具有智能监测及自动更换喷嘴功能的3D打印装置
- 国知局
- 2024-08-22 14:53:06
本发明涉及3d打印装置领域,具体地,涉及一种具有智能监测及自动更换喷嘴功能的3d打印装置。
背景技术:
1、3d打印技术作为一种革命性的制造工艺,通过逐层堆叠材料以构建物体的方式,在金属材料的直接成形制造方面得到了广泛的应用。3d打印是一种迭代的工序,其核心思想在于通过不断重复地层层扫描,将材料逐渐堆积成最终的三维结构。这种逐层堆积的方法为制造高度复杂、精密的物体提供了可能,然而,这一过程中3d打印机的关键组件——喷嘴,作为激光出光口和粉末出粉口,喷嘴状态直接影响喷粉和粉末汇聚,尤其在处理高反材料如铜合金和铝合金时,堵塞是常见问题,尤其在加工中频繁发生。堵塞会导致粉末无法汇聚,进而引发熔覆层坍塌,显著降低加工质量。若不及时疏通,可能导致激光头外喷嘴整体磨损,甚至报废。
2、随着视觉监测的发展,图像识别监测逐渐投入到3d打印过程,然而目前市面上的送粉状态监测主要是通过对熔池状态、送粉流量以及飞溅状态的间接监测,通过对熔覆状态的监测推断激光头状态的间接监测方式,并不能直观监测到激光头问题,欠缺一定的监测精度并可能影响打印质量。
3、市面上绝大多数3d打印机在激光喷嘴出现问题时,往往需要依赖人工进行修理或更换。这不仅增加了生产线上的人力投入,而且影响了整体加工效率。随着机械工程的迅速发展,一些具备自动更换喷嘴功能的3d打印机逐渐涌现,为提高生产效率和降低人工干预成本提供了潜在的解决方案。然而,这些自动更换喷嘴的3d打印机普遍存在一个共性问题,即无法实现对喷嘴状态的实时监测。尽管它们能够通过自动更换喷嘴来减轻人工操作的负担,但仍然需要人工判断何时进行更换,以确保打印质量和设备稳定性。这种半自动化的状态在一定程度上削弱了自动更换喷嘴系统的高度一体化特性。
4、综上,针对激光喷头的间接监测方式以及出现故障时需要人工更换或半自动化机械更换,进而导致加工质量收到影响、加工效率低下且增加劳动力成本等问题,有必要提出一种高度集成一体化的3d打印机,不仅能够实现喷嘴自动更换功能,并且配备喷嘴实时状态监测系统,通过直接监测激光喷嘴状态,系统能够及时发现故障问题并出发更换程序,完全独立于人工,实现了高度一体化的自动化生产流程,为制造业的未来发展带来了可持续解决方案。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种具有智能监测及自动更换喷嘴功能的3d打印装置。
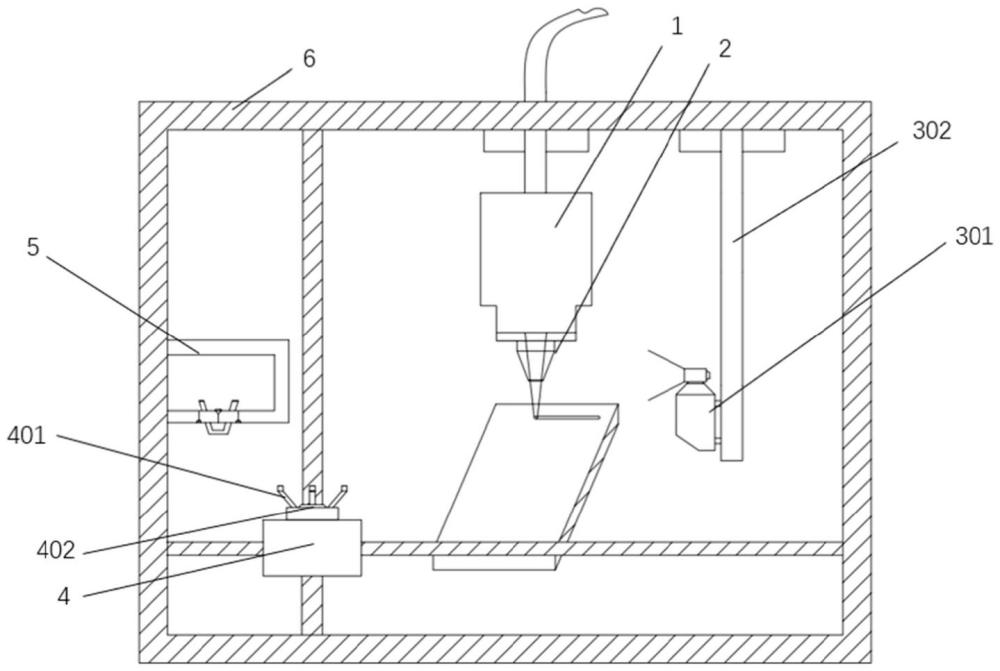
2、根据本发明提供的一种具有智能监测及自动更换喷嘴功能的3d打印装置,包括:激光头单元、激光喷嘴、激光头状态实时监测系统、三轴运动机器手以及喷嘴仓;
3、激光头单元采用送粉形式进行激光熔覆加工,激光喷嘴采用同轴环形送粉激光喷嘴;
4、激光头状态实时监测系统对激光喷嘴的送粉状态进行实时判断,判断送粉状态及是否存在堵塞,所述三轴运动机器手在激光头状态实时监测系统提供需要更换喷头信号后,机械手通过电机控制系统拆解激光喷嘴下端部分,并运输至喷嘴仓,随后抓取喷嘴仓中新的喷嘴进行定位更换。
5、优选地,所述激光喷嘴包括上喷嘴和下喷嘴,所述上喷嘴和下喷嘴可拆卸连接,所述三轴运动机器手对下喷嘴进行拆卸更换。
6、优选地,所述激光头单元采用同轴送粉方式进行加工,加工方法包括表面熔覆或直接成型。
7、优选地,所述激光头状态监测系统包括图像采集单元,所述图像采集单元采用工业相机,所述图像采集单元与监控传动拐臂连接,通过调整监控传动拐臂使镜头进行对焦。
8、优选地,所述激光头状态监测系统包括图像处理单元,所述图像处理单元包括灰度处理模块、图像滤波降噪模块和视觉特征提取模块;所述灰度处理模块将原始图像的灰度直方图范围压缩,所述图像滤波降噪模块用于消除激光束与粉末之间由于散射效应引起的干扰,并剔除粉末飞溅产生的噪声;所述视觉特征提取模块负责提取图像的清晰度特征,以及激光出光口轮廓特征。
9、优选地,所述清晰度特征利用空域的灰度梯度算法或频域的灰度梯度算法计算。
10、优选地,所述激光头加工状态检测系统对激光喷嘴的监测方法包括:
11、步骤s1:获取对焦时激光头与基板之间的距离为实际加工距离,对焦后标定图像与实际尺寸的比例,综合得到图像像素值与实际尺寸的比例为n:1;
12、步骤s2:通过图像采集单元获取加工图像,图像处理单元对采集到的图像进行预处理;
13、步骤s3:获得采集图像实时的清晰度特征值,即平均灰度梯度值t;获取激光出光口的轮廓长度像素值l;
14、步骤s4:根据标定比例n:1以及对图像的处理,采集激光加工时图像清晰度特征值t,并以连续m个点进行一次函数拟合;
15、步骤s5:对于拟合处理后的数据进行处理,首先针对同轴熔池图像数据,对于同轴熔池图像中的高灰度区域,采集到熔池边缘围绕质心对称两点与质心的距离分别为y1、y2,熔渣面积为s1,高灰度区域总面积为s;其次对于同轴喷嘴轮廓,采集到喷嘴周长为l;
16、步骤s6:对采集图像进行分析处理:
17、对于同轴熔池图像中的数据处理:标定正常熔池的对称值数α,当采集值|y1-y2|<α,则识别为对称熔池;当|y1-y2|≥α,则识别为非对称熔池;
18、标定正常熔渣含量δ1、δ2;当s1/s<δ2,则识别为无熔渣;当δ2<s1/s<δ1,则识别为正常熔渣;当s1/s≥δ1,则识别为大量熔渣;
19、对于同轴喷嘴轮廓的数据处理:标定圆形喷嘴周长γ,当采集值l≥γ,识别为非圆形周长;
20、步骤s7:将采集数据识别后进行喷嘴状态和送粉状态判定:
21、(1)当同时满足|y1-y2|<α,δ2<s1/s<δ1和l<γ时,则喷嘴状态正常且送粉正常;
22、(2)当同时满足l<γ、δ2<s1/s<δ1和|y1-y2|≥α时,则判定为非粘结性堵粉;
23、(3)当同时满足s1/s≥δ1和l≥γ时,则判定为粘结性堵粉;
24、(4)当同时s1/s<δ2时,则首先判断是否送粉器出故障,若送粉器无故障,则判断为熔融堵塞。
25、优选地,当送粉状态为正常时,粉末可以正常汇聚,完成加工;
26、当送粉状态为非粘接性堵粉时,通过擦拭处理;
27、当送粉状态为粘结性堵粉时,粉末已难以装配条件下处理,需要拆卸清理;
28、当送粉状态为熔融堵塞时,喷嘴已熔化报废。
29、优选地,所述三轴运动机器手由三轴运动装置带动从而对激光喷嘴进行抓取,所述三轴运动机器手上设置有可开关强磁性块,用于对喷嘴进行抓取固定;三轴运动机器手中心设置喷嘴对中传感器,通过对中传感器与喷嘴圆心进行对中,对中完成后进行抓取动作。
30、优选地,所述三轴运动机器手更换喷嘴的方法包括:
31、步骤a1:通过激光头状态实时监测系统对激光喷嘴的状态进行实时监测,当喷嘴送粉状态超出正常值范围,则产生异常信号,并将其传输给信号控制单元;
32、步骤a2:信号控制单元调动三轴运动机器手至问题喷嘴下端,随后对中传感器进行对中操作,随后向上微调三轴运动机器手并打开强磁性块对问题喷嘴进行抓取,并旋转拧下问题喷嘴,并运动至喷嘴仓下,对中传感器进行对中,对中完成后,打开挡板,将问题喷嘴移动至喷嘴仓适当位置后关闭挡板,并关闭强磁性块中的磁性;
33、步骤a3:信号控制单元控制三轴运动机器手至喷嘴仓,取出待更换喷嘴运动至激光头下部,对中传感器进行对中,对中完成后,向上微调三轴运动机器手,内外螺纹接触后旋转拧紧,喷嘴上下部分凹凸部分弹簧连接后机器手关闭强磁性块中的磁性;
34、步骤a4:机器手运动到原点位置,喷嘴仓所有挡板关闭。
35、与现有技术相比,本发明具有如下的有益效果:
36、1、本发明够准确识别喷嘴是否发生喷嘴堵塞故障,监测精确,避免影响加工质量;
37、2、本发明集成化程度高,完全一体化构造,能够实现发现问题——解决问题的全流程,提升设备的自动化水平,提高设备安全性的同时调高了喷嘴使用效率,避免影响喷嘴的正常工作。
本文地址:https://www.jishuxx.com/zhuanli/20240822/280245.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表