船舶定位方法、装置、电子设备及存储介质
- 国知局
- 2024-08-08 17:02:40
本发明涉及船舶自动驾驶,具体涉及一种船舶定位方法、装置、电子设备及存储介质。
背景技术:
1、在自主驾驶船舶执行进港靠泊任务时,面对环境的复杂性和有限的可航行水域,精确地检测和定位周围的目标以及自身位置成为关键。这是船舶靠泊的第一步,也是最重要的一步,它关系到后续船舶进港的路线规划。加之环境复杂且可航行水域有限,自主驾驶船舶的靠泊困难大幅度提升。
2、目标,slam(即光检测和测距同步定位与建图)技术在无人车、无人机和水下机器人等不同平台上得到非常广泛的应用,但在将slam技术应用于水面平台特别是港口等复杂环境中,自主驾驶船只面临诸多挑战。这些挑战包括航道环境时刻变化、船只运动的不确定性、传感器误差以及设备故障。
3、综上,目前采用slam技术对船舶进行定位,存在准确性不高,不能适应船舶实时信息的变化。
技术实现思路
1、有鉴于此,有必要提供一种船舶定位方法、装置、电子设备及存储介质,用以解决目前采用slam技术对船舶进行定位,存在准确性不高,不能适应船舶实时信息的变化的技术问题。
2、为了解决上述问题,一方面,本发明提供了一种船舶定位方法,包括:
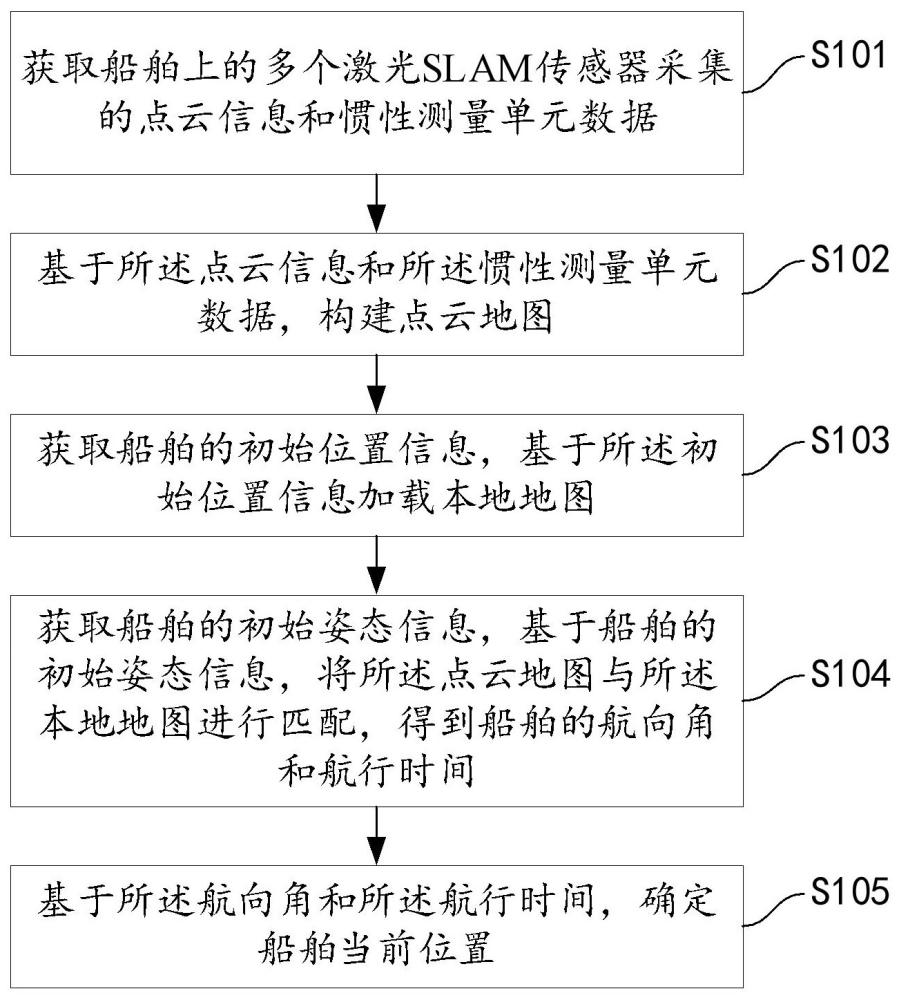
3、获取船舶上的多个激光slam传感器采集的点云信息和惯性测量单元数据;
4、基于所述点云信息和所述惯性测量单元数据,构建点云地图;
5、获取船舶的初始位置信息,基于所述初始位置信息加载本地地图;
6、获取船舶的初始姿态信息,基于船舶的初始姿态信息,将所述点云地图与所述本地地图进行匹配,得到船舶的航向角和航行时间;
7、基于所述航向角和所述航行时间,确定船舶当前位置。
8、在一种可能的实现方式中,基于所述点云信息和所述惯性测量单元数据,构建点云地图,包括:
9、从所述点云信息中识别黑色区域,并基于所述黑色区域确定水面位置;
10、从所述水面位置确定船舶停靠点;
11、基于所述惯性测量单元数据和船舶的卫星定位数据对所述船舶停靠点进行修正,基于修正后的船舶停靠点,得到点云地图。
12、在一种可能的实现方式中,获取船舶的初始位置信息,包括:
13、获取船舶上的rtk设备采集的船舶的初始位置信息。
14、在一种可能的实现方式中,基于船舶的初始姿态信息,将所述点云地图与所述本地地图进行匹配,包括:
15、将所述点云地图划分为多个网格,并确定每个网格的多维正态分布;
16、将所述本地地图旋转后与所述点云地图进行对齐,基于每个网格的多维正态分布,确定所述本地地图在旋转后的转变点落入对应网格的概率;
17、基于所述转变点落入对应网格的概率,以及所述初始姿态信息,确定所述点云地图与所述本地地图之间的匹配关系。
18、在一种可能的实现方式中,基于所述转变点落入对应网格的概率,以及所述初始姿态信息,确定所述点云地图与所述本地地图之间的匹配关系,包括:
19、基于所述本地地图中每个转变点落入对应网格的概率,以及所述初始姿态信息,得到所述点云地图中的点云与所述本地地图中转变点之间的联合概率;
20、基于所述联合概率,确定所述点云地图与所述本地地图之间的匹配关系。
21、在一种可能的实现方式中,基于所述联合概率,以及所述初始姿态信息,确定所述点云地图与所述本地地图之间的匹配关系,包括:
22、从所述本地地图的所有转变点对应的联合概率中,确定最大联合概率;
23、基于所述最大联合概率,确定所述点云地图与所述本地地图之间的匹配关系。
24、在一种可能的实现方式中,船舶定位方法,还包括:
25、基于所述船舶位置对所述本地地图进行更新;其中,更新后的本地地图用于与下一次对船舶进行定位时对应的点云地图进行匹配。
26、另一方面,本发明还提供一种船舶定位装置,包括:
27、获取模块,用于获取船舶上的多个激光slam传感器采集的点云信息和惯性测量单元数据;
28、构建模块,用于基于所述点云信息和所述惯性测量单元数据,构建点云地图;
29、初始化模块,用于获取船舶的初始位置信息,基于所述初始位置信息加载本地地图;
30、匹配模块,用于获取船舶的初始姿态信息,基于船舶的初始姿态信息,将所述点云地图与所述本地地图进行匹配,得到船舶的航向角和航行时间;
31、另一方面,本发明还提供一种电子设备,包括存储器和处理器,其中,
32、所述存储器,用于存储程序;
33、所述处理器,与所述存储器耦合,用于执行所述存储器中存储的所述程序,以实现如上述任意一项所述的船舶定位方法的步骤。
34、另一方面,本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上述任一项所述的船舶定位方法的步骤。
35、采用上述实现方式的有益效果是:本发明提供的船舶定位方法、装置、电子设备及存储介质,通过多个激光slam传感器采集的点云信息和惯性测量单元数据构建点云地图,基于船舶的初始姿态信息,将点云地图与本地地图进行匹配,进而确定船舶位置,本发明引入惯性测量数据来弥合激光slam技术在高速运动条件下姿态估计不准确和频率低等问题所导致的动态失真,从而提供精准位姿信息进行动态修正校准操作,以应对船舶港口这一复杂环境下的挑战;激光slam传感器与惯性测量单元数据的结合进一步提升了船舶停靠时的定位精度和建图质量,再将构建的点云地图与本地地图进行匹配,从而提高船舶定位的准确性,解决目前采用slam技术对船舶进行定位,存在准确性不高,不能适应船舶实时信息的变化的技术问题。
技术特征:1.一种船舶定位方法,其特征在于,包括:
2.根据权利要求1所述的船舶定位方法,其特征在于,基于所述点云信息和所述惯性测量单元数据,构建点云地图,包括:
3.根据权利要求1所述的船舶定位方法,其特征在于,获取船舶的初始位置信息,包括:
4.根据权利要求1所述的船舶定位方法,其特征在于,基于船舶的初始姿态信息,将所述点云地图与所述本地地图进行匹配,包括:
5.根据权利要求4所述的船舶定位方法,其特征在于,基于所述转变点落入对应网格的概率,以及所述初始姿态信息,确定所述点云地图与所述本地地图之间的匹配关系,包括:
6.根据权利要求5所述的船舶定位方法,其特征在于,基于所述联合概率,以及所述初始姿态信息,确定所述点云地图与所述本地地图之间的匹配关系,包括:
7.根据权利要求1-6任一项所述的船舶定位方法,其特征在于,还包括:
8.一种船舶定位装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括存储器和处理器,其中,
10.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述的船舶定位方法的步骤。
技术总结本发明提供一种船舶定位方法、装置、电子设备及存储介质,属于船舶自动驾驶技术领域,该方法包括:获取船舶上的多个激光SLAM传感器采集的点云信息和惯性测量单元数据;基于所述点云信息和所述惯性测量单元数据,构建点云地图;获取船舶的初始位置信息,基于所述初始位置信息加载本地地图;获取船舶的初始姿态信息,基于船舶的初始姿态信息,将所述点云地图与所述本地地图进行匹配,得到船舶的航向角和航行时间;基于所述航向角和所述航行时间,确定船舶当前位置。本发明基于多个激光SLAM传感器和惯性测量单元采集的数据,解决目前采用SLAM技术对船舶进行定位,存在准确性不高,不能适应船舶实时信息的变化的技术问题。技术研发人员:马全党,江玉洁,刘文,祝良俊,杨宇航,叶芸,夏威受保护的技术使用者:武汉理工大学技术研发日:技术公布日:2024/8/5本文地址:https://www.jishuxx.com/zhuanli/20240808/272009.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。