拖车控制方法、装置、设备、介质、产品及车辆与流程
- 国知局
- 2024-08-19 14:16:44
本技术属于车辆控制,尤其涉及一种拖车控制方法、装置、设备、介质、产品及车辆。
背景技术:
1、随着新能源汽车的不断普及,越来越多的用户选择使用新能源汽车出行。但是,目前新能源汽车(例如电动车)充电不方便,里程衰减问题仍然严重,特别是长时间拥堵的情况下,电动车容易出现馈电趴窝的情况,此时往往需要呼叫救援拖车。
2、通常,市面上的电动车在拖车过程中,为了避免在被拖动时产生反电动势击穿igbt(insulate-gate bipolar transistor,绝缘栅双极晶体管),或是润滑不良导致电驱过热等问题,因此对于电动车往往只能通过四轮离地背车的方式进行救援,使得对救援车辆要求较高,增加了救援时间和救援成本。
技术实现思路
1、本技术实施例提供一种拖车控制方法、装置、设备、介质、产品及车辆,能够降低对救援车辆的要求,减少救援时间和救援成本。
2、第一方面,本技术实施例提供一种拖车控制方法,该方法包括:
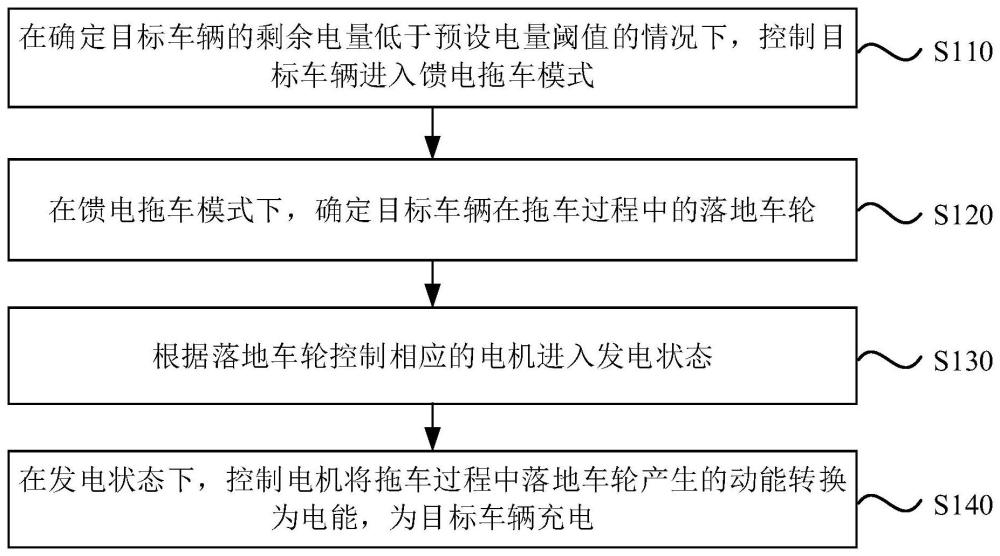
3、在确定目标车辆的剩余电量低于预设电量阈值的情况下,控制所述目标车辆进入馈电拖车模式;
4、在所述馈电拖车模式下,确定所述目标车辆在拖车过程中的落地车轮;
5、根据所述落地车轮控制相应的电机进入发电状态;
6、在所述发电状态下,控制所述电机将拖车过程中所述落地车轮产生的动能转换为电能,为所述目标车辆充电。
7、在其中一些实施方式中,所述根据所述落地车轮控制相应的电机进入发电状态,包括:
8、在所述落地车轮为前轮的情况下,控制所述目标车辆中的前电机进入发电状态;
9、在所述落地车轮为后轮的情况下,控制所述目标车辆中的后电机进入发电状态。
10、在其中一些实施方式中,所述在所述发电状态下,控制所述电机将拖车过程中所述落地车轮产生的动能转换为电能,为所述目标车辆充电,包括:
11、在所述发电状态下,控制所述电机将拖车过程中所述落地车轮产生的动能转换为电能,并按照预设的目标发电功率为所述目标车辆充电;
12、其中,所述目标发电功率根据所述目标车辆的系统耗电功率和预设充电功率中的至少一项确定。
13、在其中一些实施方式中,所述按照预设的目标发电功率为所述目标车辆充电,包括:
14、在拖车过程中获取所述落地车轮的转速;
15、根据所述转速和所述目标发电功率,确定目标扭矩值;
16、控制所述目标车辆按照所述目标扭矩值输出扭矩,以控制所述电机按照所述目标发电功率为所述目标车辆充电。
17、在其中一些实施方式中,在确定目标车辆的剩余电量低于预设电量阈值的情况下,所述方法还包括:
18、输出馈电提示信息,所述馈电提示信息用于引导用户停靠所述目标车辆;
19、在确定所述目标车辆完成停靠的情况下,停止动力输出,并预留目标电量。
20、在其中一些实施方式中,在所述目标车辆在拖车过程中不存在落地车轮的情况下,所述方法还包括:
21、控制所述目标车辆下电;
22、在所述目标车辆重新上电的情况下,利用所述目标电量为所述目标车辆供电。
23、在其中一些实施方式中,在所述发电状态下,控制所述电机将拖车过程中所述落地车轮产生的动能转换为电能,为所述目标车辆充电之后,所述方法还包括:
24、在所述目标车辆退出所述馈电拖车模式,并且启动所述目标车辆的情况下,利用充电得到的电量为所述目标车辆供电。
25、在其中一些实施方式中,在确定目标车辆的剩余电量低于预设电量阈值的情况下,所述方法还包括:
26、检测所述目标车辆的状态是否满足拖车条件;
27、在所述目标车辆的状态不满足拖车条件的情况下,如果检测到所述目标车辆处于目标拖车状态,则输出报警提示信息,所述目标拖车状态包括前轮拖车状态或后轮拖车状态。
28、第二方面,本技术实施例提供了一种拖车控制装置,该装置包括:
29、第一控制模块,用于在确定目标车辆的剩余电量低于预设电量阈值的情况下,控制所述目标车辆进入馈电拖车模式;
30、车轮确定模块,用于在所述馈电拖车模式下,确定所述目标车辆在拖车过程中的落地车轮;
31、第二控制模块,用于根据所述落地车轮控制相应的电机进入发电状态;
32、充电控制模块,用于在所述发电状态下,控制所述电机将拖车过程中所述落地车轮产生的动能转换为电能,为所述目标车辆充电。
33、在其中一些实施方式中,所述第二控制模块包括:
34、第一控制子模块,用于在所述落地车轮为前轮的情况下,控制所述目标车辆中的前电机进入发电状态;
35、第二控制子模块,用于在所述落地车轮为后轮的情况下,控制所述目标车辆中的后电机进入发电状态。
36、在其中一些实施方式中,所述充电控制模块包括:
37、第三控制子模块,用于在所述发电状态下,控制所述电机将拖车过程中所述落地车轮产生的动能转换为电能,并按照预设的目标发电功率为所述目标车辆充电;
38、其中,所述目标发电功率根据所述目标车辆的系统耗电功率和预设充电功率中的至少一项确定。
39、在其中一些实施方式中,所述第三控制子模块包括:
40、转速获取单元,用于在拖车过程中获取所述落地车轮的转速;
41、扭矩确定单元,用于根据所述转速和所述目标发电功率,确定目标扭矩值;
42、扭矩输出单元,用于控制所述目标车辆按照所述目标扭矩值输出扭矩,以控制所述电机按照所述目标发电功率为所述目标车辆充电。
43、在其中一些实施方式中,所述拖车控制装置还包括:
44、第一输出模块,用于在确定目标车辆的剩余电量低于预设电量阈值的情况下,输出馈电提示信息,所述馈电提示信息用于引导用户停靠所述目标车辆;
45、停止输出模块,用于在确定所述目标车辆完成停靠的情况下,停止动力输出,并预留目标电量。
46、在其中一些实施方式中,所述拖车控制装置还包括:
47、下电控制模块,用于在所述目标车辆在拖车过程中不存在落地车轮的情况下,控制所述目标车辆下电;
48、第一供电模块,用于在所述目标车辆重新上电的情况下,利用所述目标电量为所述目标车辆供电。
49、在其中一些实施方式中,所述拖车控制装置还包括:
50、第二供电模块,用于在所述发电状态下,控制所述电机将拖车过程中所述落地车轮产生的动能转换为电能,为所述目标车辆充电之后,在所述目标车辆退出所述馈电拖车模式,并且启动所述目标车辆的情况下,利用充电得到的电量为所述目标车辆供电。
51、在其中一些实施方式中,所述拖车控制装置还包括:
52、状态检测模块,用于在确定目标车辆的剩余电量低于预设电量阈值的情况下,检测所述目标车辆的状态是否满足拖车条件;
53、第二输出模块,用于在所述目标车辆的状态不满足拖车条件的情况下,如果检测到所述目标车辆处于目标拖车状态,则输出报警提示信息,所述目标拖车状态包括前轮拖车状态或后轮拖车状态。
54、第三方面,本技术实施例提供了一种电子设备,该电子设备包括:处理器以及存储有计算机程序指令的存储器;
55、处理器执行所述计算机程序指令时实现如第一方面的任一项实施例中所述的拖车控制方法的步骤。
56、第四方面,本技术实施例提供了一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序指令,计算机程序指令被处理器执行时实现如第一方面的任一项实施例中所述的拖车控制方法的步骤。
57、第五方面,本技术实施例提供了一种计算机程序产品,计算机程序产品中的指令由电子设备的处理器执行时,使得所述电子设备执行如第一方面的任一项实施例中所述的拖车控制方法的步骤。
58、本技术实施例中的拖车控制方法、装置、设备、介质、产品及车辆,通过在目标车辆电量过低时,控制目标车辆进入馈电拖车模式,并在该模式下确定目标车辆在拖车过程中的落地车轮,控制该落地车轮对应的电机进入发电状态,进而在该发电状态下控制电机将拖车过程中落地车轮产生的动能转换为电能,为目标车辆充电。这样,由于本技术实施例在拖车过程中将落地车轮对应的电机设置为发电状态,因此可以实现车辆以落地拖车的方式进行救援,而非只能通过四轮离地背车的方式,因此能够降低对救援车辆的要求,减少救援时间和救援成本。
本文地址:https://www.jishuxx.com/zhuanli/20240819/274553.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。