借助入口阀与制动回路/车轮制动器的特殊布线调节压力形成的制动装置和压力调节方法与流程
- 国知局
- 2024-09-05 14:56:39
本发明涉及一种用于车辆制动装置的操纵设备。
背景技术:
1、从1978年abs大量引入开始,在abs调节期间,在压力释放(pab)之后,压力阶梯式地经由入口阀(ev)形成(pauf)。不久前,对入口阀(ev)进行pwm控制(脉宽调制)用于更准确的压力控制。压力形成(pauf)经由入口阀(ev)时间控制,压力幅值是阀打开的时间控制的和另外的参数,如阀上的压差、阀压力和温度的函数。阶梯式的压力形成(pauf)也由于压力波动产生噪声。
2、为了改进压力幅值的精度和噪声,在申请人的专利申请de 10 2005055 751和de10 2009 008 944中提出一种所谓的多路方法(mux)。将此理解成调节和控制方法,其中与压力源(如活塞,双冲程活塞,差动活塞,泵)连接的执行器,尤其车轮制动器加载压力,其中借助于压力源的容积的控制和测量控制执行器中的压力形成和压力释放。尤其地,用于压力形成(pauf)和压力释放(pab)的压力幅值通过活塞系统的容积测量进行,其中压力振幅从轮缸的p-v特性曲线(压力-容积特性曲线)中推导出。所述方法是精确的且低噪声的。
3、de 10 2013 203 594 a1公开一种经由活塞连同传统的入口阀和与其并联的止回阀进行容积控制的方法。在调节期间在轮缸中的受控的abs压力的压差下,控制压力必须始终大于车轮制动器中的最大压力。压差尤其能够在μ-split(不同摩擦系数)时是非常高的。从de 10 2013 203594a1中已知的方法要求了解轮缸中的当前的压力关系,以便容积不会无意地从轮缸中经由与配属于轮缸的入口阀并联连接的止回阀流出。如果仅估计压力关系,那么出现在压力方面±15bar的误差。因为为了控制将压力值进行比较,此外,在比较时能够出现压力误差,所述压力误差是双倍大的:±30bar。因为在所述方法中必须确保预压力不低于轮缸中的压力,因此保持控制压力至少高于轮缸的估计的压力60bar。在阀的pwm控制中,阀的关闭压力受到分散,所述分散例如取决于阀的线圈温度。由此,控制压力必须再次继续升高。通过从de 10 2013 203594a1中已知的方法可靠地起作用,控制压力必须位于高于车轮制动器中的最高压力100bar的范围中。在压力形成时,阀形成穿流阻力,由此控制压力继续升高。所述必要的高的控制压力使制动装置和阀大量负荷,并且不利地不能够使用具有大的横截面的阀。
4、入口阀(ev)在制动系统中示出节流阻力,所述节流阻力示出在压力形成速度高时值得注意的背压,所述背压在制动增力装置(bkv)失效时在失效恢复中通过制动路径延长可觉察到。在集成的abs中,背压使得用于产生压力的马达以大约10%负荷。
技术实现思路
1、本发明基于如下目的,继续改进这种操纵设备,由此尤其能够更准确地控制压力形成pauf,在此不必强制性地使用pwm方法,并且阀不必针对大的横截面,即小的穿流阻力设计,并且不必针对在压差高时的可靠的切换能力设计。因为阀的压差稳定性此外确定阀的成本,借助该方法应实现成本降低。此外,应降低在压力形成pauf时的噪声。
2、根据本发明该目的借助根据本发明的操纵设备来实现。
3、在新的方法中,在pauf时,控制压力pvor在与实际压力水平的压差相对小,例如大约10bar至20bar时,针对相应的车轮制动器单独设定,所述实际压力水平基本上取决于车道的摩擦系数。在此对于全部实际压力水平遵循例如大约为10bar至20bar的小的压差。只要必须为至少两个车轮制动器提高车轮压力并且为此确定不同的期望压力,那么随后要借助于压力源设定的最大的控制预压力pvor称作为最大压力pvor,max。所述最大压力pvor,max能够小于包含在车轮制动器中的实际压力,只要在该车轮制动器中制动压力不必须改变。基于车轮制动压力能够借助于容积控制δv和/或借助于时间控制δt在不同的车轮制动器中设定的可能性,关于制动装置的动力得出明显的优点。因此,借助于预设的控制压力pvor,所述控制压力比例如要在两个车轮制动器中设定的期望压力高例如10bar至20bar,该车轮制动器中的压力能够同时地、时间重叠地或时间依次地调节或设定。因此,例如通过配属于相应的车轮制动器的切换阀的时间预定的打开,期望压力提升至所要求的期望压力。在此,将随时间打开理解成在预定的时间段δt内打开一次。在时间段δt结束之后,相应的阀关闭。根据本发明的随时间打开因此明显不同于pwm方法。
4、也得出流量的小的波动。此外,与在根据现有技术的abs压力调节中相比,得出在阀上的明显更小的压差,在现有技术中的abs压力调节中,对于全部车轮制动器同时起作用的控制预压力pvor能够达到非常高的值,例如直至200bar,并且所述控制预压力从踏板操纵中得出。因此,在阀横截面的流动横截面相同的情况下,与在从现有技术中已知的abs调节方法中相比,在根据本发明的方法中的abs运行时阀的必要的打开力更小。因此,在根据本发明的方法中,用于关闭阀的电流与在已知的abs调节方法中相比能够限制于更小的数值。当然,也可行的是,在阀电流相同的情况下,与在已知的abs调节方法中相比,在根据本发明的方法中的阀横截面能够以更大的流动横截面设计。此外,通过阀的时间控制,在关闭时在压差小时,与在压差大时相比出现更小的液压波动进而更少的噪声。在新方法中在压力源,例如活塞上的压力变化由于较小的压差同样小于在标准abs的情况下。在接近压力形成pauf结束时通过阀的容积流随时间降低的情况下,在关闭阀时的压力波动最小,使得仅阀的关闭噪声仍为噪声源。所述噪声能够进一步地通过借助阀的相应的电压或电流控制来缓慢地降低磁力而明显降低。
5、借助根据本发明的解决方案或其有利的实施方式,基于令人惊讶地简单的方式实现,能够非常准确地控制制动设备中的压力形成,其中尤其也能够将制动设备的入口阀上的背压保得小。
6、本发明的有利的实施方式从在此参考的其他的权利要求中得出,其中这些权利要求能够有利地通过在附图中示出的具体的实施例的其他特征或特征组合补充。
技术特征:1.一种用于车辆制动装置的操纵设备,所述操纵设备具有:
2.根据权利要求1所述的操纵设备,
3.根据权利要求1所述的操纵设备,
4.根据权利要求1所述的操纵设备,
5.根据权利要求1所述的操纵设备,
6.根据权利要求5所述的操纵设备,
7.根据权利要求5所述的操纵设备,
8.根据权利要求1所述的操纵设备,
9.根据权利要求3所述的操纵设备,
10.根据权利要求1所述的操纵设备,
11.根据权利要求1所述的操纵设备,
12.根据权利要求1所述的操纵设备,
13.根据权利要求1所述的操纵设备,
14.根据权利要求1所述的操纵设备,
15.根据权利要求1所述的操纵设备,
16.根据权利要求1所述的操纵设备,
17.根据权利要求1所述的操纵设备,
18.根据权利要求1所述的操纵设备,
19.根据权利要求1所述的操纵设备,
20.一种用于运行根据权利要求1所述的操纵设备的方法,所述方法包括:在调节运行中的实际车轮制动压力下,将所述压力源的控制预压力保持在小于或等于150bar的水平。
21.根据权利要求20所述的方法,
22.根据权利要求20所述的方法,所述方法还包括:通过所述压力源的压力产生单元的活塞的前进冲程或返回冲程,在考虑用于不同的车轮制动器的压力-容积特性曲线的情况下,动态地调整控制预压力,以及在车轮制动器的压力形成之前,将相对于所述车轮制动器的实际压力的压差设定成小于或等于40bar。
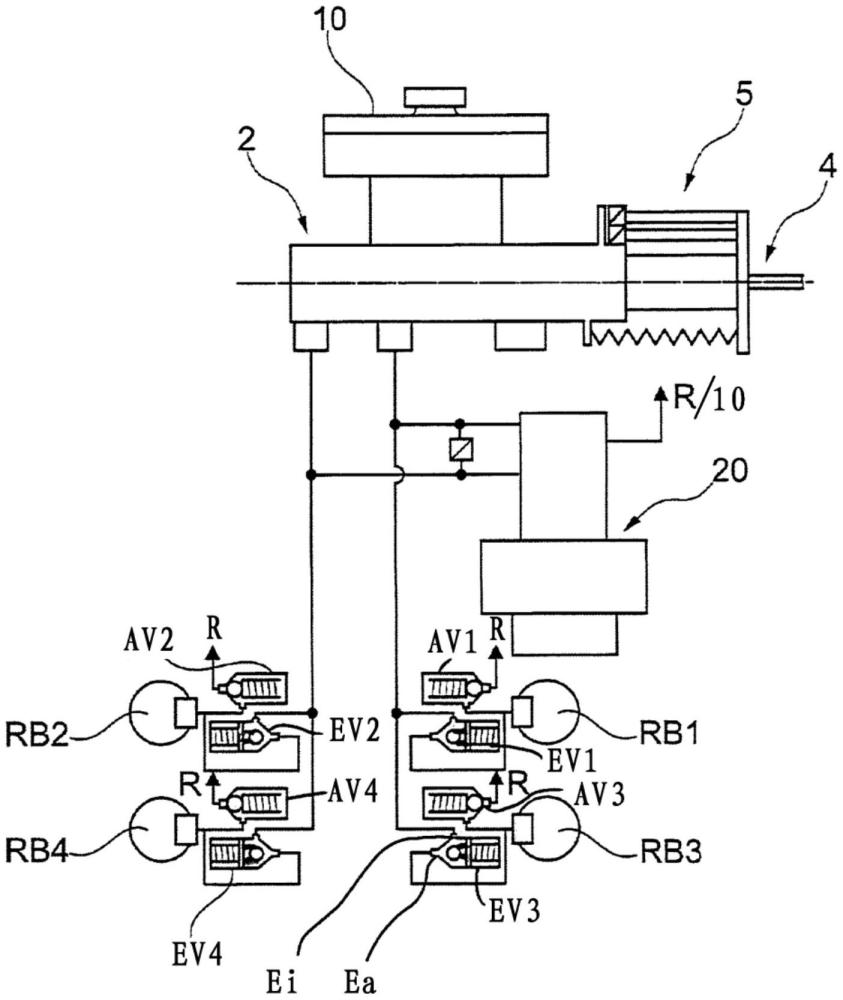
技术总结本发明涉及一种操纵设备,尤其用于车辆制动装置,所述操纵设备具有:控制装置和第一活塞缸单元(2),所述第一活塞缸单元的至少一个工作腔经由至少一个液压管路和至少具有常开的入口阀或切换阀(EV)的阀装置与至少一个执行器,尤其车轮制动器(RB1,RB2,RB3,RB4)连接;可控制或可调节的压力源(20,DV),以便向至少一个液压管路或与之连接的执行器或车轮制动器输送压力介质,其特征在于,控制装置借助于入口阀(EV)经由容积控制(ΔV)和/时间控制(Δt)对压力形成进行调节,并且入口阀(EV)的内腔或衔铁腔经由液压管路与相关的制动回路(BK)连接,并且阀座输出端(Ea)经由液压管路与相关的车轮制动器(RB)连接。技术研发人员:海因茨·莱贝尔,托马斯·莱贝尔,安东·万赞滕受保护的技术使用者:爱皮加特股份公司技术研发日:技术公布日:2024/9/2本文地址:https://www.jishuxx.com/zhuanli/20240905/288938.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。