电动汽车轨迹跟踪和横向稳定性控制方法、装置及存储介质
- 国知局
- 2024-09-05 14:51:25
本发明属于电动汽车,具体涉及一种电动汽车的轨迹跟踪和横向稳定性集成控制方法、装置及存储介质。
背景技术:
1、为充分发挥分布式驱动的优势,使底盘动力学控制系统能够协调工作和发挥最大工作效能,设计一种行之有效的稳定性控制方法成为研究的重点。基于各控制功能对车辆动力学影响的方向不同,车辆稳定性控制可分为纵向动力学控制(沿车身纵轴线方向,主要包括驱动、制动子系统),垂向动力学控制(沿垂直大地方向,主要包括悬架子系统),侧向动力学控制(沿垂直于纵向及垂向所在面方向,包括转向子系统)三大类。纵向稳定性控制主要通过牵引力控制(tcs),驱动防滑控制,(asr)、防抱死制动控制(abs)等技术。直接横摆力矩控制(dyc)和主动前轮转向控制(afs),是车辆横向(横摆)稳定性的常用方法。传统dyc需要通过abs系统在两侧车轮施加不同大小的制动力,从而形成一个作用在车身的直接横摆力矩,实现横摆稳定性控制。主动悬架控制(as)防侧翻控制(arc)则分别在车辆的垂向及侧倾运动上有着较强的影响关系。
2、随着线控转向、线控驱动及线控制动技术的不断成熟,底盘综合动力学控制理论与技术快速发展,自动驾驶车辆的动力学控制逐步向集成控制方向发展。为进一步提高自动驾驶车辆动力学控制效果,需要考虑车辆横向、纵向及垂向运动的耦合特性。文献基于lqr方法提出了afs与dyc的纵向和侧向稳定性协调控制策略,该方法建立了轮胎侧偏刚度与路面附着系数的函数关系,并通过质心侧偏角—质心侧偏角速度建立相平面来划分两个子系统的工作区间。在轮胎-路面作用下,横向稳定性和侧倾稳定性之间同样存在控制变量的耦合影响。文献采用集中式控制框架设计了考虑横纵向及侧倾的mpc控制器,基于侧翻指标设计了变权重系数以实现各目标协同。由于车辆各向运动的强耦合性,如只对其中之一进行单独控制,则难以兼顾总体的行驶效果,所以需要针对分布式驱动底盘域控制器进一步研究多任务、多目标的协同控制问题。然而在协同控制过程中,针对不同目标的控制之间必然存在冲突,因此需对各目标间的协同控制方法进行深入探讨。当前研究中解决协同控制问题主要包括分布式控制架构和分层式控制架构。分布式控制对多个任务和目标设计多个控制器,利用基于所设计的稳定性参数等建立的阈值法切换当前工作控制器,从而切换控制目标实现协同控制。分层式控制框架通过设计多级控制器,其控制指令由上往下越来越详细,反馈信息由下往上传越来越精练,各层次的监控机构有隶属关系,因此在分层控制架构在底盘域控制中应用最为广泛。
3、近年来,四轮独立驱动汽车的轨迹跟踪与稳定性的协调控制问题也受到研究者们关注。文献针对四轮独立驱动车辆以侧向位置偏差、航向偏差为输出量,以前轮转角、额外横摆力矩为控制量设计上层mpc控制器,并设计下层轮胎力分配控制律对额外横摆力矩进行分配,相比于采用pid上层轨迹跟踪控制与lqr下层力矩分配的联合控制器取得了更高的侧向位置以及航向角的跟踪精度。国内江苏大学陈龙团队针对四轮驱动-前轮转向智能汽车提出一种基于非线性模型预测控制(nmpc)的轨迹跟踪控制方法。采用分层控制的方法,上层控制器基于nmpc计算出期望的纵向力、侧向力和横摆力矩,下层控制器基于障碍函数法求解出四轮轮胎力的最优分配,在大曲率转弯工况下证明了所提出的纵横向综合轨迹跟踪控制方法跟踪精度和行驶稳定性都有提升。文献针对预测模型在预测时域内的累积误差问题,通过构建一致性优化问题,构建mpc优化问题的时域分解更新求解方法,并通过应用四自由度非线性车辆动力学模型,提高了预测模型精度和控制效果。通过综合考虑分布式驱动汽车轨迹跟踪的准确性和侧向、横摆、侧倾稳定性,建立了分层控制结构,实现了分布式驱动电动客车的轨迹跟踪和稳定性协同控制。
4、为了应对现有方法的局限性,本发明旨在充分利用无模型的深度强化学习方法,以提高控制过程中的有效性和鲁棒性。发明人尝试采用混合基于stanley的规则控制方法和基于drl的优化控制方法相结合以提高训练效率;采用同时考虑轨迹跟踪精度和横向稳定性的深度强化学习(drl)方法来提高集成控制策略的有效性和鲁棒性。
技术实现思路
1、为了解决上述现有方法的局限性,本发明提供一种电动汽车的轨迹跟踪和横向稳定性集成控制方法、装置、存储介质,旨在充分利用无模型的深度强化学习方法,以提高控制过程中的有效性和鲁棒性,采用混合基于stanley的规则控制方法和基于drl的优化控制方法相结合以提高训练效率;采用同时考虑轨迹跟踪精度和横向稳定性的深度强化学习(drl)方法来提高集成控制策略的有效性和鲁棒性,以解决分布式驱动电动汽车的轨迹跟踪和横向稳定性集成控制问题。
2、为了实现上述目的,本发明的具体方案:
3、一种电动汽车轨迹跟踪和横向稳定性的集成控制方法,包括如下步骤:
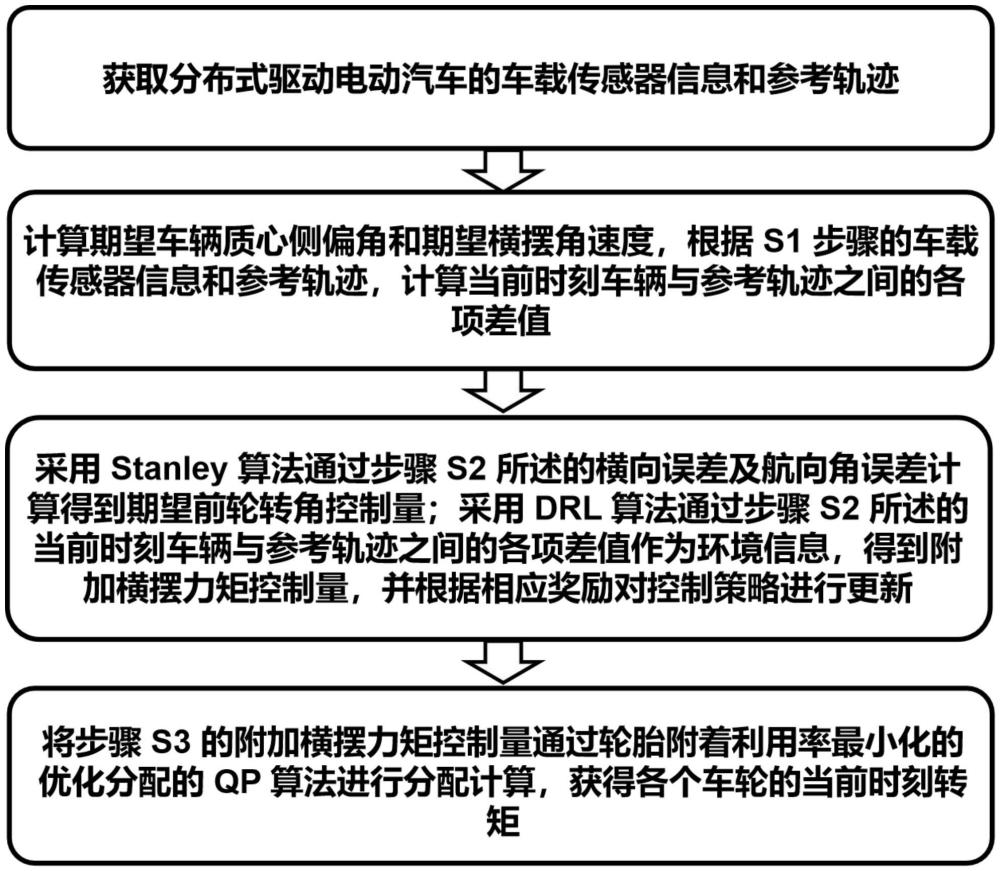
4、s1,获取分布式驱动电动汽车的车载传感器信息和参考轨迹;
5、s2,计算期望车辆质心侧偏角和期望横摆角速度,根据s1步骤的车载传感器信息和参考轨迹,计算当前时刻车辆与参考轨迹之间的横向误差、航向角误差、期望车辆质心侧偏角和实际车辆质心侧偏角之差以及期望横摆角速度和实际横摆角速度之差;
6、s3,采用stanley算法通过步骤s2所述的横向误差及航向角误差计算得到期望前轮转角控制量;采用drl算法通过步骤s2所述的当前时刻车辆与参考轨迹之间的横向误差、航向角误差、期望车辆质心侧偏角和实际车辆质心侧偏角之差以及期望横摆角速度和实际横摆角速度之差的环境信息,得到附加横摆力矩控制量,并根据相应奖励对控制策略进行更新;
7、s4,将步骤s3的附加横摆力矩控制量通过轮胎附着利用率最小化的优化分配的qp算法进行分配计算,获得各个车轮的当前时刻转矩。
8、进一步地,步骤s2所述期望车辆质心侧偏角和期望横摆角速度的计算公式如下:
9、
10、式中,vx为车辆纵向速度;γrd和βrd分别为车辆质心侧偏角和横摆角速度的期望值;k为稳定性系数;δf表示期望前轮转角控制量;m为车辆质量;lf和lr为车辆前后轴到质心位置的距离;cf和cr为车辆前轴、后轴的侧偏刚度;l为车辆前轴中心至后轴中心长度。
11、进一步地,步骤s3所述期望前轮转角控制量的计算公式如下:
12、
13、式中,δf表示期望前轮转角控制量;ey表示车辆中心和参考轨迹之间的横向距离;ψe表示车辆航向角和参考轨迹中心线之间的航向角误差;k表示stanley算法的可调超参数;v表示纵向车速。
14、进一步地,步骤s3所述附加横摆力矩控制量的计算公式如下:
15、
16、at={δmz}
17、式中,δmz表示附加横摆力矩控制量;是通过强化学习过程中的actor网络θμ′计算出当前状态st下的动作,在这即表示为附加横摆力矩控制量;ξ是加入的噪声干扰;θμ′是actor网络。
18、进一步地,步骤s3所述奖励的公式如下:
19、
20、式中,x(t)=[ey(t);ψe(t);δβ(t);δγ(t)]为车辆状态量,q为控制性能的权重矩阵;为了减少控制量的变化,将u(t)=δmz加入奖励,r为控制量的权重矩阵。
21、进一步地,将步骤s3的附加横摆力矩控制量通过轮胎附着利用率最小化的优化分配的qp算法进行分配计算的公式如下:
22、
23、式中,j表示目标函数;u=[tfl tfr trl trr]t是qp控制器的优化向量,表示四个车轮当前时刻的转矩;是优化向量的权重矩阵;ζ=diag{ζ1,ζ2}是权重矩阵,ζ1和ζ2是附加横摆力矩控制量δmz和纵向需求驱动转矩ttot的权重系数,s是附加横摆力矩控制量δmz和纵向需求驱动转矩ttot的期望值,k是增益矩阵。
24、一种电动汽车执行器容错控制装置,所述装置包括:
25、获取模块,用于获取分布式驱动电动汽车的车载传感器信息和参考轨迹;
26、跟踪模块,用于采用stanley算法通过车载传感器信息和参考轨迹进行轨迹跟踪,得到期望前轮转角控制量;
27、稳定性控制模块,用于采用drl算法通过当前时刻车辆与参考轨迹之间的横向误差、航向角误差、期望车辆质心侧偏角和实际车辆质心侧偏角之差以及期望横摆角速度和实际横摆角速度之差的环境信息进行横向稳定性控制,得到期望附加横摆力矩控制量;
28、计算模块,用于根据车载传感器信息的确定,基于轮胎附着利用率最小化的优化分配的qp算法对附加横摆力矩控制量进行计算,得到各个车轮的当前时刻驱动转矩;
29、控制模块,用于根据各个车轮当前时刻转矩控制分布式驱动电动汽车的轮毂电机输出转矩。
30、一种所述的轨迹跟踪和横向稳定性集成控制方法或所述的电动汽车执行器容错控制装置在前轮驱动转向的分布式驱动电动汽车中的应用。
31、一种计算机可读存储介质,所述存储介质中存储有指令,所述指令被处理器加载并执行以实现如所述的电动汽车轨迹跟踪和横向稳定性集成控制方法。
32、一种分布式驱动电动汽车,所述分布式驱动电动汽车包括处理器和存储器,所述存储器中存储有指令,所述指令被处理器加载并执行以实现如所述的电动汽车轨迹跟踪和横向稳定性集成控制方法。
33、本发明的优点
34、1、本发明的电动汽车轨迹跟踪和横向稳定性集成控制方法在分布式驱动电动汽车轨迹跟踪控制过程当中,通过stanley方法根据前轴中心距最近路径点的横向误差和航向角误差计算期望前轮转角控制量;同时通过drl算法根据环境信息,综合考虑轨迹跟踪精度和稳定性性能指标,得到附加横摆力矩控制量;drl算法在学习过程中,agent通过根据当前时刻的环境信息,根据当前学习到的策略得到期望前轮转角控制量,同时根据得到的奖励对策略进行更新,通过不断循环迭代以得到最优控制策略。将stanley方法这一规则控制方法和drl方法相结合,以提高drl学习过程中的学习效率。最后基于轮胎附着利用率最小化的优化分配算法对附加横摆力矩控制量进行计算,得到各个车轮的当前时刻转矩。从而使分布式驱动电动汽车在轨迹跟踪过程中具有较好的跟踪性能和横向稳定性,通过分层架构的集成控制方法有效提高控制系统的容错能力和鲁棒性。
35、2、本发明使用基于stanley方法的规则控制方法作为基准afs方法提高drl训练效率;同时考虑将轨迹跟踪精度和横向稳定性作为drl方法的状态和奖励,提高了控制器性能;并且在训练过程中将环境特征随机化,以提高控制器鲁棒性。
本文地址:https://www.jishuxx.com/zhuanli/20240905/288500.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。