包括设置有铰接工具的提升臂的操纵机器以及用于控制该操纵机器的方法与流程
- 国知局
- 2024-09-05 14:40:47
本发明涉及包括提升臂的操纵机器的领域。本发明更具体地涉及下述操纵机器:该操纵机器包括枢转地安装在操纵机器的底盘上的提升臂和铰接在提升臂上的工具、例如铲斗或叉。
背景技术:
1、文献wo2021170929公开了一种操纵机器,该操纵机器包括围绕水平轴线枢转地安装在底盘上的提升臂。操纵机器还包括用于接纳负载的工具,例如铲斗或叉,该工具可以铰接在提升臂上。操纵机器包括提升缸,该提升缸在一个侧部上联接至底盘并在另一侧部上联接至提升臂,从而使提升臂能够绕提升臂的枢转轴线进行枢转。液压的倾斜缸设置在提升臂与工具之间,使工具能够相对于提升臂移动。倾斜缸与补偿缸流体连通,补偿缸根据提升臂相对于底盘的移位而被致动。补偿缸和倾斜缸分别作为主柱和从柱来操作,以在提升臂被升高时保持附件水平。
2、这种操纵机器并不完全令人满意。这是因为补偿缸很重且体积庞大,并且补偿缸的组装使得机器的制造复杂化。此外,补偿缸在提升臂和底盘上产生机械应力。
技术实现思路
1、本发明的核心思想之一是提出一种上述类型的操纵机器,即包括枢转安装在操纵机器的底盘上的提升臂和铰接在提升臂上的工具,该操纵机器设置有补偿装置,从而使得当提升臂被升高时,该补偿装置能够使工具相对于底盘的倾斜度保持恒定或基本恒定,并且该操纵机器更简单、更轻便、体积更小。
2、本发明的核心思想之一是提出这样一种操纵机器:该操纵机器没有补偿缸来对使工具相对于提升臂移动的倾斜缸进行控制。
3、本发明的核心思想之一还涉及提出一种对该操纵机器进行控制的方法。
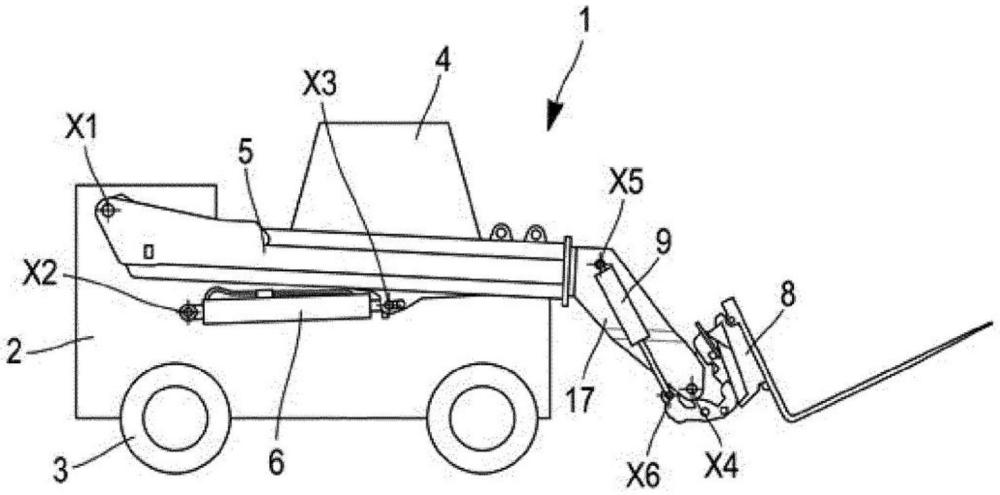
4、根据第一方面,本发明提出了一种用于对操纵机器进行控制的方法,操纵机器包括:底盘;提升臂,该提升臂围绕至少一个轴线x1在降低位置与升高位置之间枢转地安装在底盘上;提升缸,该提升缸布置成使提升臂围绕所述轴线x1在降低位置与升高位置之间枢转;第一传感器,该第一传感器配置成传送对提升臂在降低位置与升高位置之间的位置进行表示的测量信号;工具,该工具用于接纳负载并且围绕与x1平行的至少一个轴线x4枢转地安装在提升臂上;倾斜缸,该倾斜缸具有行程lincl并且布置成使工具围绕所述轴线x4枢转;第二传感器,该第二传感器配置成传送与倾斜缸的行程lincl相关的测量信号s2;至少一个致动器,至少一个该致动器配置成传送关于对提升缸进行致动的请求dlev以及传送关于对倾斜缸进行致动的请求dincl,方法包括以下步骤:
5、-接收关于对倾斜缸进行致动的请求dincl,
6、-响应于接收到关于对倾斜缸进行致动的请求dincl,启用倾斜缸的手动致动模式,倾斜缸的所述手动致动模式包括:根据关于对倾斜缸进行致动的所述请求dincl来生成与倾斜缸的行程相关的设定点lc;以及根据与倾斜缸的行程相关的所述设定点lc以及与倾斜缸的行程lincl相关的测量信号s2来提供对倾斜缸的行程lincl的闭环控制,
7、-接收关于对提升缸进行致动的请求dlev,以及
8、-响应于接收到关于对提升缸进行致动的请求,启用补偿模式,补偿模式包括下述步骤:根据对提升臂随时间变化的位置plev进行表示的测量信号s1的变化来生成与倾斜缸的行程相关的设定点lc;以及根据与倾斜缸的行程相关的所述设定点lc和与倾斜缸的行程lincl相关的测量信号s2来提供对倾斜缸的行程lincl的闭环控制。
9、因此,这种方法使得可以对倾斜缸进行电控制,从而补偿提升臂的上下运动,而无需使用体积庞大、重量沉重且容易在提升臂和底盘上产生机械应力的补偿缸。
10、根据一些实施方式,这种操纵机器可以表现出以下特征中的一个或更多个特征。
11、根据一个实施方式,响应于接收到关于对提升缸进行致动的请求,该方法根据请求dlev生成提升缸的移位设定点,并且根据由此生成的设定点控制提升缸。
12、根据一个实施方式,该工具是铲斗或叉。
13、根据一个实施方式,补偿模式包括:对于每个连续时间段t,根据在时间段t的开始和结束时分别传送的与提升臂的位置plev相关的两个测量信号s1,对与提升臂在时间段t期间围绕轴线x1的角位移相对应的角度变化δα进行确定,以及在随后的时间段期间,根据与前一时间段相对应的角度变化δα来生成与倾斜缸的行程相关的设定点lc,并且根据所述设定点lc对倾斜缸的行程lincl进行闭环控制。
14、根据一个实施方式,由第一传感器传送的测量信号s1与提升臂在与轴线x1正交的平面中相对于参考轴线的倾斜角α有关。
15、根据一个实施方式,控制方法包括将每个新生成的与倾斜缸的行程相关的设定点lc赋予变量l0,其中,在补偿模式下,与倾斜缸的行程相关的设定点lc根据角度变化δα以及根据l0来生成。这消除了或者至少限制了与倾斜缸的长度的闭环控制相关的累积错误。
16、根据一个实施方式,在补偿模式下,与倾斜缸的行程相关的设定点lc根据角度变化δα以及根据l0来生成,使得对于缸的行程在l0与lc之间的变化而言,与工具围绕轴线x4的角位移相对应的角度变化δβ具有与角度变化δα相同的值和相反的符号。
17、根据一个实施方式,倾斜缸的行程lincl由pid控制器进行闭环控制。
18、根据一个实施方式,响应于接收到关于对倾斜缸进行致动的请求dincl而停用补偿模式。
19、根据一个实施方式,将与倾斜缸的行程lincl相关的测量信号s2与分别对应于倾斜缸的完全缩回位置和完全延伸位置的阈值长度lmin和阈值长度lmax进行比较,并且如果倾斜缸的行程lincl等于阈值长度lmin和lmax中的一者,则停用补偿模式。
20、根据一个实施方式,如果补偿模式被停用,则生成报警信号。
21、根据一个实施方式,在补偿模式下,将与倾斜缸的行程lincl相关的测量信号s2与第一阈值l1和第二阈值l2进行比较,第一阈值l1大于与倾斜缸完全缩回位置相对应的阈值长度lmin,第二阈值l2大于第一阈值l1并且小于与倾斜缸的完全延伸位置相对应的阈值长度lmax,如果倾斜缸的行程lincl小于第一阈值l1或大于第二阈值l2,则对提升臂围绕轴线x4的角枢转速度进行限制。
22、根据第二方面,本发明还提出了一种操纵机器,该操纵机器包括:底盘;提升臂,该提升臂围绕至少一个轴线x1在降低位置与升高位置之间枢转地安装在底盘上;提升缸,该提升缸布置成使提升臂围绕轴线x1在降低位置与升高位置之间枢转;第一传感器,该第一传感器配置成传送对提升臂在降低位置与升高位置之间的位置进行表示的测量信号s1;工具,该工具用于接纳负载并且围绕与x1平行的至少一个轴线x4枢转地安装在提升臂上;倾斜缸,该倾斜缸具有行程lincl并且被布置成使工具围绕所述轴线x4枢转;第二传感器,该第二传感器配置成传送与倾斜缸的行程lincl相关的测量信号s2;至少一个致动器,至少一个该致动器配置成传送关于对提升缸进行致动的请求dlev以及传送关于对倾斜缸进行致动的请求dincl;以及控制单元,
23、该控制单元配置成:
24、-接收测量信号s1和测量信号s2、请求dlev和请求dincl;
25、-响应于接收到关于对倾斜缸进行致动的请求dincl,启用倾斜缸的手动致动模式,倾斜缸的所述手动致动模式包括:根据关于对倾斜缸进行致动的请求dincl来生成与倾斜缸的行程相关的设定点lc;以及根据与倾斜缸的行程相关的所述设定点lc以及与倾斜缸的行程lincl相关的测量信号s2来提供对倾斜缸的行程lincl的闭环控制,以及
26、-响应于接收到关于对提升缸进行致动的请求,启用补偿模式,补偿模式包括下述步骤:根据对提升臂的位置plev进行表示的测量信号s1的变化来生成与倾斜缸的行程相关的设定点lc;以及根据与倾斜缸的行程相关的所述设定点lc和与倾斜缸的行程lincl相关的测量信号s2来提供对倾斜缸的行程lincl的闭环控制。
27、根据一个实施方式,操纵机器包括液压控制回路,该液压控制回路配置成对提升缸和倾斜缸进行控制,控制单元配置成对液压控制回路进行控制。
28、根据一个实施方式,液压控制回路包括罐、泵和流量分配器,所述流量分配器配置成使来自泵的液压流体选择性地与提升缸和/或倾斜缸连通。
29、根据一个实施方式,控制单元配置成使得在补偿模式下:
30、-对于每个连续时间段t,根据分别在时间段t的开始和结束时传送的与提升臂的位置plev相关的两个测量信号s1,对与提升臂在时间段t期间围绕轴线x1的角位移相对应的角度变化δα进行确定,以及
31、-在随后的时间段期间,根据与前一个时间段相对应的角度变化δα来生成与倾斜缸的行程相关的设定点lc,并根据所述设定点lc来控制倾斜缸的行程lincl。
32、根据一个实施方式,控制单元配置成:
33、-将每个新生成的与倾斜缸的行程相关的设定点lc赋予变量l0,以及
34、-在补偿模式下,根据角度变化δα以及根据l0,生成与倾斜缸的行程相关的设定点lc。
本文地址:https://www.jishuxx.com/zhuanli/20240905/287612.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。