一种涂胶系统和涂胶方法与流程
- 国知局
- 2024-09-05 14:54:10
本发明涉及涂胶,尤其涉及一种涂胶系统和涂胶方法。
背景技术:
1、随着汽车制造领域自动化水平的提高,普遍利用工业机器人进行涂胶工作,但在涂胶过程中,一旦出现工件位置或工件形状变化,胶枪与工件距离过近,则造成胶枪损坏事故。如此不仅造成较长时间停台,还需要较高的维修成本。
技术实现思路
1、本发明实施例提供了一种涂胶系统和涂胶方法,利用测距传感单元获取涂胶枪与涂胶工件的间距,可以根据距离偏差调节涂胶枪的移动轨迹,保证在涂胶过程中,及时调整涂胶工件和涂胶枪的间距,避免产生碰撞,保证涂胶的效果。
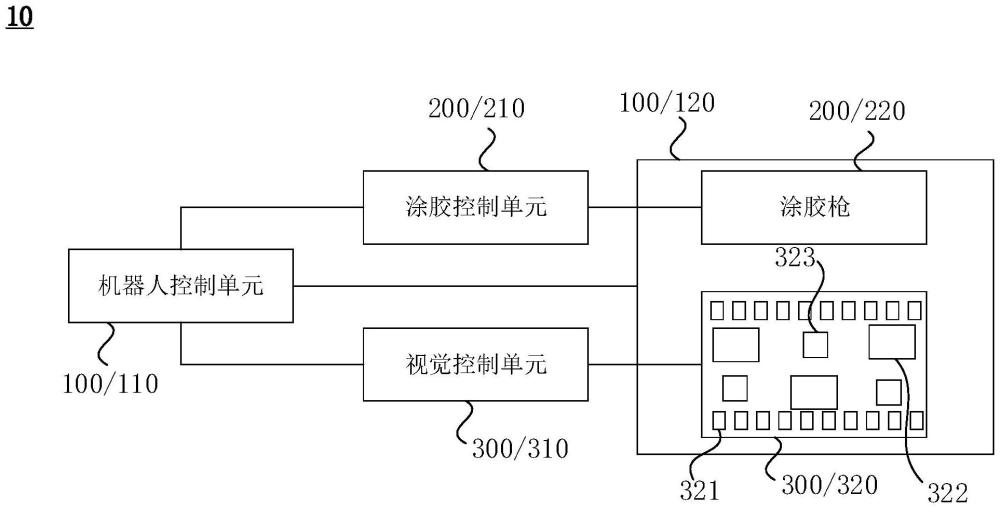
2、第一方面,本发明实施例提供一种涂胶系统,包括:机器人模块、涂胶模块和视觉模块;
3、所述机器人模块包括机器人控制单元和机器人本体,所述机器人控制单元和所述机器人本体电连接;
4、所述涂胶模块包括涂胶控制单元和涂胶枪,所述涂胶控制单元与所述涂胶枪电连接;所述涂胶枪位于所述机器人本体上;
5、所述视觉模块包括视觉控制单元和视觉传感器,所述视觉控制单元与所述视觉传感器电连接;所述视觉传感器包括多个灯珠,所述视觉传感器位于所述涂胶枪上,所述视觉传感器包括多个测距传感单元;
6、其中,所述测距传感单元获取所述涂胶枪与涂胶工件的检测距离,并将所述检测距离传输至所述视觉控制单元;所述视觉控制单元根据所述检测距离判断距离偏差,并将所述距离偏差传输至所述机器人控制单元;所述机器人控制单元根据所述距离偏差调节所述涂胶枪的移动轨迹。
7、可选的,所述视觉传感器包括至少三个测距传感单元;
8、任一所述测距传感单元与所述视觉传感器的中心距离相同。
9、可选的,所述视觉传感器还包括多个图像获取单元;所述涂胶枪包括涂胶阀;
10、所述图像获取单元获取所述涂胶枪在所述涂胶阀导通时流出胶体的图像信息,并将所述图像信息传输至所述视觉控制单元;所述视觉控制单元根据所述图像信息判断涂胶状态,并将所述涂胶状态传输至所述机器人控制单元;所述机器人控制单元根据所述涂胶状态控制所述涂胶阀导通或关断。
11、可选的,所述涂胶系统还包括光源模块,所述光源模块包括光源控制单元和至少一个测光传感单元,所述光源控制器与所述测光传感单元电连接;所述测光传感单元位于所述视觉传感器上;
12、所述测光传感单元获取所述涂胶枪的亮度信息,并将所述亮度信息传输至所述光源控制单元;所述光源控制单元根据所述亮度信息获取光源调整信息,并将所述光源调整信息传输至所述机器人控制单元;所述机器人控制单元根据所述光源调整信息输出亮度调节指令至所述视觉控制单元;所述视觉控制单元根据所述亮度调节指令调节所述灯珠的亮度。
13、可选的,所述涂胶系统还包括夹具,所述夹具用于固定所述涂胶工件。
14、第二方面,本发明实施例提供一种涂胶方法,应用于第一方面所述的涂胶系统,所述涂胶系统包括机器人模块、涂胶模块和视觉模块;所述机器人模块包括机器人控制单元和机器人本体,所述机器人控制单元和所述机器人本体电连接;所述涂胶模块包括涂胶控制单元和涂胶枪,所述涂胶控制单元与所述涂胶枪电连接;所述涂胶枪位于所述机器人本体上;所述视觉模块包括视觉控制单元和视觉传感器,所述视觉控制单元与所述视觉传感器电连接;所述视觉传感器包括多个灯珠,所述视觉传感器位于所述涂胶枪上,所述视觉传感器包括多个测距传感单元,所述涂胶方法包括:
15、控制所述测距传感器获取所述涂胶枪与涂胶工件的检测距离并将所述检测距离传输至所述视觉控制单元;
16、控制所述视觉控制单元根据所述检测距离判断距离偏差;
17、获取所述距离偏差并根据所述距离偏差调节所述涂胶枪的移动轨迹。
18、可选的,所述视觉传感器还包括多个图像获取单元;所述涂胶枪包括涂胶阀;
19、根据所述距离偏差调节所述涂胶枪的移动轨迹之后,还包括:
20、控制所述图像获取单元获取所述涂胶枪在所述涂胶阀导通时流出胶体的图像信息并将所述图像信息传输至所述视觉控制单元;
21、控制所述视觉控制单元根据所述图像信息判断涂胶状态;
22、获取所述涂胶状态并根据所述涂胶状态控制所述涂胶阀导通或关断。
23、可选的,控制所述图像获取单元获取所述涂胶枪在所述涂胶阀导通时流出胶体的图像信息,并将所述图像信息传输至所述视觉控制单元包括:
24、控制所述图像获取单元在示教位置点获取所述涂胶枪的胶体图像信息,在所述涂胶枪的移动轨迹上包括多个所述示教位置点;
25、控制所述视觉控制单元根据所述图像信息判断涂胶状态包括:
26、控制所述视觉控制单元根据多个所述当前图像信息判断所述示教位置点的所述涂胶状态;
27、若所述胶体图像信息中胶体长度ln小于l时,其中,l为第一预设值;
28、则判断在所述示教位置点上,所述涂胶状态为断胶状态;
29、否则判断在所述示教位置点上,所述涂胶状态为非断胶状态;
30、获取所述涂胶状态并根据所述涂胶状态控制所述涂胶阀导通或关断包括:
31、若所述涂胶状态为断胶状态,控制所述涂胶阀导通并对所述示教位置点补胶;
32、若所述涂胶状态为非断胶状态,控制所述涂胶阀关断。
33、可选的,所述视觉传感器还包括多个图像获取单元;所述涂胶枪包括涂胶阀;
34、控制所述测距传感器获取所述涂胶枪与涂胶工件的检测距离并将所述检测距离传输至所述视觉控制单元之前,还包括:
35、控制所述图像获取单元获取所述涂胶枪的涂胶枪图像信息并将所述涂胶枪图像信息传输至所述视觉控制单元;
36、控制所述视觉控制单元根据所述涂胶枪图像信息判断所述涂胶枪的枪头状态;其中,所述涂胶枪图像信息与基准图像之间偏置值为k1,若k1>k时,k为第二预设值;
37、则判断所述涂胶枪为工作状态;
38、否则判断所述涂胶枪为报警状态。
39、可选的,所述涂胶系统还包括光源模块,所述光源模块包括光源控制单元和至少一个测光单元,所述光源控制器与所述测光单元电连接;所述测光单元位于所述视觉传感器上;
40、根据所述距离偏差调节所述涂胶枪的移动轨迹还包括:
41、控制所述测光单元获取所述涂胶枪的亮度信息并将所述亮度信息传输至所述光源控制单元;
42、控制所述光源控制单元根据所述亮度信息获取光源调整信息;
43、获取所述光源调整信息并根据所述光源调整信息输出亮度调节指令至所述视觉控制单元;并控制所述视觉控制单元根据所述亮度调节指令调节所述灯珠的亮度
44、本发明实施例提供一种涂胶系统,涂胶系统中测距传感单元获取涂胶枪与涂胶工件的检测距离,并将检测距离传输至视觉控制单元;视觉控制单元根据检测距离判断距离偏差,并将距离偏差传输至机器人控制单元;机器人控制单元根据距离偏差调节涂胶枪的移动轨迹。采用本发明实施例提供的技术方案,可以在涂胶过程中,及时的调整涂胶工件和涂胶枪的间距,避免产生碰撞,保证涂胶的效果。
本文地址:https://www.jishuxx.com/zhuanli/20240905/288751.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表