一种提拉式采茶机器人
- 国知局
- 2024-08-22 14:18:31
本发明属于农业机械和机器人,涉及了一种提拉式采茶机器人。
背景技术:
1、随着农村劳动力的减少,茶叶采摘的人工成本不断上升。此外,人工采摘过程中由于人为因素的影响,容易造成茶叶质量不一致和茶树的损伤。为应对这些挑战,市场上出现了大量自动化采茶设备,虽然在一定程度上提高了采摘效率,但大多只具备简单的采摘功能,依旧缺乏对茶树的保护措施,容易造成茶树枝条的损伤,影响茶树的长期健康;此外,这些设备的抗环境干扰能力有限,难以应对不同品种茶叶和复杂茶园环境的需求。
技术实现思路
1、针对上述问题,本发明目的是提出了一种提拉式采茶机器人,通过一个机械臂提住茶树枝条,另一个机械臂进行精确采摘,提高采茶效率并减少对茶树的损伤。
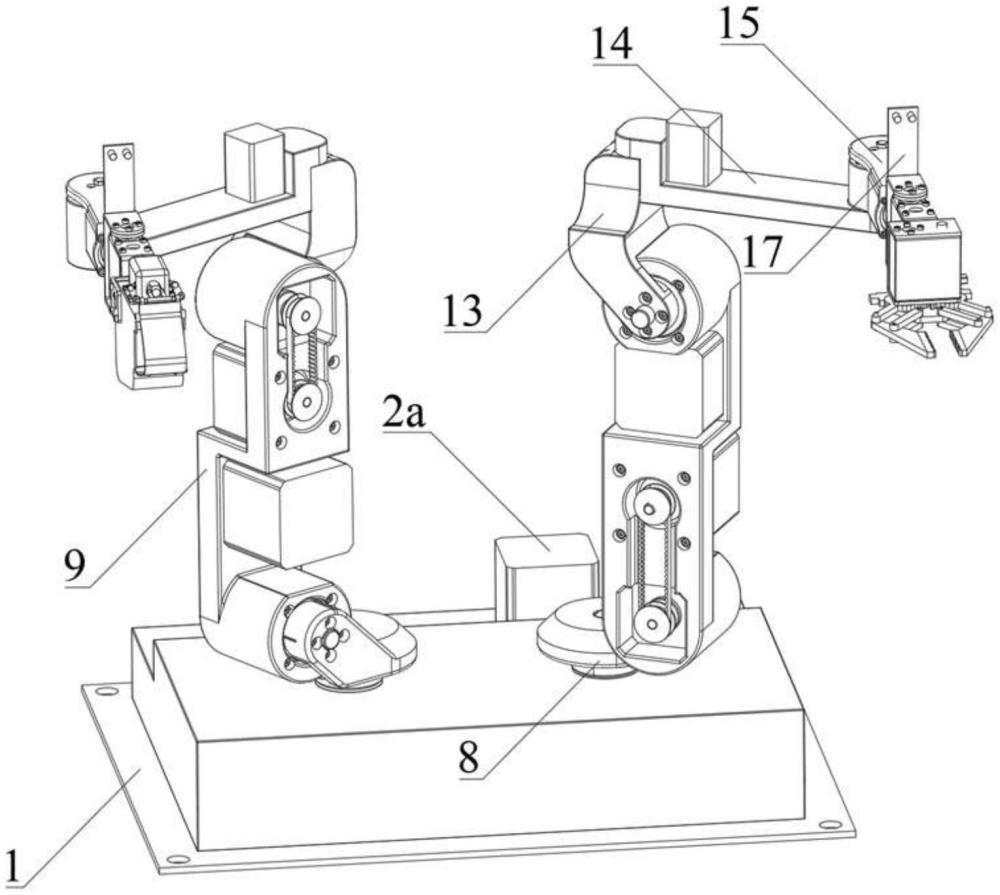
2、本发明的技术方案是:本发明所述的一种提拉式采茶机器人,包括底座,在所述底座的顶端左右侧安置有左(提拉),右(采摘)两组机械手臂,其基座关节与传动轴采用键相连,由上往下依次是弹簧垫圈、上角接触轴承、轴套、齿轮及角接触轴承等;
3、所述角接触轴承通过底座内部结构,弹簧垫圈,轴套限位;
4、所述齿轮采用键和轴套限位;在所述底座的后方搭载有第一步进电机,第一步进电机与第一齿轮通过键槽和螺钉直接插接;所述三个齿轮通过轴线连接,彼此平行布置,形成并联连接,可以实现双机械臂同步传动。
5、进一步地,所述肩关节两侧镂空,采用螺栓固定背邻安装两个步进电机。所述步进电机通过同步轮和同步皮带驱动谐波减速器,步进电机与同步轮采用螺钉直接紧固;所述谐波减速器分别连接基座关节与肘关节,使得肩关节和肘关节上下运动;在提拉式采茶机器人中,将步进电机尽可能的集中放置在肩关节上,可以使得末端更加轻便灵活,提高采摘效率和精度。
6、进一步地,所述肘关节上方开长方形槽,延长肘关节末端插入并采用螺钉固定,将延长肘关节上的步进电机尽可能的靠近肘关节,同样通过同步轮和同步皮带驱动谐波减速器,所述谐波减速器连接腕翻转关节,使得腕翻转关节左右运动。进一步降低末端负载,同时大大简化了结构设计。
7、进一步地,所述腕翻转关节采用螺栓固定步进电机,所述步进电机通过键直接插连长u支架,所述长u支架内部两侧采用螺栓连接固定有舵盘,所述舵盘与舵机相连,所述舵机另一端采用螺栓连接固定有短u支架,所述结构组成腕偏转关节,可以实现末端执行器旋转运动和左右偏转运动。更多的自由度可以实现复杂的操作和运动路径。
8、进一步地,所述末端执行器分为提拉末端执行器(左机械臂)和采摘末端执行器(右机械臂)。
9、进一步地,所述提拉末端执行器包括提拉末端执行器机架,在所述提拉末端执行器机架上端对称布置有两个提拉末端执行器驱动连杆,所述提拉末端执行器驱动连杆上端安装有舵机支架,舵机安装在舵机支架中间,并采用舵机轴驱动提拉末端执行器驱动连杆,所述提拉末端执行器机架前端对称铰接有提拉末端驱动器连杆,所述提拉末端执行器驱动连杆和提拉末端执行器连杆前段铰接有提拉末端执行器抓头,所述提拉末端执行器抓头内侧黏连海绵体,提拉末端执行器可以扶住茶树枝条以稳定茶树并减少晃动,同时海绵体可以避免损伤枝条。
10、进一步地,所述采摘末端执行器包括采集盒,在所述采集盒上端通过螺栓固定有往复式电磁铁,往复式电磁铁推杆输出端铰接有采集末端执行器连杆,所述末端执行器连杆另一端与动刀片顶部铰接,所述动刀片两端铰接有动刀片-复位弹簧连接件,所述往复式电磁铁两侧通过螺钉固定有电磁铁-复位弹簧连接件,动刀片-复位弹簧连接件与对应的电磁铁-复位弹簧连接件通过复位弹簧相连。
11、进一步地,所述视觉相机采用螺栓连接于长u支架上。
12、进一步地,在所述底座四周预留有螺栓孔,方便移植在其他设备上,同时可以安装检测工具和设备。
13、本发明的有益效果是:1、提拉式采茶机器人配备了左右两组机械手臂,左机械臂负责提拉茶树枝条,右机械臂负责精确采摘。使得采摘过程更加高效,减少了单机械臂操作时的等待和切换时间,大幅提升了整体采茶效率。(提高采茶效率);2、提拉末端执行器抓头内侧黏连海绵体,进一步减少茶树损伤,保障茶树的长期健康。(减少茶树损伤);3、腕偏转关节的设计增加了末端执行器的自由度,能够实现复杂的操作和运动路径。使得机器人在面对各种环境干扰时仍能保持稳定的操作,提高了适应性和可靠性。(增强适用性)。
技术特征:1.一种提拉式采茶机器人,包括底座(1),其特征在于,在所述底座(1)顶端的左右两侧分别安置有左机械手臂及右机械手臂,在所述左、右两组机械手臂的下侧均安置有基座关节(8),在两侧所述基座关节(8)的下侧均安置有传动轴(4),两侧所述基座关节(8)与传动轴(4)之间均采用键相连,
2.根据权利要求1所述的一种提拉式采茶机器人,其特征在于,在所述角接触轴承(6)的下侧均安置有轴套(5);
3.根据权利要求1所述的一种提拉式采茶机器人,其特征在于,在两侧所述基座关节(8)上均连接有两侧镂空的肩关节(9)及肘关节(13),在所述肩关节(9)上采用螺栓固定背邻安置有第二步进电机(2b);
4.根据权利要求3所述的一种提拉式采茶机器人,其特征在于,在所述肘关节(13)的上方开设有长方形槽,在所述长方形槽中安置有延长肘关节(14),所述延长肘关节(14)的末端插入长方形槽中并采用螺钉进行固定,在所述延长肘关节(14)上、靠近肘关节(13)处安置有第三步进电机(2c),所述第三步进电机(2c)同样通过另外安置的同步轮(10)和同步皮带(11)驱动连接的谐波减速器(12),在此处的谐波减速器(12)连接有腕翻转关节(15)。
5.根据权利要求4所述的一种提拉式采茶机器人,其特征在于,在所述腕翻转关节(15)处安置有步进电机,所述腕翻转关节(15)采用螺栓固定步进电机,所述步进电机通过键插连有长u支架(16a),在所述长u支架(16a)的内部两侧采用螺栓固定连接有舵盘(16d),在所述舵盘(16d)上连接有舵机(16c),所述舵机(16c)的另一端采用螺栓固定连接有短u支架(16b);
6.根据权利要求5所述的一种提拉式采茶机器人,其特征在于,在所述长u支架(16a)的下端均安置有末端执行器,安置在右机械手臂上的为采摘末端执行器,安置在左机械手臂上的为提拉末端执行器。
7.根据权利要求6所述的一种提拉式采茶机器人,其特征在于,所述提拉末端执行器包括提拉末端执行器机架(18),在所述提拉末端执行器机架(18)的上端对称安置有两个提拉末端执行器驱动连杆(19),在所述提拉末端执行器驱动连杆(19)的上端安置有舵机支架(16e),在所述舵机支架(16e)的中间位置安置有舵机(16c),采用舵机(16c)的舵机轴驱动提拉末端执行器驱动连杆(19),在所述提拉末端执行器机架(18)的前端对称铰接有两个提拉末端执行器连杆(22),在所述提拉末端执行器驱动连杆(19)和提拉末端执行器连杆(22)的前端铰接有提拉末端执行器抓头(20),在所述提拉末端执行器抓头(20)的内侧黏连有海绵体(21)。
8.根据权利要求6所述的一种提拉式采茶机器人,其特征在于,所述采摘末端执行器包括采集盒(30),在所述采集盒(30)的上端通过螺栓固定有往复式电磁铁(23),所述往复式电磁铁(23)通过安置的往复式电磁铁推杆输出端铰接有采集末端执行器连杆(27),在所述采摘末端执行器连杆(27)的另一端铰接有动刀片(28),其连接在动刀片(28)的顶部;
9.根据权利要求8所述的一种提拉式采茶机器人,其特征在于,在所述采集盒(30)上、靠近动刀片(28)的一侧安置有静刀片(29);
10.根据权利要求1所述的一种提拉式采茶机器人,其特征在于,在所述底座(1)的四周均预留有螺栓孔。
技术总结本发明公开了一种提拉式采茶机器人;涉及农业机械和机器人技术领域,包括底座,在所述底座上安装有左右两组机械手臂,机械手臂包括基座关节、肩关节、肘关节、腕翻转关节、腕偏转关节以及末端执行器;左手臂负责提拉,末端安装有平行传动的提拉末端执行器,用以稳定茶树,减少采摘过程中的晃动,同时抓头处黏连有海绵体,可以减少工作过程中对于茶树的损伤;右手臂负责采摘,末端安装有采摘末端执行器,采用往复式电磁铁驱动,可以精准的采摘茶叶进而避免造成对茶树的损伤。本发明采用双机械臂一提一采的方式,可以能够提升采摘效率,在保证嫩芽完整性的同时,避免对其他茶叶和茶树的损伤,同时高自由度可以提高该采茶机器人的适用性和可靠性。技术研发人员:胡朝斌,孔祥国,邵文龙,陈晓淼受保护的技术使用者:江苏科技大学技术研发日:技术公布日:2024/8/21本文地址:https://www.jishuxx.com/zhuanli/20240822/278031.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表