一种核电用水下机器人二自由度多功能云台的制作方法
- 国知局
- 2024-08-08 16:59:53
本发明属于水下机器人集成云台,具体涉及一种核电用水下机器人二自由度多功能云台。
背景技术:
1、核电厂海水系统拦污栅是海水系统隔离杂物的重要组成部分,设置在海水水面以下,能够防止较大的杂物、海生物进入到电厂海水系统中,是核电厂海水系统安全运行的必备设施。利用水下机器人定期且有效的对拦污栅进行检查十分必要。
2、核电用水下机器人的基础视觉系统由摄像机(摄像头)、照明灯和前视声呐所组成,统一安装在集成视觉云台上。常规的集成视觉云台大多固定安装在水下机器人的机架上,只具有单向活动的功能,如专利号为cn202122760830.2《一种可连续旋转的水下电动云台》中国实用新型专利。然而,由于水下环境复杂,只具有单向活动集成视觉云台,无法满足水下机器人在水下的游动。现有水下机器人的云台设计有待完善。本发明在常规水下机器人的基础上,结合核电厂使用环境的特点,创造地提出了一种核电专用水下机器人二自由度多功能云台结构。结构考虑使用和操作要求,设计了包含控制平稳的控制机构、及观测操作控制的多自由度机构。
技术实现思路
1、本发明的目的是提供一种核电用水下机器人二自由度多功能云台,能够在两个自由度上进行灵活转动工作。
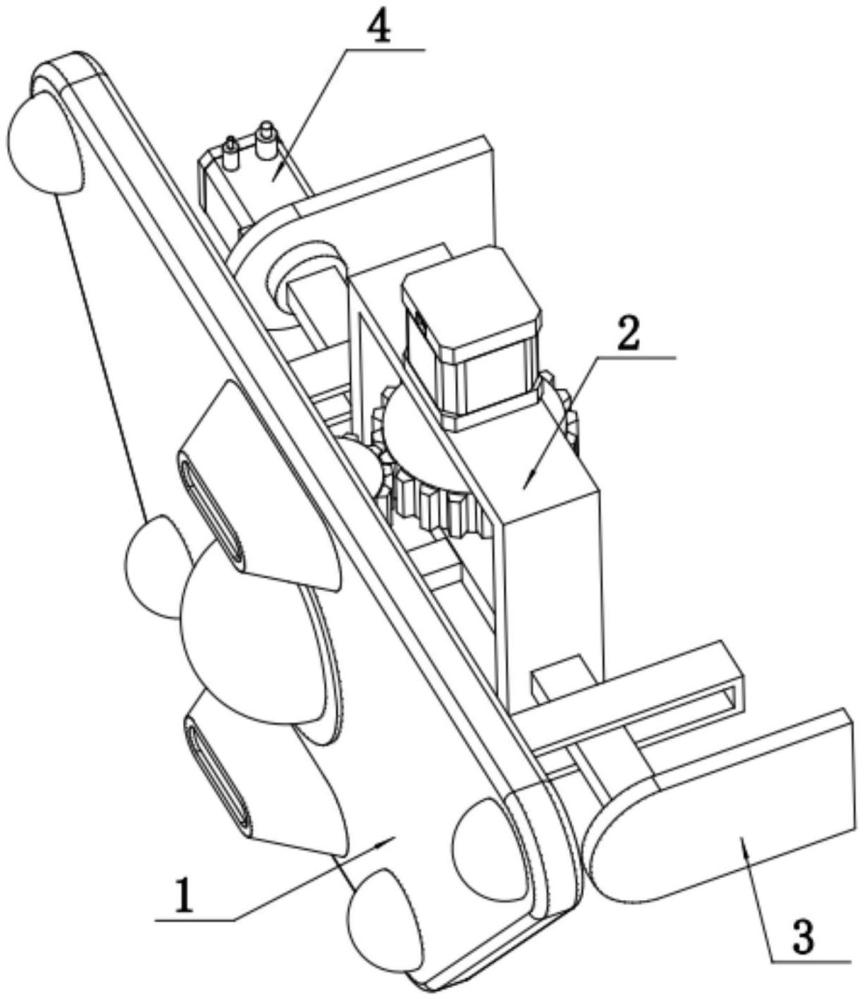
2、本发明的技术方案如下:一种核电用水下机器人二自由度多功能云台,包括集成视觉云台、云台多方位机构、安装侧板和一级旋转电机,集成视觉云台与云台多方位机构相连,云台多方位机构设置在两个所述安装侧板上,其中一个所述安装侧板上设有一级旋转电机,一级旋转电机与云台多方位机构相连。
3、所述的云台多方位机构包括一级旋转杆、限位套杆、二级保持架、二级伺服电机和驱动齿轮,一级旋转杆与集成视觉云台铰接相连,一级旋转杆转动安装在安装侧板上,一级旋转杆的任一端转动穿过安装侧板与一级旋转电机的输出端固定相连,一级旋转杆上滑动安装有两个所述限位套杆,限位套杆的一端与集成视觉云台固定相连,限位套杆的内侧设置有二级保持架,二级保持架固定安装在一级旋转杆上,二级保持架上方固定安装有二级伺服电机,驱动齿轮转动安装在二级保持架上,并与驱动齿轮的输出端固定相连。
4、所述的安装侧板为‘u’形结构,安装侧板固定安装在核电用水下机器人的机架上。
5、所述的安装侧板上固定安装的一级旋转电机和二级伺服电机均为水下伺服电机。
6、所述的一级旋转杆是由旋转部和端头部所构成,旋转部为矩形结构,端头部为圆形结构,一级旋转杆能够实现集成视觉云台一级转动。
7、所述的一级旋转杆上滑动安装的限位套杆,以及固定安装的二级保持架均为‘凵’字形结构。
8、所述的集成视觉云台包括集成云台板、照明灯、摄像机和前视声呐,集成云台板的内侧与一级旋转杆铰接相连,集成云台板的内侧固定安装有二级半齿轮,二级半齿轮的轴心与一级旋转杆的铰接点轴心重合,集成云台板的外侧四角分别设有照明灯,集成云台板的外侧中间设有摄像机和前视声呐。
9、所述的摄像机的两侧或一侧设置有前视声呐。
10、所述的摄像机为低照度高清摄像头。
11、所述的驱动齿轮与二级半齿轮啮合相连,云台多方位机构用于实现集成视觉云台的转动。
12、本发明的有益效果在于:通过集成视觉云台与云台多方位机构相结合的设计手段,实现了集成视觉云台能够在一定区域内灵活转动、扩大水下机器人在水下的观察视野范围,减小水下机器人在水下游动局限性的技术效果。
技术特征:1.一种核电用水下机器人二自由度多功能云台,其特征在于:包括集成视觉云台、云台多方位机构、安装侧板和一级旋转电机,集成视觉云台与云台多方位机构相连,云台多方位机构设置在两个所述安装侧板上,其中一个所述安装侧板上设有一级旋转电机,一级旋转电机与云台多方位机构相连。
2.如权利要求1所述的一种核电用水下机器人二自由度多功能云台,其特征在于:所述的云台多方位机构包括一级旋转杆、限位套杆、二级保持架、二级伺服电机和驱动齿轮,一级旋转杆与集成视觉云台铰接相连,一级旋转杆转动安装在安装侧板上,一级旋转杆的任一端转动穿过安装侧板与一级旋转电机的输出端固定相连,一级旋转杆上滑动安装有两个所述限位套杆,限位套杆的一端与集成视觉云台固定相连,限位套杆的内侧设置有二级保持架,二级保持架固定安装在一级旋转杆上,二级保持架上方固定安装有二级伺服电机,驱动齿轮转动安装在二级保持架上,并与驱动齿轮的输出端固定相连。
3.如权利要求1或2所述的一种核电用水下机器人二自由度多功能云台,其特征在于:所述的安装侧板为‘u’形结构,安装侧板固定安装在核电用水下机器人的机架上。
4.如权利要求1或2所述的一种核电用水下机器人二自由度多功能云台,其特征在于:所述的安装侧板上固定安装的一级旋转电机和二级伺服电机均为水下伺服电机。
5.如权利要求2所述的一种核电用水下机器人二自由度多功能云台,其特征在于:所述的一级旋转杆是由旋转部和端头部所构成,旋转部为矩形结构,端头部为圆形结构,一级旋转杆能够实现集成视觉云台一级转动。
6.如权利要求2所述的一种核电用水下机器人二自由度多功能云台,其特征在于:所述的一级旋转杆上滑动安装的限位套杆,以及固定安装的二级保持架均为‘凵’字形结构。
7.如权利要求1所述的一种核电用水下机器人二自由度多功能云台,其特征在于:所述的集成视觉云台包括集成云台板、照明灯、摄像机和前视声呐,集成云台板的内侧与一级旋转杆铰接相连,集成云台板的内侧固定安装有二级半齿轮,二级半齿轮的轴心与一级旋转杆的铰接点轴心重合,集成云台板的外侧四角分别设有照明灯,集成云台板的外侧中间设有摄像机和前视声呐。
8.如权利要求7所述的一种核电用水下机器人二自由度多功能云台,其特征在于:所述的摄像机的两侧或一侧设置有前视声呐。
9.如权利要求7所述的一种核电用水下机器人二自由度多功能云台,其特征在于:所述的摄像机为低照度高清摄像头。
10.如权利要求2所述的一种核电用水下机器人二自由度多功能云台,其特征在于:所述的驱动齿轮与二级半齿轮啮合相连,云台多方位机构用于实现集成视觉云台的转动。
技术总结本发明属于水下机器人集成云台技术领域,具体涉及一种核电用水下机器人二自由度多功能云台。包括集成视觉云台、云台多方位机构、安装侧板和一级旋转电机,集成视觉云台与云台多方位机构相连,云台多方位机构设置在两个所述安装侧板上,其中一个所述安装侧板上设有一级旋转电机,一级旋转电机与云台多方位机构相连。本发明的有益效果在于:通过集成视觉云台与云台多方位机构相结合的设计手段,实现了集成视觉云台能够在一定区域内进行灵活转动、扩大水下机器人在水下的观察视野范围,减小水下机器人在水下游动局限性的技术效果。技术研发人员:江锋,龚代涛,许锋,张维,赵卫东,商俊敏,金辉,胡宇杰受保护的技术使用者:中核核电运行管理有限公司技术研发日:技术公布日:2024/8/5本文地址:https://www.jishuxx.com/zhuanli/20240808/271714.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表