一种超视距海上船舶识别方法
- 国知局
- 2024-09-05 14:26:32
本发明涉及海上船舶识别,具体涉及一种超视距海上船舶识别方法。
背景技术:
1、随着航运业的迅猛发展,船舶的数量变得更加庞大,种类也越来越多。因此,船舶的分类也存在许多的方法。根据船舶用途分类,船舶通常可分为:运输船、工程船、渔业船、港务船、海洋调查船和军用船舶。根据航行区域的不同,可划分为:海船(沿海、近海、远洋)、港湾船和内河船。目前,基于图像的船舶识别技术安照实现手段可以分为两种:基于机器学习的船舶识别技术和基于深度学习的船舶识别技术。
2、基于机器学习方法的识别是人们研究最多的一种方法,该方法比较灵活、部署快、训练测试容易、学习和研究成本较低;但是其依赖于人工设计的特征,不仅出现了鲁棒性差的问题,而且算法的时间复杂度也无法保障。
3、基于深度学习的识别方法主要是基于卷积神经网络发展起来的一种方法,其能更好的提取出船舶目标的边界轮过和高级特征。但该方法对计算设备、存储设备和数据集要求过高,对个人而言,学习和研究成本较高,应用通常是基于云计算环境部署。
4、图像特征是船舶识别的重要标识。船舶目标检测中,一般采用可区分性强、独立性和可靠性好的特征选取原则。图像目标特征包括纹理特征、颜色特征、形状特征和空间关系特征等等。对于船舶识别来说,常用的特征包括颜色特征和形状特征两大类。颜色特征主要包括亮度、灰度、对比度和颜色直方图;形状特征主要包括边缘、中心点、区域、局部、目标轮廓、中心至目标边界最近、最远距离点、矩特征、高度、长度、周长、面积、细长度、长短轴、主轴方向、实心度、目标长轴与图像x轴夹角和hog特征等。
5、综上所述,目前的船舶识别主要是基于一些静态的数据或者图片进行处理,缺乏动态特征,容易受到人工设计特征集质量的高低、环境的复杂程度和深度学习数据量的丰富程度的影响,从而影响识别结果的准确性。
6、另外,现有技术中ais系统覆盖的船舶范围非常广泛,目前全球任何500总吨以上的船舶都强制安装ais系统,但其发射的信号传输距离有限,存在监控盲区,且ais系统对船舶位置数据更新并非是一直持续的,不能实现实时监测。ais系统为是指船舶自动识别系统(automatic identification system),它是一种用于船舶间通信和导航的技术。
技术实现思路
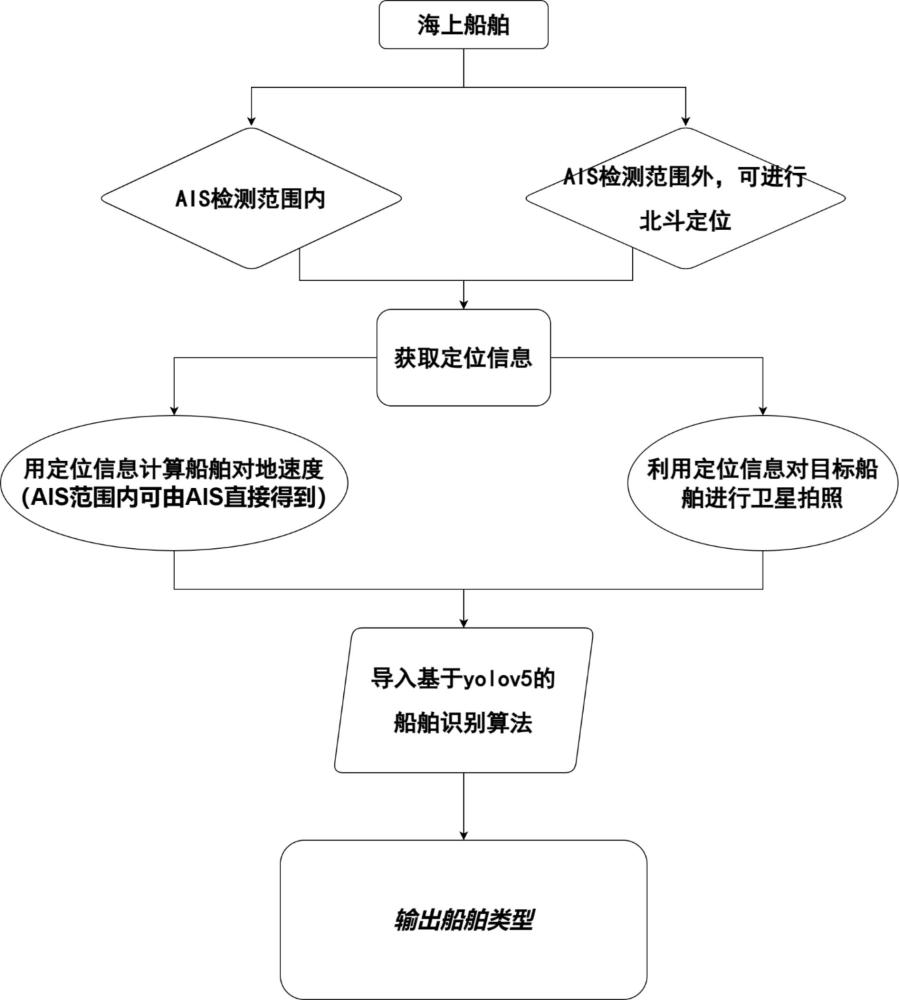
1、本发明的目的是提供一种超视距海上船舶识别方法,通过卫星系统来补足ais系统的监控盲区,能够通过卫星定位系统实时监测海上船舶航行速度,并通过卫星采集目标船舶的图片,再基于图像处理和航行速度快速识别船舶类型。
2、本发明所采用的技术方案是:
3、一种超视距海上船舶识别方法,包括以下步骤:
4、通过ais系统直接采集目标船舶的类型或通过卫星采集目标船舶的目标船舶的对地速度,通过卫星采集目标船舶的照片;
5、通过训练好的识别模型对采集到的目标船舶照片进行船舶类型识别,
6、当通过照片识别出船舶类型的置信度大于等于设定值时,直接输出船舶类型;
7、当通过照片识别出船舶类型的置信度小于设定值时,若目标船舶的航速处于识别出的船舶类型的航速区间,则认为识别出的船舶类型正确,输出识别出的船舶类型,若目标船舶的航速超出识别出的船舶类型的航速区间,则认为识别船舶类型错误,重新采集目标船舶照片和对地速度,并重新识别判断。
8、若己方船舶a与目标船舶b之间的间隔距离在ais检测范围内,己方船舶a通过船舶自动识别系统ais直接采集目标船舶b的的船舶类型;
9、若己方船舶a与目标船舶b之间的间隔距离超出ais系统监测范围或其中一个船舶未配备ais系统时,通过卫星定位系统对船舶位置进行监测,采集船舶的定位信息,并利用目标船舶的卫星定位信息通过卫星对目标船舶b进行拍照,利用两船舶的定位信息计算目标船舶b的对地速度。
10、利用船舶的定位信息还可计算两个船舶的间隔距离、目标船舶b相对于己方船舶a的相对速度和相对航向。
11、优选地,计算两船舶间隔距离的具体过程为:首先由定位系统得到两船舶的经纬度,将地球近似为一个完整的球体,以0°为分界线北纬为正,南纬为负,东经为正,西经为负将两点经纬度带入球面两点距离计算公式。
12、优选地,计算目标船舶的对地速度的具体过程为:利用北斗定位系统得到船舶的连续两次的定位经纬度,带入到球面两点距离计算公式,计算船舶移动的距离,再除以两次间隔的时间,用两次连续的定位信息计算船舶短时间内的平均速度,又由于时间间隔较短,将其当作目标船舶b的瞬时速度使用,由此便能计算目标船舶b的对地速度。
13、优选地,计算目标船舶b相对于己方船舶a的相对速度:以己方船舶a为原点,北极方向为0°方向建立极坐标系,再取连续两次己方船舶a和目标船舶b的经纬度信息,运用距离公式和计算方法计算出两次目标船舶b相对于己方船舶a的间隔距离以及方位角,再根据两次方位角之差运用余弦定理计算目标船舶b相对于己方船舶a移动的位移,用相对位移除以间隔时间即可得出目标船舶b相对于己方船舶a的相对速度。
14、优选地,通过训练好的识别模型通过改进yolov5算法对采集到的目标船舶照片进行船舶类型识别;改进yolov5算法是通过yolov5算法对目标船舶的图片识别后得到的船舶类型,再以速度为参数判断船舶类型是否符合该类型船舶的速度区间。
15、优选地,识别模型通过改进yolov5算法使用数据集的图片进行训练的具体过程为:将数据集中所有图片分为散货船、集装箱船、客船、油轮四类,然后利用数据标注软件对数据集中作为训练集的图片进行船舰标注。
16、优选地,数据集的图片来源于两部分,一部分为搜集网络上传播的船舶图片;另一部分为用摄像机定位捕捉船舶拍照。
17、优选地,置信度设定值为90%。
18、本发明的有益效果是:
19、本发明通过卫星系统来补足ais系统的监控盲区,能够通过卫星定位系统实时监测海上船舶航行速度,并通过卫星采集目标船舶的图片,再基于图像处理和航行速度快速识别船舶类型。
技术特征:1.一种超视距海上船舶识别方法,其特征在于:包括以下步骤:
2.如权利要求1所述的超视距海上船舶识别方法,其特征在于:若己方船舶(a)与目标船舶(b)之间的间隔距离在ais系统检测范围内,则通过ais系统直接采集目标船舶(b)的船舶类型;
3.如权利要求2所述的超视距海上船舶识别方法,其特征在于:利用船舶的定位信息还计算两个船舶的间隔距离、目标船舶(b)相对于己方船舶(a)的相对速度和相对航向。
4.如权利要求3所述的超视距海上船舶识别方法,其特征在于:计算两船舶间隔距离的具体过程为:首先由定位系统得到两船舶的经纬度,将地球近似为一个完整的球体,以0°为分界线北纬为正,南纬为负,东经为正,西经为负将两点经纬度带入球面两点距离计算公式。
5.如权利要求2所述的超视距海上船舶识别方法,其特征在于:计算目标船舶的对地速度的具体过程为:利用卫星定位系统得到目标船舶的连续两次的定位经纬度,带入到球面两点距离计算公式,计算目标船舶移动的距离,再除以两次间隔的时间,用两次连续的定位信息计算船舶短时间内的平均速度,又由于时间间隔较短,将其当作目标船舶(b)的瞬时速度使用,由此便能计算目标船舶(b)的对地速度。
6.如权利要求3所述的超视距海上船舶识别方法,其特征在于:计算目标船舶(b)相对于己方船舶(a)的相对速度:以己方船舶(a)为原点,北极方向为0°方向建立极坐标系,再取连续两次己方船舶(a)和目标船舶(b)的经纬度信息,运用距离公式和计算方法计算出两次目标船舶(b)相对于己方船舶(a)的间隔距离以及方位角,再根据两次方位角之差运用余弦定理计算目标船舶(b)相对于己方船舶(a)移动的位移,用相对位移除以间隔时间即可得出目标船舶(b)相对于己方船舶(a)的相对速度。
7.如权利要求1所述的超视距海上船舶识别方法,其特征在于:通过训练好的识别模型通过改进yolov5算法对采集到的目标船舶照片进行船舶类型识别。
8.如权利要求7所述的超视距海上船舶识别方法,其特征在于:识别模型通过改进yolov5算法使用数据集的图片进行训练的具体过程为:将数据集中所有图片分为散货船、集装箱船、客船、油轮四类,然后利用数据标注软件对数据集中作为训练集的图片进行船舰标注。
9.如权利要求8所述的超视距海上船舶识别方法,其特征在于:数据集的图片来源于两部分,一部分为搜集网络上传播的船舶图片;另一部分为用摄像机定位捕捉船舶拍照。
10.如权利要求1所述的超视距海上船舶识别方法,其特征在于:置信度设定值为90%。
技术总结本发明公开了一种超视距海上船舶识别方法,包括以下步骤:通过AIS系统直接采集目标船舶的类型或通过卫星采集目标船舶的目标船舶的对地速度,通过卫星采集目标船舶的和照片;通过训练好的识别模型对采集到的目标船舶照片进行船舶类型识别,当通过照片识别出船舶类型的置信度大于等于设定值时,直接输出船舶类型;置信度小于设定值时,若目标船舶的航速处于对应船舶航速区间,则认为识别出的船舶类型正确,输出识别出的船舶类型,若目标船舶的航速超出对应船舶航速区间,则认为识别船舶类型错误,重新采集目标船舶照片和对地速度,并重新识别判断。本发明通过卫星系统来补足AIS系统的监控盲区,能够通过卫星定位系统快速识别船舶类型。技术研发人员:梁棋钰,王鹏,常永涛,孙培楠,于力钧受保护的技术使用者:武汉理工大学技术研发日:技术公布日:2024/9/2本文地址:https://www.jishuxx.com/zhuanli/20240905/286504.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表