一种内窥镜及内窥镜转动角度的控制方法与流程
- 国知局
- 2024-09-05 14:51:21
本发明涉及内窥镜,特别涉及一种内窥镜及内窥镜转动角度的控制方法。
背景技术:
1、内窥镜作为一种可以观察狭小空间的仪器,广泛应用于医疗领域和工业领域。例如,医生可以通过胃肠镜来检查人体内部的肠胃系统是否发生病变,从而提高医生对疾病的诊断正确度。
2、在复杂的工业检测现场或医疗应用场景下,为了使内窥镜的摄像头能够捕捉到更全面的图像信息,因此需要使摄像头能够实现360度的观察视角。
3、在现有技术中,传统的内窥镜虽然可以实现360度的方向调整,但是仍然具有一些缺陷:
4、(1)、传统的内窥镜采用人工驱动拉力机构中的钢丝绳来调整摄像头的观察方向,因此传统的内窥镜在调整方向的过程中较为费力;
5、(2)由于传统的内窥镜是通过直接拉紧钢丝绳来锁定方向的,因此传统的内窥镜在锁定方向时比较费力;
6、(3)由于传统的内窥镜是通过采用钢丝绳来实现锁定,锁定时的锁止力作用在钢丝绳上,因此传统的内窥镜对钢丝绳的寿命具有较大的损害,从而降低钢丝绳的使用寿命;
7、(4)传统的内窥镜在需要观察新目标时,主要是通过操作按键或者通过设置延迟时间来重新锁定新目标,这样会使得传统的内窥镜在需要观察新目标时不仅不方便,而且较为缓慢。
技术实现思路
1、本发明提供的内窥镜及内窥镜转动角度的控制方法,旨在解决现有内窥镜及内窥镜转动角度的控制方法的至少一个缺陷。
2、第一方面,本发明提供了一种内窥镜。所述内窥镜包括:
3、内窥镜本体、摄像头和转向装置;所述转向装置被装配在所述内窥镜本体上;
4、所述转向装置包括:控制组件、拉力机构和蛇骨镜头连接件;所述拉力机构包括:具有自锁部的步进舵机、转轮部件以及钢丝绳;
5、所述控制组件的至少局部与所述步进舵机相连接,以控制所述步进舵机按预设的情形转动至任一角度;
6、所述转轮部件连接于所述步进舵机;所述钢丝绳的一端连接至所述蛇骨镜头连接件,另一端连接于所述转轮部件;
7、所述钢丝绳可跟随所述转轮部件的转动而缠绕在所述转轮部件的至少局部上,以驱动所述蛇骨镜头连接件的转动;
8、所述摄像头套设在所述蛇骨镜头连接件上,以使所述摄像头可跟随所述蛇骨镜头连接件的转动而转动;
9、其中,在所述控制组件、所述拉力机构和所述蛇骨镜头连接件的相互配合下,允许所述摄像头在任一角度处被锁定或解除锁定。
10、在一些实施例中,所述控制组件包括:
11、摇杆、控制板和处理器;
12、所述摇杆与所述控制板相连接,且所述控制板可根据所述摇杆的摇动幅度获取若干组模拟信号;
13、所述处理器分别连接于所述控制板和所述步进舵机,且用于接收和处理若干组所述模拟信号,并形成用于控制所述步进舵机驱动所述转轮部件收缩所述钢丝绳的长度,以带动所述蛇骨镜头连接件转动的若干组数字信号;
14、其中,每一组所述数字信号经所述处理器处理后均可形成一组数字信号稳定值。
15、在一些实施例中,所述摇杆可在预设范围内摇动;所述控制组件还包括:
16、定时器;所述定时器与所述处理器相连接,且所述定时器设置有预设时间;
17、当所述摇杆在所述预设范围内停止摇动时,所述定时器启动且形成第一时间;若所述第一时间超过所述预设时间,则所述处理器控制所述自锁部限制所述步进舵机的伸出轴转动;
18、当所述摇杆在所述预设范围内进行摇动时,所述第一时间被所述处理器执行清零指令,以使所述步进舵机的伸出轴解除锁定。
19、在一些实施例中,所述步进舵机包括:舵机主体和伸出轴;所述转轮部件包括:
20、基壳;所述基壳通过装配连接件固定连接于所述舵机主体;
21、转轮;所述转轮嵌设在所述基壳内,且与所述伸出轴相连接,以使所述转轮可跟随所述伸出轴的转动而转动;
22、微调转齿;所述微调转齿嵌设在所述转轮上,且所述微调转齿的轴线垂直于所述转轮的轴线;
23、所述钢丝绳分别绕设于所述微调转齿和所述转轮上,且所述转轮的径向尺寸大于所述微调转齿的径向尺寸;
24、微调旋钮;所述微调旋钮与所述微调转齿相连接,且用于驱动所述微调转齿转动;
25、其中,所述钢丝绳的长度可跟随所述微调转齿和所述转轮的转动而收缩,以提供驱动所述蛇骨镜头连接件转动的作用力。
26、在一些实施例中,在所述转轮停止转动时,所述摄像头被锁定在任意一个第一角度;
27、当转动所述微调旋钮时,所述摄像头可在位于所述第一角度的基础上,通过所述微调转齿的转动而对所述摄像头的转动角度进行调整。
28、在一些实施例中,所述内窥镜本体包括:
29、壳体部件;所述摇杆固定在所述壳体部件上,且所述步进舵机、所述转轮部件、所述钢丝绳的至少局部和所述控制组件均被收容在所述壳体部件的内部;
30、插入管;所述插入管包括:直筒部和蛇骨部;所述直筒部的一端连接至所述壳体部件,另一端与所述蛇骨部的一端相连接;所述蛇骨部的另一端与所述蛇骨镜头连接件相抵接;
31、其中,所述蛇骨部具有适配于所述摄像头转动至任一角度的转动性。
32、在一些实施例中,所述蛇骨部包括:
33、蛇骨珠子和若干个蛇骨环;在任意两个相邻的所述蛇骨环之间均匀地布置若干个蛇骨珠子;
34、其中,所述蛇骨珠子与所述蛇骨环相连接,用于支撑两个相邻的所述蛇骨环以及导引所述蛇骨部的转动方向。
35、在一些实施例中,所述处理器可将若干组所述数字信号稳定值转换为所述步进舵机的脉宽值;
36、所述蛇骨部的蛇骨珠子具有通孔,且所述钢丝绳可穿过所述蛇骨珠子的通孔;
37、其中,所述步进舵机可通过电力驱动,以使所述钢丝绳沿第一方向卷绕在所述转轮上;所述步进舵机的自锁部可用于提供限制所述转轮沿第二方向转动的锁止力;
38、其中,所述第一方向为卷绕所述钢丝绳的方向;所述第二方向为与所述第一方向相反的方向。
39、在一些实施例中,一组所述数字信号稳定值包括:
40、adx,用于控制所述摇杆沿第一轴线在所述预设范围内摇动;
41、ady,用于控制所述摇杆沿第二轴线在所述预设范围内摇动;
42、其中,所述第一轴线和所述第二轴线相互正交。
43、第二方面,本发明提供了一种内窥镜转动角度的控制方法。所述内窥镜转动角度的控制方法包括:
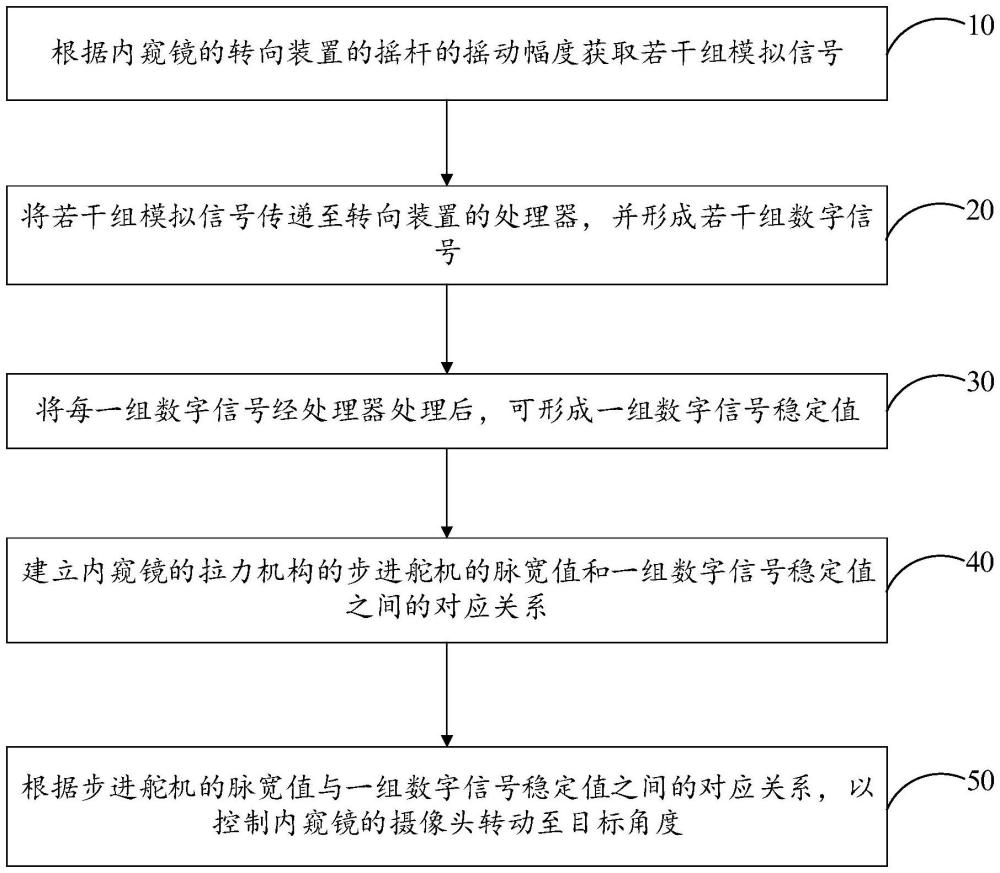
44、根据上述的内窥镜的转向装置的摇杆的摇动幅度获取若干组模拟信号;
45、将若干组所述模拟信号传递至所述转向装置的处理器,并形成若干组数字信号;
46、将每一组所述数字信号经所述处理器处理后,可形成一组数字信号稳定值;
47、建立所述内窥镜的拉力机构的步进舵机的脉宽值和一组所述数字信号稳定值之间的对应关系;
48、根据所述步进舵机的脉宽值与一组所述数字信号稳定值之间的对应关系,以控制所述内窥镜的摄像头转动至目标角度。
49、在一些实施例中,所述摇杆可在预设范围内摇动;所述建立所述内窥镜的拉力机构的步进舵机的脉宽值和一组所述数字信号稳定值之间的对应关系包括:
50、当所述摇杆在所述预设范围内进行摇动时形成的第一对应关系;
51、当所述摄像头在被锁定于任意一个第一角度的基础上,继续对所述摄像头的转动角度进行调整时形成的第二对应关系。
52、在一些实施例中,所述第一对应关系为:
53、
54、
55、其中,pwmx1为所述摄像头转动至所述第一角度,且在第一轴线上时,所述步进舵机所对应的脉宽值;pwmy1为所述摄像头转动至所述第一角度,且在第二轴线上时,所述步进舵机所对应的脉宽值;pwm_max为所述舵机的最大脉宽值;pwm_min为所述舵机的最小脉宽值;adx1为控制所述摇杆沿第一轴线运动至所述第一角度的数字信号稳定值;ady1为控制所述摇杆沿第二轴线运动至所述第一角度的数字信号稳定值;ad_min1为adx1和ady1之间的最小值;ad_max1为adx1和ady1之间的最大值。
56、在一些实施例中,所述第二对应关系为:
57、
58、
59、其中,pwmx2为所述摄像头在被锁定于所述第一角度的基础上,且沿第一轴线继续调整所述摄像头的转动角度时,所述步进舵机所对应的脉宽值;pwmy2为所述摄像头在被锁定于所述第一角度的基础上,且沿第二轴线继续调整所述摄像头的转动角度时,所述步进舵机所对应的脉宽值;adx_mc为所述摇杆位于所述第一角度上,且在第一轴线上的数字信号稳定值;ady_mc为所述摇杆位于所述第一角度上,且在第二轴线上的数字信号稳定值;adx2为控制所述摇杆在所述第一角度的基础上,且沿第一轴线继续调整所述步进舵机的转动角度的数字信号稳定值;ady2为控制所述摇杆在所述第一角度的基础上,且沿第二轴线继续调整所述步进舵机的转动角度的数字信号稳定值;ad_min2为adx2和ady2之间的最小值;ad_max2为adx2和ady2之间的最大值;ad_mid为位于所述预设范围的中心位置处的数字信号稳定值;pwm_max为所述步进舵机的最大脉宽值;pwm_min为所述步进舵机的最小脉宽值。
60、本发明实施例所提供的内窥镜及内窥镜转动角度的控制方法的至少一个有益效果是:提出一种新型的内窥镜结构以及内窥镜转动角度的控制方法,通过将钢丝绳的一端连接于套设有摄像头的蛇骨镜头连接件,将钢丝绳的另一端连接至转轮部件;钢丝绳的长度可跟随转轮部件的转动而收缩,以拉紧钢丝绳,最后将转轮部件与步进舵机相连接,该步进舵机通过电力驱动,可以获得较为省力的方式来拉紧钢丝绳,且该步进舵机具有自锁部,因此可将锁定摄像头时所需的锁止力作用在步进舵机上,从而可以有效的延长钢丝绳的使用寿命;根据本用内窥镜转动角度的控制方法可知,该步进舵机可根据摇杆的摇动幅度来控制其脉宽值,从而有效的将摄像头转动至目标角度,以使本内窥镜可以方便快捷的观察新目标。
本文地址:https://www.jishuxx.com/zhuanli/20240905/288492.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表