所述第k+m/n秒的补偿数据叠加至所述第k+m/n秒的轨迹点数据,以得到所述第k+m/n秒的真实轨迹点数据。
34、在另一种可能实现的方式中,所述惯导递推方程基于前一时刻的轨迹点数据,得到轨迹点数据变化量,并将所述轨迹点数据变化量叠加至所述前一时刻的轨迹点数据,得到当前时刻的轨迹点数据。
35、在另一种可能实现的方式中,所述补偿系数为m/n。
36、第三方面,本技术提供一种电子设备,包括:至少一个处理器和存储器;
37、所述存储器存储计算机执行指令;
38、所述至少一个处理器执行所述存储器存储的计算机执行指令,使得所述至少一个处理器执行如上第一方面任一项所述的方法。
39、第四方面,本技术提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如上第一方面任一项所述的方法。
40、本技术提供一种高速车辆位置数据记录方法、装置、电子设备及介质,本技术的方法应用于包含gnss服务的终端设备,具体的,本技术的方法首先通过gnss服务获取第k秒时的真实轨迹点数据,然后基于该第k秒时的真实轨迹点数据和惯导递推方程,计算第k秒至第k+1秒之间时刻的轨迹点数据和第k+1秒的轨迹点数据,其中,第k秒至第k+1秒之间时刻为第k+m/n秒,m为大于等于1且小于等于n-1的整数。进一步的,终端设备根据计算出的第k+1秒的轨迹点数据和由gnss服务获取的第k+1秒时的真实轨迹点数据,计算误差数据。最后,基于误差数据分别对第k+m/n秒的轨迹点数据进行补偿,得到第k+m/n秒的真实轨迹点数据,并记录该数据。本技术的方法中,对于第k秒至第k+1秒间任一时刻的轨迹点数据,基于计算出的误差数据分别进行补偿,无需采用在实验室条件下测量出的特定的imu误差,从而有利于提升定位精度,使记录的数据更具可靠性和参考性。
本文地址:https://www.jishuxx.com/zhuanli/20240731/192783.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表