悬臂架桥机的前进-锚固体系的制作方法
- 国知局
- 2024-08-08 17:14:35
本技术涉及一种悬臂架桥机的前进-锚固体系,属于桥梁施工辅助装备。
背景技术:
1、中国专利cn202211543500.0公开了一种用于全焊钢桁梁桥的散件式悬臂拼装空中作业平台及其施工方法。该空中作业平台是一种桥梁施工装备,实现“前悬臂、后喂梁”的施工作业方法,适用于“无法布置临时支承或辅助船舶状态且跨越山谷、航道”的桁架桥梁。其糅合了悬臂法施工用的“挂篮”和先简支后连续法施工用的“架桥机”体系。
2、作为大型桥梁施工设备,其设计阶段不仅需要关注设备的安全性和功能使用效率,还应考虑设备安装、拆除的便捷性。国内大型跨越江河和山谷的架桥机,要么构件大型化,然后采用大吨位浮船起重机或者大吨位汽车起重机或履带起重机安装;要么将构件小型化,采用塔式起重机安装或小吨位汽车起重机安装。
3、鉴于空中作业平台为悬臂结构,因此,行车过程中,若不采取控制措施,极易造成空中作业平台倾覆,为了保证空中作业平台行车的安全性,防止空中作业平台倾覆,在上述的公开文献中,公开了一种反压设备,包括平台后横梁、反向坦克小车、反压梁以及反压梁支撑,平台后横梁安装在空中作业平台底层(即两根桁架下弦杆)的后端,同时在空中作业平台使用阶段为满足节段运输要求是临时拆除的,在行走节段因反压需求要重新安装。反向坦克小车安装在平台后横梁上。反压梁的后端通过所述的反向坦克小车支撑在平台后横梁上,而反压梁的前端则支撑在主桥的上层桥面体系上。通过实际使用,发现这种反压设备的防倾覆效果不是很理想,故而有必要重新开发一种更能保证空中作业平台行车的安全性的压重体系。
技术实现思路
1、本实用新型目的是提供一种悬臂架桥机的前进-锚固体系,以提高悬臂架桥机在空中作业的稳定性、安全性。
2、为实现上述的技术目的,本实用新型将采取如下的技术方案:
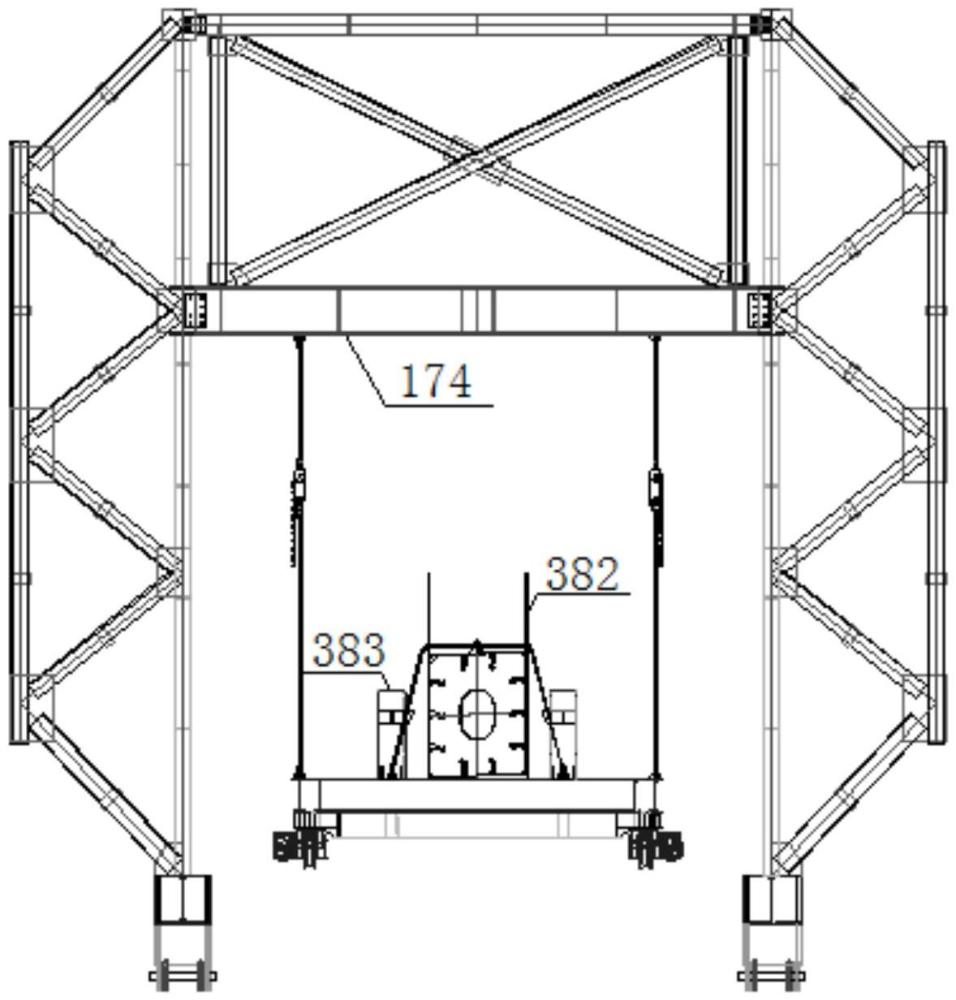
3、一种悬臂架桥机的前进-锚固体系,包括机体行进驱动装置以及机体锚固装置;机体行进驱动装置设置在支承桁架体系的锚固段底部;支承桁架体系在机体行进驱动装置的动力驱动下,带动支承桁架体系行进至主桥上桥面的钢桥节段拼接预设位置处,并在主桥上桥面的钢桥节段拼接预设位置处通过可拆卸的机体锚固装置锚固支承桁架体系的锚固段;所述机体行进驱动装置包括前支点行车、前支点轨道体系、后支点行车体系、防倒退体系以及压重体系,所述机体锚固装置包括前支点锚固体系以及后支点锚固体系;所述的压重体系,基于运梁小车进行搭建,包括后支点中弦杆、压重受拉葫芦以及压重构造;压重构造包括运梁小车以及装载在运梁小车上的桥梁钢结构节段以及配重块;压重受拉葫芦包括两组,其中一组压重受拉葫芦竖向布置,两端分别与运梁小车的前端以及支承桁架体系的中弦杆上所设置的吊点对应连接;余下的一组压重受拉葫芦沿着顺桥向布置,两端分别与运梁小车的后端以及支承桁架体系的后支点中弦杆上所设置的吊点对应连接;
4、运梁小车上配置一压重计量机构,包括节段重量检测机构、配重块计量装置以及配重块吊装设备,节段重量检测机构安装在节段吊装设备上,能够检测所吊装的桥梁钢结构节段的重量,并能够将所检测到的重量信息反馈至配重块计量装置;配重块计量装置根据所接收到的桥梁钢结构节段的重量,确定装载在运梁小车上的配重块重量,并通过控制配重块吊装设备吊装到位。
5、优选地,配重块计量装置包括配重块数量计算模块,配重块数量计算模块能够根据运梁小车上所装载的桥梁钢结构节段的重量,计算出需要在运梁小车上补充的配重块的数量np,并向配重块吊装设备发出配重块吊装指令,以促使配重块吊装设备往运梁小车上吊装np块配重块,从而对机体实现压重操作。
6、优选地,所述防倒退体系包括防倒退悬挂吊耳、防倒退锚固吊耳、防倒退手拉葫芦以及防倒退拉力计;
7、在支承桁架体系两侧的下弦杆底部均对称布设有若干吊耳悬挂位点,每一个吊耳悬挂位点处均沿着主桥的横桥向安装有一个防倒退悬挂吊耳;
8、在临近桥面板两侧侧腹板顶部的位置处,各设一道防倒退锚固吊耳,该防倒退锚固吊耳的锚点中心与支承桁架体系的前支点邻近;两道防倒退锚固吊耳对应为第一、第二防倒退锚固吊耳;
9、防倒退手拉葫芦的一端通过防倒退拉力计与同侧的防倒退锚固吊耳连接,另一端则与任一吊耳悬挂位点aj处的防倒退悬挂吊耳连接。
10、当防倒退手拉葫芦自动从吊耳悬挂位点a1处的防倒退悬挂吊耳上解离下来后,再自动挂接到吊耳悬挂位点a2处的防倒退悬挂吊耳上时,防倒退体系配装有自动化夹爪设备;
11、所述的自动化夹爪设备,包括伺服驱动机构、夹爪机构、吊耳悬挂位点识别标签以及夹爪驱动控制机构;
12、在每一个吊耳悬挂位点均粘贴有吊耳悬挂位点识别标签;夹爪机构上安装有扫码器,扫码器通过扫描吊耳悬挂位点识别标签,能够识别出相应的各吊耳悬挂位点;
13、夹爪驱动控制机构能够控制伺服驱动机构带动夹爪机构移动至相应吊耳悬挂位点aj,并控制夹爪机构将相应吊耳悬挂位点aj处的防倒退手拉葫芦解离下来后,移至下一吊耳悬挂位点aj+1,并将防倒退手拉葫芦连接至吊耳悬挂位点aj+1对应的防倒退悬挂吊耳上,如此往复,直至机体完成单次前进距离,此时防倒退手拉葫芦的两端分别与防倒退锚固吊耳、吊耳悬挂位点an处的防倒退悬挂吊耳连接。
14、优选地,所述的前支点行车包括两台,一一对应地安装在支承桁架体系前端所设置的两个前支点所在位置处,每一台前支点行车均采用双轮电驱轨道行车;
15、所述的前支点轨道体系,包括前支点行车轨道、布设在前支点行车轨道底部的轨道调平结构以及布设在前支点行车轨道两端的前支点行车驻车结构;前支点行车轨道有两条,对应为第一、第二前支点行车轨道,其中:第一前支点行车轨道沿着上桥面板的大高程侧顺桥向布置,第二前支点行车轨道则沿着上桥面板的小高程侧顺桥向布置;两台前支点行车一一对应地匹配安装在两条前支点行车轨道中,且每一条前支点行车轨道的长度均能够匹配机体单次移动的距离,两条前支点行车轨道的间距与主桥主桁中心距及支承桁架中心距相匹配;
16、所述轨道调平结构有两类,其中一类为第一轨道调平结构,匹配主桥桥面的大高程侧而构建,包括若干均布在第一前支点行车轨道底部的第一锲形钢板;另一类则为第二轨道调平结构,匹配主桥桥面的小高程侧而构建,包括垫梁以及若干均布在垫梁与第二前支点行车轨道底部的第二锲形钢板。
17、优选地,所述的双轮电驱轨道行车包括两台主动车轮组、一座平衡梁以及行车电机系统以及行车制动系统;两台主动车轮组分设在平衡梁的两端,而平衡梁的中部位置则通过连接件安装至支承桁架体系上;行车电机系统的动力输出端与主动车轮组联动连接,同时前支点行车配设有行车制动系统。
18、优选地,所述的后支点行车体系包括两台分设在支承桁架体系后端的底部两侧的后支点行车,每一台后支点行车均包括固定式连接柱、销轴调整节段、坦克车连接节段以及坦克车,固定式连接柱的上端与支承桁架体系的底部连接固定,下端通过顺桥向销轴与销轴调整节段定位连接,且销轴调整节段还能够通过横桥向销轴与坦克车连接节段的上端定位连接,坦克车安装在坦克车连接节段的下端。
19、优选地,所述的前支点锚固体系包括两类,其中一类为第一前支点锚固结构,匹配上桥面板的大高程侧而构建,包括第一前支点锚固支承垫块以及第一前支点锚固支承垫梁;另一类则为第二前支点锚固结构,匹配上桥面板的小高程侧而构建,包括第二前支点锚固支承垫块以及第二前支点锚固支承垫梁;依次通过第一前支点锚固支承垫块、第一前支点锚固支承垫梁置于上桥面板的大高程侧上方,余下的一个则依次通过第二前支点锚固支承垫块、第二前支点锚固支承垫梁置于上桥面板的小高程侧上方;
20、所述的后支点锚固体系采用二力杆体系,包括后锚上杆和后锚下杆,后锚下杆的上端通过沿横桥向布置的后锚销轴与后锚上杆的下端定位连接,而后锚下杆的下端通过主桥主桁上弦顶板上所预设的横桥向临时锚固加劲肋锚定,后锚上杆的上端固定安装在支承桁架体系的下弦杆底部。
21、基于上述的技术目的,相对于现有技术,本实用新型具有如下的优势:
22、1、本实用新型所述的压重体系,装配在桁架支承体系的锚固段,其分别在桁架支承体系顺桥向以及竖向均有连接,从而确保压重体系能够有效地预防悬臂架桥机发生倾覆。并通过压重体系的有效压重核算,使得压重体系的防倾覆功能得以实现,巩固悬臂架桥机在空中作业的稳定性、安全性。
23、2、本实用新型所述的防倒退体系,能够有效地防止机体发生倒退。
本文地址:https://www.jishuxx.com/zhuanli/20240808/273251.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表