末端执行器和外科手术器械的制作方法
- 国知局
- 2024-08-05 11:53:39
本发明涉及一种末端执行器和外科手术器械,属于医疗器械。
背景技术:
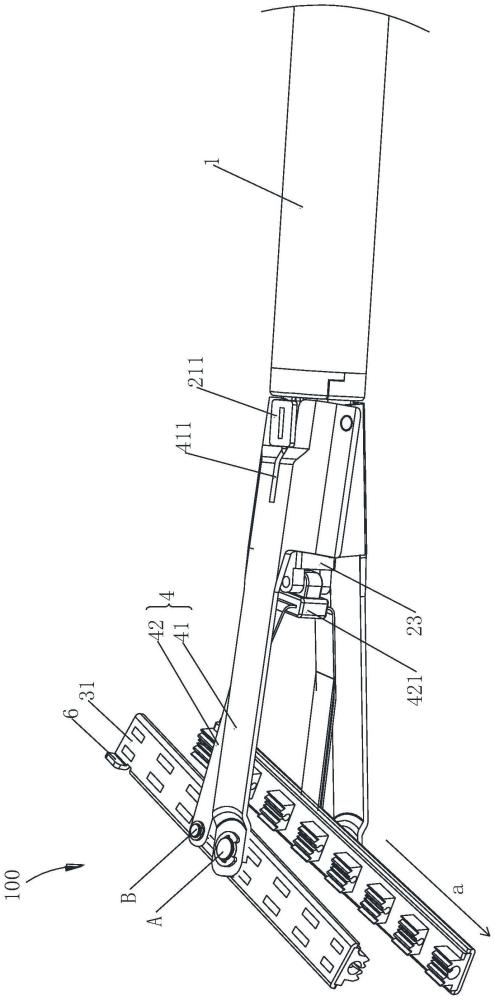
1、目前,外科手术中用于替代手工缝合的外科手术器械包括吻合器和荷包钳,该类外科手术器械由手柄和一端可拆卸安装在手柄上的末端执行器构成,根据适用于不同的身体部位和进行不同类型的外科手术,可以选用不同种类的末端执行器,该类外科手术器械的末端执行器通常由两个可以闭合或打开的钳臂构成,钳臂上对应设置有用于对人体组织进行切割、缝合的功能组件,其工作原理是通过在手术部位精确定位的穿刺器的套管进入患者体内,通过手柄控制末端执行器的两个钳臂夹持目标组织,继而通过钳臂上的功能组件对组织进行切割、缝合。
2、其中,为了适用于人体构造,便于对人体内不同位置的组织执行所需要的工作,末端执行器被配置为可绕其与手柄的连接点摆动,以使末端执行器在人体内可偏转至对应的组织附近。现有技术中,末端执行器的端部与手柄连接,且末端执行器的摆动,通常通过在末端执行器与手柄之间设置齿轮齿条传动结构实现,如专利号cn217827966u的中国专利公开了一种钉仓组件摆动机构及其腹腔镜吻合器,该项专利中,钉仓组件即通过齿轮齿条传动结构实现摆动。
3、由于齿轮齿条传动结构的加工和安装精度要求高,将大大增加外科手术器械的生产和安装难度,且制造成本高。
技术实现思路
1、本发明的目的在于提供一种末端执行器,其可以降低生产及安装难度,降低制造成本。
2、为达到上述目的,本发明提供如下技术方案:
3、一种末端执行器,包括:
4、钳口组件,包括两个相对设置的钳臂,两个所述钳臂在驱动力的作用下朝相互远离或相互靠近的方向运动,以使两个所述钳臂张开或闭合;以及
5、摆动机构,与两个所述钳臂连接;
6、其中,所述连杆组合件包括两个对称设置的连杆单元,两个所述连杆单元与两个所述钳臂呈一对一设置,所述连杆单元包括第一连杆和第二连杆,所述第一连杆、第二连杆中的至少一个在驱动力的作用下运动,以驱动所述钳臂摆动;所述第一连杆与钳臂的交点、所述第二连杆与钳臂的交点沿所述钳口组件的纵长方向布置。
7、进一步地,所述第一连杆、所述第二连杆中的一个在所述驱动力的作用下,带动所述钳臂绕所述第一连杆、所述第二连杆中的另一个与钳臂的交点摆动。
8、进一步地,所述第一连杆、第二连杆铰接在所述钳臂上,所述第二连杆在第一驱动力的作用下运动,以使所述钳臂绕所述第一连杆与钳臂的交点摆动,两个所述第一连杆在第二驱动力的作用下带动两个所述钳臂张开或闭合。
9、进一步地,过所述第一连杆与钳臂的交点、所述第二连杆与钳臂的交点的虚拟线,与所述钳臂的纵长方向的轴线形成有夹角。
10、进一步地,所述钳臂靠近所述第二连杆与钳臂的交点的一侧设置有止挡件。
11、进一步地,所述第一连杆和所述第二连杆在驱动力的作用下的运动方向相反。
12、进一步地,所述第一连杆与钳臂的交点靠近所述第二连杆与钳臂的交点设置。
13、进一步地,所述第一连杆与钳臂的交点、所述第二连杆与钳臂的交点中的一个靠近所述钳臂的末端或首端设置。
14、进一步地,所述钳臂包括金属骨架和可拆卸安装在所述金属骨架上的塑料穿针结构。
15、本发明还提供一种外科手术器械,包括:
16、外科手术器械手柄;以及
17、如上述任一项所述的末端执行器,安装至所述外科手术器械手柄。
18、本发明的有益效果在于:本申请中,钳臂上沿其纵长方向连接有两个连杆,两个连杆中的至少一个在驱动力的作用下运动,以驱动钳臂摆动,与现有技术相比,本申请通过两个连杆的配合以实现钳臂的转动,降低了加工和安装精度要求,进而降低成本,便于生产。
19、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,并可依照说明书的内容予以实施,以下以本发明的较佳实施例并配合附图详细说明如后。
技术特征:1.一种末端执行器,其特征在于,包括:
2.如权利要求1所述的末端执行器,其特征在于,所述第一连杆、所述第二连杆中的一个在所述驱动力的作用下,带动所述钳臂绕所述第一连杆、所述第二连杆中的另一个与钳臂的交点摆动。
3.如权利要求2所述的末端执行器,其特征在于,所述第一连杆、第二连杆铰接在所述钳臂上,所述第二连杆在第一驱动力的作用下运动,以使所述钳臂绕所述第一连杆与钳臂的交点摆动,两个所述第一连杆在第二驱动力的作用下带动两个所述钳臂张开或闭合。
4.如权利要求3所述的末端执行器,其特征在于,过所述第一连杆与钳臂的交点、所述第二连杆与钳臂的交点的虚拟线,与所述钳臂的纵长方向的轴线形成有夹角。
5.如权利要求4所述的末端执行器,其特征在于,所述钳臂靠近所述第二连杆与钳臂的交点的一侧设置有止挡件。
6.如权利要求1所述的末端执行器,其特征在于,所述第一连杆和所述第二连杆在驱动力的作用下的运动方向相反。
7.如权利要求2至6任一项所述的末端执行器,其特征在于,所述第一连杆与钳臂的交点靠近所述第二连杆与钳臂的交点设置。
8.如权利要求2至6任一项所述的末端执行器,其特征在于,所述第一连杆与钳臂的交点、所述第二连杆与钳臂的交点中的一个靠近所述钳臂的末端或首端设置。
9.如权利要求1所述的末端执行器,其特征在于,所述钳臂包括金属骨架和可拆卸安装在所述金属骨架上的塑料穿针结构。
10.一种外科手术器械,其特征在于,包括:
技术总结本发明涉及一种末端执行器及外科手术器械,该末端执行器包括:钳口组件,包括两个相对设置的钳臂,两个钳臂在驱动力的作用下朝相互远离或相互靠近的方向运动,以使两个钳臂张开或闭合;摆动机构,与两个钳臂连接;连杆组合件包括两个对称设置的连杆单元,两个连杆单元与两个钳臂呈一对一设置,连杆单元包括第一连杆和第二连杆,第一连杆、第二连杆中的至少一个在驱动力的作用下运动,以驱动钳臂摆动;第一连杆与钳臂的交点、第二连杆与钳臂的交点沿钳口组件的纵长方向布置。本申请通过两个连杆的配合以实现钳臂的转动,降低了加工和安装精度要求,进而降低成本,便于生产。技术研发人员:李大平受保护的技术使用者:苏州英途康医疗科技有限公司技术研发日:技术公布日:2024/8/1本文地址:https://www.jishuxx.com/zhuanli/20240802/259946.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。