一种天车无人指吊方法、系统、存储介质及计算机设备与流程
- 国知局
- 2024-09-05 14:18:29
本发明涉及天车控制,具体而言,涉及一种天车无人指吊方法、系统、存储介质及计算机设备。
背景技术:
1、天车,即桥式起重机,是炼钢厂铁水罐和钢水罐吊装液态金属的运输工具。天车操作人员一般在天车大梁一端下方的司机室操作,由于位置、高空、环境等因素,天车操作人员视野受限,无法对铁水罐或钢水罐两侧耳轴的天车龙门钩情况直接观察,只能通过地面指吊人员的配合指挥才能完成整个起吊动作。
2、当天车龙门钩接近铁水罐或钢水罐耳轴时,地面指吊人员根据其目测,向天车司机发出手势、口哨指令,天车操作人员根据地面指吊人员的指令进行操作。由于天车操作人员与地面人员的配合操作可能存在双方的确认不到位、双方的沟通信息失真以及环境影响等原因,存在天车龙门钩未与铁水罐耳轴或钢水罐耳轴正确连接,引起的铁水、钢水罐倾翻洒落液态金属的情况,且铁水罐或钢水罐内装有1300℃以上高温液态金属,极易发生重大安全风险。
技术实现思路
1、本发明解决的问题是如何避免天车龙门钩未与铁水罐耳轴或钢水罐耳轴正确连接,引起的铁水、钢水罐倾翻洒落液态金属的情况。
2、为解决上述问题,第一方面,本发明提供一种天车无人指吊方法,包括:
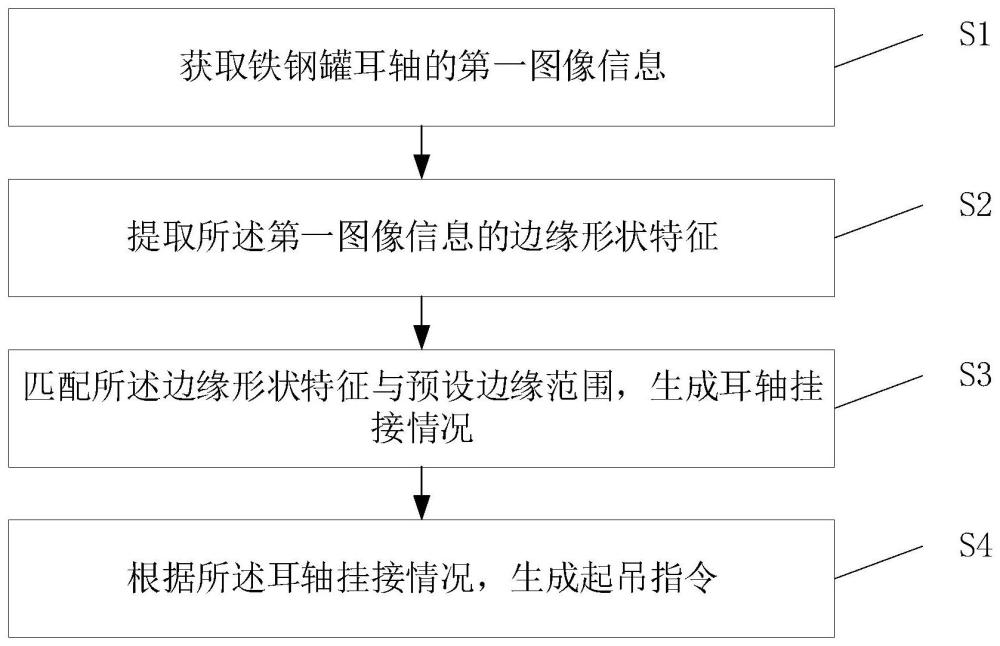
3、获取铁钢罐耳轴的第一图像信息;
4、提取所述第一图像信息的边缘形状特征;
5、匹配所述边缘形状特征与预设边缘范围,生成耳轴挂接情况;
6、根据所述耳轴挂接情况,生成起吊指令。
7、可选地,所述提取所述第一图像信息的边缘形状特征,包括:
8、根据所述第一图像信息,采用sobel算子,生成梯度幅值图;
9、对所述梯度幅值图进行非极大值抑制,生成细化梯度幅值图;
10、提取所述细化梯度幅值图的强边缘特征,并根据所述强边缘特征,生成所述边缘形状特征。
11、可选地,在所述根据所述耳轴挂接情况,生成起吊指令之后,还包括:
12、获取起吊中所述铁钢罐耳轴的起吊数据;
13、根据所述起吊数据,生成天车控制指令。
14、可选地,所述起吊数据包括第二图像信息,所述根据所述起吊数据,生成天车控制指令,包括:
15、根据所述第二图像信息,提取所述铁钢罐两侧耳轴之间的高度差值;
16、当所述两侧高度差值大于预设高度差值时,生成停止运行指令,并生成错误警报。
17、可选地,所述起吊数据包括重量数据,所述根据所述起吊数据,生成天车控制指令,包括:
18、根据所述重量数据,确定所述铁钢罐两侧耳轴之间的重量差值;
19、当所述重量差值大于预设重量差值时,生成停止运行指令,并生成错误警报。
20、可选地,在所述根据所述耳轴挂接情况,生成起吊指令之后,还包括:
21、获取所述铁钢罐的起始位置、目的位置以及障碍物;
22、根据所述起始位置、所述目的位置以及所述障碍物,生成吊装规划路径;
23、根据所述吊装规划路径和所述起吊指令,吊装所述铁钢罐。
24、可选地,所述根据所述耳轴挂接情况,生成起吊指令,包括:
25、当所述耳轴挂接情况为挂接成功时,生成允许起吊指令;
26、当所述耳轴挂接情况为挂接失败时,生成禁止起吊指令和挂接失败警报。
27、第二方面,本发明提供一种天车无人指吊系统,包括:
28、获取模块,用于获取铁钢罐耳轴的第一图像信息;
29、提取模块,用于提取所述第一图像信息的边缘形状特征;
30、匹配模块,用于匹配所述边缘形状特征与预设边缘范围,生成耳轴挂接情况;
31、指令模块,用于根据所述耳轴挂接情况,生成起吊指令。
32、第三方面,本发明提供一种计算机可读存储介质,所述存储介质上存储有计算机程序,当所述计算机程序被处理器执行时,实现如上所述的天车无人指吊方法。
33、第四方面,本发明提供一种计算机设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,当所述处理器执行所述计算机程序时,实现如上所述的天车无人指吊方法。
34、本发明的一种天车无人指吊方法、系统、存储介质及计算机设备的有益效果为:
35、通过获取铁钢罐耳轴的第一图像信息,可以准确地描述铁钢罐和耳轴的边缘形状,便于后续分辨耳轴与天车龙门钩的钩挂情况,再通过提取边缘形状特征,匹配边缘形状特征与预设边缘范围,生成耳轴挂接情况,可以实现对耳轴挂接情况的实时监测和判断,减少了人工劳动力成本和时间消耗,同时降低了由于人工失误和环境因素等原因造成的挂接失败情况发生,便于及时发现问题并采取相应措施。最后根据耳轴挂接情况生成起吊指令,可以直接指导操作员进行调整和处理,减少错误率,提高生产效率和安全性,能够避免因天车龙门钩未与铁水罐耳轴或钢水罐耳轴正确连接,引起的铁水、钢水罐倾翻洒落液态金属的问题。
技术特征:1.一种天车无人指吊方法,其特征在于,包括:
2.根据权利要求1所述的天车无人指吊方法,其特征在于,所述提取所述第一图像信息的边缘形状特征,包括:
3.根据权利要求1所述的天车无人指吊方法,其特征在于,在所述根据所述耳轴挂接情况,生成起吊指令之后,还包括:
4.根据权利要求3所述的天车无人指吊方法,其特征在于,所述起吊数据包括第二图像信息,所述根据所述起吊数据,生成天车控制指令,包括:
5.根据权利要求3所述的天车无人指吊方法,其特征在于,所述起吊数据包括重量数据,所述根据所述起吊数据,生成天车控制指令,包括:
6.根据权利要求1所述的天车无人指吊方法,其特征在于,在所述根据所述耳轴挂接情况,生成起吊指令之后,还包括:
7.根据权利要求1所述的天车无人指吊方法,其特征在于,所述根据所述耳轴挂接情况,生成起吊指令,包括:
8.一种天车无人指吊系统,其特征在于,包括:
9.一种计算机可读存储介质,其特征在于,所述存储介质上存储有计算机程序,当所述计算机程序被处理器执行时,实现如权利要求1至7任一项所述的天车无人指吊方法。
10.一种计算机设备,其特征在于,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,当所述处理器执行所述计算机程序时,实现如权利要求1至7任一项所述的天车无人指吊方法。
技术总结本发明提供一种天车无人指吊方法、系统、存储介质及计算机设备,涉及天车控制技术领域,天车无人指吊方法包括:获取铁钢罐耳轴的第一图像信息;提取所述第一图像信息的边缘形状特征;匹配所述边缘形状特征与预设边缘范围,生成耳轴挂接情况;根据所述耳轴挂接情况,生成起吊指令。本发明的天车无人指吊方法可以对耳轴挂接情况的实时监测和判断,减少了人工劳动力成本和时间消耗,同时降低了由于人工失误和环境因素等原因造成的挂接失败情况发生,减少错误率,提高生产效率和安全性,解决了天车龙门钩未与铁水罐耳轴或钢水罐耳轴正确连接,引起的铁水、钢水罐倾翻洒落液态金属的问题。技术研发人员:裘韶均,董新龙,郝于平,郭小良,何腾,贾国樑,何天明受保护的技术使用者:宁波钢铁有限公司技术研发日:技术公布日:2024/9/2本文地址:https://www.jishuxx.com/zhuanli/20240905/285689.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。