用于口岸运输的平板AGV及潜入式对接物料架的规划控制方法与流程
- 国知局
- 2024-08-05 12:03:32
本发明涉及一种自动驾驶系统规划控制,特别涉及一种针对口岸运输的大型8x4平板agv及其潜入式对接物料架的规划控制方法。
背景技术:
1、在工业园区或口岸港口,目前主要采用人工驾驶运输车辆进行工业半成品、成品或集装箱的转运, 随着自动驾驶技术的快速发展落地,叠加国家鼓励智慧化改造升级的需求,大型阿克曼转向8x4平板agv(自动导向车,automated guided vehicle)在这些场景内的运用已经越来越常见。
2、目前一般的平板agv的上装运载支架和车辆一体,只能运输固定尺寸规格的货物,不能柔性运输不同规格的货物, 且agv到达指定装卸地点后,需等待货物的装卸,使用效率不高。
3、潜入式物料架的使用实现了柔性运输和agv使用效率的提升,但由于物料架的宽度需和agv的宽度匹配,不宜设计得过宽,留给agv潜入的空间有限, 另外阿克曼转向底盘的姿态调整的灵活性不如差速转向底盘,规划控制算法需考虑车辆运动学因素,这种潜入式装载物料架存在巨大的算法复杂性及安全性挑战,因此目前采用的是人工遥控车辆潜入装载物料架。
技术实现思路
1、本发明提供一种阿克曼转向8x4平板agv自主规划路线并控制转向和速度潜入对接潜入式物料架的方法,旨在通过agv对物料架的灵活、高效安全对接,实现货物的柔性运输和效率的提升,以及人工成本的降低。其具体技术方案如下所述:
2、作为第一方面,本发明提供了一种用于口岸运输的平板agv潜入式对接物料架的规划控制方法,所述方法步骤如下:
3、s1,调度系统根据所接收的运输任务,调取区域内地图,并确定物料架定位及需要调度的agv,下发装载任务;
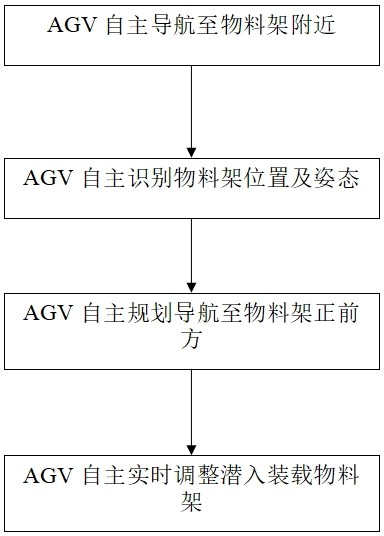
4、s2,agv根据调度系统下发的装载任务,自主规划导航至物料架附近;
5、s3,agv通过传感器感知其与物料架的相对位置及姿态;
6、s4,agv根据所述的相对位置及姿态规划从当前位置行进到物料架正前方的最佳路径,自主根据规划的路径行驶至物料架正前方;
7、s5,实时监测agv的朝向角及中轴线位置与物料架的朝向角及中轴线位置的相对状态,对agv的朝向角及中轴线位置进行实时修正,以确保与物料架的朝向角及中轴线位置重合,进而保持车辆自主慢速潜入物料架内;
8、s6,agv潜入至预设的对接位置后对接物料架,向调度系统上报装载完成信息。
9、进一步地,所述s1为:调度系统根据所接收的运输任务,调取区域内高精地图,并确定物料架在高精地图上的定位坐标,根据该定位坐标搜寻区域内可供调度的agv,向被选中的agv下发包含所述定位坐标在内的装载任务。
10、进一步地,所述s2为:agv根据调度系统下发的装载任务调取物料架的定位坐标,结合区域内高精地图,自主规划其到达所述定位坐标的路径图,并导航至物料架附近。
11、进一步地,所述s3为:agv达到物料架附近后,利用包括激光雷达和摄像头在内的若干个传感器融合感知agv与物料架的相对位置和姿态,然后根据车辆当前基于高精地图坐标系的定位信息把所述相对位置和姿态转换到地图坐标系内对物料架进行标识。
12、进一步地,所述s4为:agv根据高精地图坐标系中所标识的物料架的相对位置及姿态,再考虑包括车辆底盘的运动学、可行驶区域和障碍物在内的若干个因数约束,以物料架正前方预设距离处为终点,使用hybrida*算法规划reeds_shepp曲线作为路径,控制使用purepursuit路径跟踪算法控制车辆自主行驶到物料架正前方预设距离处。
13、进一步地,所述s5为:在agv向物料架行驶预设距离的路程上,实时监测agv的朝向角及中轴线位置与物料架的朝向角及中轴线位置的相对状态,转换到agv车辆坐标系做规划控制计算,以物料架的中轴线为参考线,使用purepursuit实时跟踪参考线控制agv,对agv的朝向角及中轴线位置进行实时修正,以确保与物料架的朝向角及中轴线位置重合,并实时计算agv车身边界和物料架内壁的距离,调整agv的速度和转向,进而保持车辆自主慢速潜入物料架内。
14、进一步地,所述s6为:agv潜入至预设的举升对接位置后,控制agv的举升机构对接物料架并固定,向调度系统上报装载完成信息,并等待接收调度系统下发指令。
15、作为第二方面,本发明提供了一种用于口岸运输的平板agv,所述agv包括车体、规划控制模块、感知融合模块,其中:
16、规划控制模块,用于根据包括区域内高精地图信息、物料架信息、车体信息、环境布局及障碍物信息在内的若干相关数据,结合算法制定路径规划供车体使用;
17、感知融合模块,通过车体上的包括激光雷达和摄像头在内的若干传感器融合感知车体与物料架的相对位置和姿态,并将所述相对位置和姿态在区域内高精地图上进行标识,供规划控制模块规划路径所用;
18、车体,车体,用于在规划控制模块所下发的路径规划的控制下行进,对物料架进行装载;
19、存储模块,用于存储一个或多个执行所有上述方法的软件程序代码。
20、进一步地,所述agv还包括举升装置,所述举升装置安装于车体上,用于对物料架进行举升、降下。
21、作为第三方面,本发明提供了一种数据处理装置,所述数据处理装置包括中央处理器、可读存储器、数据总线,其特征在于:所述可读存储器可存储一个或多个软件程序,所述中央处理器同所述可读存储器通过数据总线进行数据连接,所述中央处理器根据操作指令对可读存储器内的软件程序代码进行读取,从而执行所有上述方法。
22、本发明的有益效果是:不同的货物可采用不同的运载支架,货物可被提前装载或延后卸载,agv到达装卸地点后可直接装载或卸载物料架,无需等待。通过agv对物料架的灵活、高效安全对接,实现货物的柔性运输和效率的提升,以及人工成本的降低。
技术特征:1.一种用于口岸运输的平板agv潜入式对接物料架的规划控制方法,其特征在于,所述方法步骤如下:
2.根据权利要求1所述的一种用于口岸运输的平板agv潜入式对接物料架的规划控制方法,其特征在于,所述s1为:调度系统根据所接收的运输任务,调取区域内高精地图,并确定物料架在高精地图上的定位坐标,根据该定位坐标搜寻区域内可供调度的agv,向被选中的agv下发包含所述定位坐标在内的装载任务。
3.根据权利要求2所述的一种用于口岸运输的平板agv潜入式对接物料架的规划控制方法,其特征在于,所述s2为:agv根据调度系统下发的装载任务调取物料架的定位坐标,结合区域内高精地图,自主规划其到达所述定位坐标的路径图,并导航至物料架附近。
4.根据权利要求3所述的一种用于口岸运输的平板agv潜入式对接物料架的规划控制方法,其特征在于,所述s3为:agv达到物料架附近后,利用包括激光雷达和摄像头在内的若干个传感器融合感知agv与物料架的相对位置和姿态,然后根据车辆当前基于高精地图坐标系的定位信息把所述相对位置和姿态转换到地图坐标系内对物料架进行标识。
5.根据权利要求4所述的一种用于口岸运输的平板agv潜入式对接物料架的规划控制方法,其特征在于,所述s4为:agv根据高精地图坐标系中所标识的物料架的相对位置及姿态,再考虑包括车辆底盘的运动学、可行驶区域和障碍物在内的若干个因数约束,以物料架正前方预设距离处为终点,使用hybrida*算法规划reeds_shepp曲线作为路径,控制使用purepursuit路径跟踪算法控制车辆自主行驶到物料架正前方预设距离处。
6.根据权利要求5所述的一种用于口岸运输的平板agv潜入式对接物料架的规划控制方法,其特征在于,所述s5为:在agv向物料架行驶预设距离的路程上,实时监测agv的朝向角及中轴线位置与物料架的朝向角及中轴线位置的相对状态,转换到agv车辆坐标系做规划控制计算,以物料架的中轴线为参考线,使用purepursuit实时跟踪参考线控制agv,对agv的朝向角及中轴线位置进行实时修正,以确保与物料架的朝向角及中轴线位置重合,并实时计算agv车身边界和物料架内壁的距离,调整agv的速度和转向,进而保持车辆自主慢速潜入物料架内。
7.根据权利要求6所述的一种用于口岸运输的平板agv潜入式对接物料架的规划控制方法,其特征在于,所述s6为:agv潜入至预设的举升对接位置后,控制agv的举升机构对接物料架并固定,向调度系统上报装载完成信息,并等待接收调度系统下发指令。
8.一种用于口岸运输的平板agv,所述agv包括:车体、规划控制模块、感知融合模块,其特征在于,
9.根据权利要求8所述的一种用于口岸运输的平板agv,其特征在于,所述agv还包括举升装置,所述举升装置安装于车体上,用于对物料架进行举升、降下。
10.一种数据处理装置,所述数据处理装置包括中央处理器、可读存储器、数据总线,其特征在于:所述可读存储器可存储一个或多个软件程序,所述中央处理器同所述可读存储器通过数据总线进行数据连接,所述中央处理器根据操作指令对可读存储器内的软件程序代码进行读取,从而执行权利要求1至7任意一项所述方法。
技术总结本发明提供一种用于口岸运输的大型8x4平板AGV及自主规划路线并控制转向和速度潜入对接物料架的方法,AGV根据调度系统下发的装载任务,自主规划导航至物料架附近。通过激光雷达和摄像头融合感知物料架基于高精地图坐标系的位置及姿态,结合环境布局、障碍物位置等因素,规划出AGV从当前位置到物料架正前方的最佳路径,自主根据规划的路径行驶至物料架正前方后,激光雷达实时感知物料架的相对位置和姿态,车辆自主慢速潜入,实时调整方向使车辆中轴线和物料架中轴线保持重合,潜入至举升位置后控制升降机构装载物料架,向AGV调度系统上报装载完成信息。旨在通过AGV对物料架的灵活、高效安全对接,实现货物的柔性运输和效率的提升,以及人工成本的降低。技术研发人员:胡志远,朱仁杰,杨洁受保护的技术使用者:巨视慧行(武汉)科技有限公司技术研发日:技术公布日:2024/8/1本文地址:https://www.jishuxx.com/zhuanli/20240802/260860.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。