基于三维相空间考虑驾驶风格的车辆侧倾稳定性控制方法
- 国知局
- 2024-08-30 14:35:53
本发明属于电动汽车控制,尤其涉及基于三维相空间考虑驾驶风格的车辆侧倾稳定性控制方法。
背景技术:
1、新型电动汽车技术不仅带来了高效的能源利用率和较低的碳排放,更在车辆稳定性方面展现了巨大优势。分布式电动汽车能更精准地控制每个车轮的动力输出,显著提升了行驶安全性和驾乘体验。然而在复杂的城区交通环境中,多变的状态信息和不确定的驾驶员特性均会在一定程度上影响车辆稳定性。因此提前分析驾驶员的驾驶风格,精准评定车辆的稳定程度并设计相应的稳定性控制策略成为保证车辆在各种工况下安全行驶的首要任务。
2、随着工况复杂程度的提高,目前常用的二维相平面法受维度限制只能提供两个状态变量之间的关系,无法充分描述系统的稳定性特性。另外,在相平面中划分稳定域时所采用的双直线法未考虑车辆横摆角速度的极限值,可靠性较低。包络线法确定的稳定区域又偏向保守,造成得到的稳定区域与实际情况偏差较大。上述稳定区域划分方法均未考虑不同类型驾驶风格的影响,因此在复杂路况下依靠车辆完整信息和确定的驾驶风格来划分精确的稳定性区域,并设计多目标约束优化的控制器是目前迫切需要解决的问题。为此提出基于三维相空间考虑驾驶风格的车辆侧倾稳定性控制方法。
技术实现思路
1、本发明的目的在于提供基于三维相空间考虑驾驶风格的车辆侧倾稳定性控制方法,旨在解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
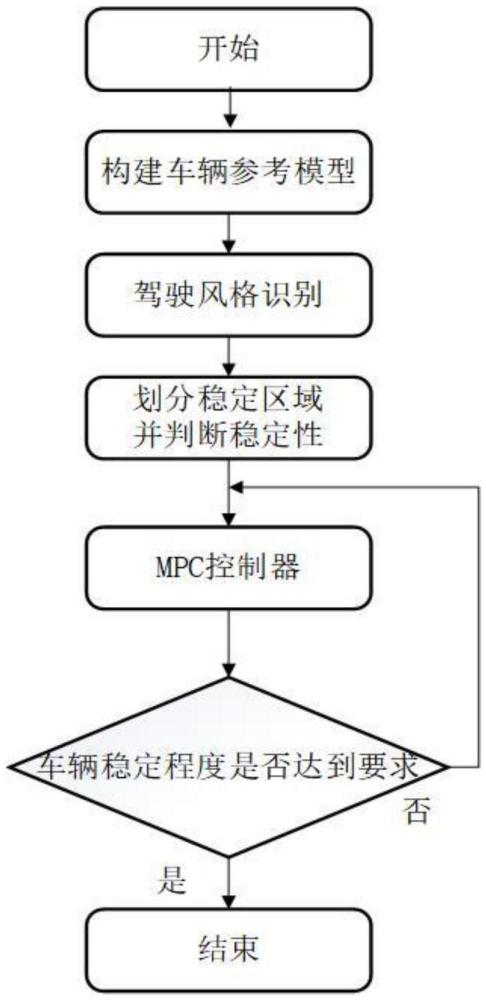
3、基于三维相空间考虑驾驶风格的车辆侧倾稳定性控制方法,包括以下步骤:
4、步骤1、车辆动力学建模:对分布式驱动电动汽车进行动力学建模,建立描述车辆侧向、横摆以及侧倾运特性的三自由度车辆动力学模型;
5、步骤2、轮胎力学建模:使用fiala轮胎模型对轮胎力进行描述;
6、步骤3、驾驶风格识别:通过在驾驶员模拟器上设计相应的转向测试场景,采集不同驾驶员在转向工况下的驾驶行为数据并提取有效特征值;采用模糊c均值聚类方法对特征值进行聚类分析;采用bp神经网络对转向特征数据进行在线识别;
7、步骤4、划分稳定区域:实时获取车辆行驶过程中的质心侧偏角、横摆角速度和侧倾角,建立质心侧偏角-横摆角速度-侧倾角三维空间,并在三维空间内根据步骤3中识别得到的驾驶风格确定一个六面体稳定区域;
8、步骤5、设计稳定性评价指标:设计与三维空间相对应的稳定性评价指标,得到当前车辆稳定性的定量分析结果;
9、步骤6、基于模型预测控制的控制器设计:结合步骤3得到的驾驶风格识别结果、步骤4得到的三维稳定区域边界以及步骤5得到的稳定性评价指标,设计模型预测控制器,得到控制量,即附加前轮转角和四轮附加转矩。
10、进一步的,所述步骤3中,驾驶风格聚类和识别的具体步骤如下:
11、步骤31、在驾驶模拟器平台上设定包含直角转弯、组合弯道的虚拟行驶环境;采集车辆入弯-弯心-出弯全过程中的方向盘转角阈值、相应时刻的车辆速度和车辆横摆角速度阈值,归一化处理后作为驾驶员转向特征信息;
12、步骤32、采用模糊c均值聚类方法,定义模糊系数为2,初选聚类个数为3,选用聚类轮廓系数作为评价指标衡量聚类效果,将驾驶风格分为保守型、正常型和激进型三类;
13、步骤33、采用单隐藏层的bp神经网络进行驾驶风格识别,网络输入层神经元数量为3,中间隐藏层神经元数量为15,输出层激活函数选用softmax函数,输出层神经元数量为3,模型通过计算驾驶动作属于不同驾驶风格的概率,并选择概率最大的驾驶风格作为预测结果输出;
14、步骤34、选择其他转弯工况进行多次实验,建立bp神经网络模型的验证集,通过离线实验与在线实时实验验证bp神经网络模型在综合转弯工况下识别驾驶风格的准确性。
15、进一步的,所述步骤4中,确定六面体稳定区域的具体步骤如下:
16、步骤41、首先得到不同质心侧偏角和横摆角速度下极限侧倾角对应的稳定点并定义为极限侧倾稳定点;
17、步骤42、在极限侧倾稳定点中,挑选极限质心侧偏角所对应的稳定点,将极限侧倾稳定点分为内极限稳定点和外极限稳定点;
18、步骤43、分别从内极限稳定点和外极限稳定点中选择八个极值稳定点并依次连接作为六面体的顶点,形成内外六面体稳定区域,得到车辆的内外稳定区域;
19、步骤44、根据不同的驾驶风格,选择外部稳定六面体作为保守型和正常型驾驶风格下的车辆三维稳定空间ωxyz1,内部稳定六面体作为激进型驾驶风格下的三维稳定空间ωxyz2。
20、进一步的,所述步骤5中,选取车辆当前状态点与稳定区域之间的最小距离作为稳定裕度评价指标,计算车辆当前状态点到六面体的最小距离的具体步骤如下:
21、步骤51、首先确定六面体的六个平面,并计算每个平面的法向量ni=(ai,bi,ci)和经过平面上任意一点的坐标(x0,y0,z0),则六面体的任意一个面用平面方程aix+biy+ciz+d=0来表示,其中d=-(aix0+biy0+ciz0);
22、步骤52、对于车辆当前状态点使用点到平面的法向量投影计算车辆当前状态点到六面体每个平面的距离,空间内一点到平面的距离为点到平面上任意一点的向量投影长度,即到每个平面的距离
23、步骤53、最终的距离为车辆当前状态点到六个平面距离的最小值,即:
24、vsm=min(d1,d2,d3,d4,d5,d6);
25、其中,di为点到第i个平面的距离。
26、进一步的,所述步骤5中,对车辆侧翻指标进行计算以及对预警阈值进行确定,定义由侧倾角和侧倾角速度组成的侧倾指数vri作为车辆防侧翻控制与预警控制基础,vri的计算公式如下:
27、
28、其中,为侧倾角,为侧倾角速度,为侧倾阻尼系数,ms为簧载质量,hs为车辆质心到侧倾中心距离,hr为侧倾中心距地距离,hu为非簧载质量重心高度,g为重力加速度,mu为非簧载质量,为悬架侧倾角刚度。
29、进一步的,所述步骤6中,模型预测控制器的代价函数如下所示:
30、minj(y(k),u(k),ρε2,n)=min(ψ1j1+ψ2j2+ψ3j3+ρε2);
31、其中基于当前时刻k的预测输出y(k)和最优控制输入序列u(k)如下式:
32、
33、j2=||yroll(k+1|k)||2;
34、j3=||uk||2=δδf2+δtfl2+δtfr2+δtrl2+δtrr2;
35、其中,yroll(k+1|k)为表示侧倾程度的函数,计算公式如下:
36、
37、对车辆施加安全性约束如下:
38、
39、其中,ρε2为松弛因子,n为预测时域,ψ1为跟踪预期目标值部分的权重系数矩阵,ψ2为控制侧倾部分的权重系数矩阵,ψ3为控制量增量部分的权重系数矩阵,β*为质心侧偏角参考值,ω*为横摆角速度参考值,为侧倾角参考值,βm为质心侧偏角最大值,ωm为横摆角速度最大值,为侧倾角最大值,β为质心侧偏角,ω为横摆角速度,为侧倾角,μ为路面附着系数,g为重力加速度,vx为纵向速度,δδf为附加前轮转角,δtfl为左前轮附加转矩,δtfr为右前轮附加转矩,δtrl为左后轮附加转矩,δtrr为右后轮附加转矩,ωxyz为三维稳定空间。
40、与现有技术相比,本发明的有益效果是:
41、1、本发明在传统的二维相平面判断车辆稳定性的基础上,引入了侧倾角对车辆稳定性的影响,扩展了稳定性判断依据,实现车辆质心侧偏角、横摆角速度和侧倾角在三维空间信息上的融合。三维状态信息可以互相验证,打破了传统二维相平面分析方法的低可靠性和局限性。特别是在复杂的工况下,该方法能够更加准确、全面地评估车辆稳定性,并且具有更强的鲁棒性。
42、2、本发明提出了一种在“横向速度-横摆角速度-侧倾角”三维空间内确定一个六面体稳定区域的新方法,克服了传统方法中以直线或包络线等方式划分稳定区域边界的局限性。通过建立高维度的稳定空间,能够更全面地捕捉车辆的状态特征,并进一步挖掘车辆侧倾控制在提高稳定性方面的潜力,为判断车辆稳定性提供了新的途径。
43、3、本发明提出了一种量化车辆稳定性的性能指标,该指标考虑了车辆在实际行驶过程中侧倾对于稳定性的影响,从而提高了分析过程的全面性、准确性和预测性。这有助于预防潜在的事故或失控情况,并为改进车辆稳定性设计和驾驶控制系统提供了更准确的参考指标。
44、4、本发明利用人工神经网络对驾驶员在转向时的驾驶风格进行分析识别,将驾驶风格归为保守型、稳定性、激进型三类。这种方法对于适应驾驶员的操纵工况和优化车辆动力学特性等方面具有重要意义,并在稳定区域划分时考虑到驾驶员驾驶风格的影响因素,对于不同的驾驶风格会选择相应的稳定区域。
45、5、本发明基于模型预测控制设计稳定性控制器,以实现对多目标的优化求解,达到车辆的最优动力响应,在激烈驾驶工况下可以提升车辆的响应速度。这种控制策略在动态协调多项安全性能要求的同时,也可以提高在复杂工况下车辆行驶的主动安全性和整体稳定性。
本文地址:https://www.jishuxx.com/zhuanli/20240830/282911.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表