一种无人机蜂群编队协同控制的方法
- 国知局
- 2024-09-05 14:30:05
本技术涉及无人机控制,具体而言,涉及一种无人机蜂群编队协同控制的方法。
背景技术:
1、无人机技术的快速发展为军事领域带来了新的可能性,其中,蜂群战术作为一种集体协同行动的军事策略备受关注,蜂群战术利用大量的无人机编组,以集体智能和协同行动的方式实施任务。
2、蜂群编队战术作为一种集体协同行动的军事策略,利用无人机编组的集体智能和协同能力,具有广泛的军事应用前景,蜂群编队技术在军事领域的应用:
3、1)侦察与监视:探讨蜂群战术在侦察与监视任务中的应用,包括广域搜索和目标跟踪;
4、2)打击与防御:讨论蜂群战术在打击与防御任务中的潜在应用,如精确打击和防空作战;
5、3)搜救与救援:介绍蜂群战术在搜救与救援行动中的优势,包括快速搜索和远程通信。
6、但是,实施蜂群战术还面临着多种技术挑战,需要解决编组管理、通信可靠性和自主决策等问题,尽管如此,蜂群战术所带来的视觉盛宴和军事效能使其成为未来军事战争中值得关注的战术手段,随着技术的进一步发展和改进,蜂群战术有望为现代军事行动提供新的战略选择,因此,亟需一种新的控制方法,对现有存在的问题进行优化与解决。
技术实现思路
1、为了解决现有技术实施蜂群战术还面临着的编组管理、通信可靠性和自主决策的问题,本技术提供了一种无人机蜂群编队协同控制的方法。
2、本技术的实施例是这样实现的:
3、本技术提供一种无人机蜂群编队协同控制的方法,包括:
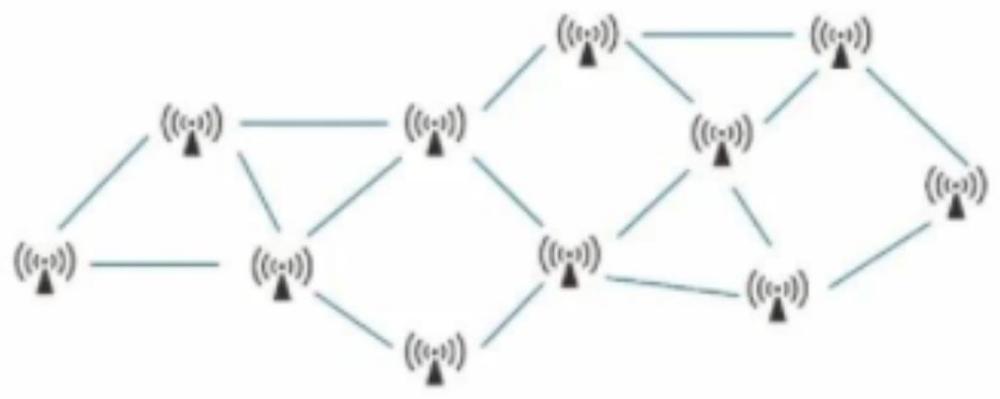
4、通讯方案:包括地面站与多个无人机组,所述无人机组内放入无人机均为mesh网络结构,组与组之间无信号关联,统一通过所述地面站进行管理,所述地面站与所述无人机组通过ap模式进行管理;
5、蜂群飞行队形设计:所述无人机组的队形采用三维相对坐标进行规划,预设坐标间距为d米,坐标间距根据无人机的安全距离进行设计,在使用rtk的情况下,所述坐标间距d最小设置为1米;
6、编队飞行方案:所述无人机组内包括主无人机与从无人机,所述无人机组在空中按照指定队形悬停待命时,通过所述地面站控制所述主无人机飞行,所述从无人机根据预设的队形,跟随所述主无人机进行移动。
7、在一种可能的实现方式中,所述通讯方案还包括:
8、所述无人机组内的无人机根据信号质量,自动选中一个主节点与所述地面站进行通讯,如遇主节点宕机后或失效,将自动由其它节点替代作为主节点与地面站通讯;
9、采用mesh+ap模式构建集群通信方案,能够适应mesh组网方式的便捷性,又能够满足ap模式的通讯距离。
10、在一种可能的实现方式中,所述蜂群飞行队型设计还包括:
11、xy轴方向表示水平方向与主无人机的偏移量,z轴方向表示高度与主无人机的偏移量,以主无人机坐标p0(0,0,0),作为基准,分别设计其它从无人机与主无人机的相对位置。
12、在一种可能的实现方式中,所述蜂群飞行队形设计还包括:
13、所述无人机组以“人”字形排列时,其中,第一从无人机的队内坐标p1为(1,-1,0),第二从无人机的队内坐标p2为(-1,-1,0),则实际的主从机的间距为s = d米,第一从无人机相对于主机朝向为135度(真北为0度,范围为0-360度),第二从无人机相对于主机朝向为225度,从而能够满足实时的编队队形变换需求。
14、在一种可能的实现方式中,所述编队飞行方案还包括:
15、在还未达到预设队形时,本系统采用3d-a*寻路算法寻找最优路径,控制无人机达到队形点位。
16、在一种可能的实现方式中,所述寻路算法包括:
17、根据当前组内无人机生成xyz三维地图world格子;
18、预设g表示从起点到达当前已经走到的路径的距离长度,h表示当前位置距离终点有多远,估计值f=g+h;
19、定义openlist表示待检测的路径节点,closelist表示已经检测过的路径节点;
20、基于所述xyz三维地图world格子,并根据无人机的初始节点与目标节点判断运动路径。
21、在一种可能的实现方式中,在所述基于所述xyz三维地图world格子,并根据无人机的初始节点与目标节点判断运动路径步骤之后,还包括:
22、基于所述寻路算法对所有无人机进行寻路,在所有无人机完成寻路后,开始引导无人机到达对应的目标点,完成无人机队形变换。
23、在一种可能的实现方式中,所述根据当前组内无人机生成xyz三维地图world格子,还包括:
24、间距为两个无人机最小安全距离d米,地图长宽为组内最外层无人机与最内无人机的3倍,地图高度为组内最低无人机高度与最高无人机高度*2,无人机当前位置分别为c1、c2、c3 …cn,无人机需要到达的目标点坐标分别为t1、t2、t3 …tn。
25、在一种可能的实现方式中,所述基于所述xyz三维地图world格子,并根据无人机的初始节点与目标节点判断运动路径,进一步包括:
26、当无人机需要从c1(x1,y1,z1)到达t1(x1’,y1’,z1’),时将初始节点c1放入到openlist列表中;
27、寻找c1六方向(前后左右上下),坐标分别为(x0,y1,z1)、(x1,y0,z1)、(x0,y0,z1)、(x1,y1,z1)、(x1,y1,z2)、(x1,y1,z0),是否存在障碍物;
28、如果可正常通过,将坐标加入到openlist列表中,同时把c1(x1,y1,z1)从openlist移除,加入到closelist列表中;
29、如果该节点被占用,存在障碍物不可通过,则加入到closelist列表中。
30、在一种可能的实现方式中,所述基于所述寻路算法对所有无人机进行寻路,在所有无人机完成寻路后,开始引导无人机到达对应的目标点,完成无人机队形变换,进一步包括:
31、从openlist中选择一个最小f值的节点,循环所述基于所述xyz三维地图world格子,并根据无人机的初始节点与目标节点判断运动路径步骤;
32、直到openlist中无节点,或者目标点t1(x1,,y1,,z1,)存在于openlist中,则说明已找到路径或无路径,对寻找的路径进行标记,其它无人机不可前往该节点;
33、并继续寻找2号无人机c2飞往t2的路径,并标记2号无人机占用,以此类推对所有无人机进行寻路;
34、所有无人机完成寻路后,开始引导无人机到达对应的t目标点,无人机完成队形变换。
35、本技术提供的技术方案至少可以达到以下有益效果:
36、本技术提供的无人机蜂群编队协同控制的方法:
37、通过采用mesh + ap 融合的方式自组网通信节点在无人机上体现为模块形式,能够随无人机移动实现动态组网,根据无人机阵型不同可以满足范围覆盖和通信延伸的不同应用场景,设备采用全ip化设计,对其他设备兼容性高;支持数据透传和串口通信,兼容不同应用场景下的需求,搭配ap模式,使得无人机与地面保存通讯的距离更远,使用起来更加灵活。
38、通过采用基础的xyz三维坐标系设计规划, 整个规划过程简单明了,可快速的规划出任意的2d、3d编队队形。
39、通过使用优化的3d-a*寻路算法进行队形变换,作为一种启发式算法,利用启发信息寻找最优路径,该算法在2d寻路基础上,增加了高度维度,该算法需要在地图中搜索节点,并设定适合的启发函数进行指导,通过评价各个节点的代价值,获取下一需要拓展的最佳节点,直至到达最终目标点位置,该算法优点在于对环境反应迅速,搜索路径直接,是一种直接的搜索算法,本技术使用无人机组内地图,减小了地图的节点数量,在寻路效率上有了提升。
本文地址:https://www.jishuxx.com/zhuanli/20240905/286803.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表