一种系留无人机的电源系统
- 国知局
- 2024-09-05 15:00:55
本发明涉及系留无人机电源,尤其涉及一种系留无人机的电源系统。
背景技术:
1、系留无人机是一种通过电缆或绳索与地面连接的无人机系统,它能够在空中悬停或进行有限范围的移动,同时从地面获取电力和数据传输。这种独特的设计使得系留无人机能够实现几乎无限时间的飞行,不受电池续航能力的限制,特别适合执行需要长时间持续监视或特定区域覆盖的任务。
2、系留无人机的电缆不仅提供稳定的能源供应,支持无人机搭载更多或更高功率的设备,如高清摄像头、通信中继器或专业传感器,而且还作为数据传输通道,确保高速、稳定的数据通信,适用于实时视频传输和控制信号。此外,系留无人机在空中的稳定性较好,操作简便,安全性高,减少了与空中其他物体的碰撞风险。
3、在实际应用中,系留无人机可用于多种场景,包括安全监控、边境巡逻、大型活动安保、通信中继、搜索救援、广告媒体、科研环境监测、军事国防以及基础设施检查等。例如,在灾害响应和搜索救援任务中,系留无人机可以提供实时的图像和数据,帮助救援团队更好地了解情况;在移动通信领域,它可以用作通信中继站,提供临时的网络覆盖或增强现有网络。
4、尽管系留无人机具有许多优势,但它们也存在一些局限性,如飞行范围受限于电缆长度,尤其是当该系留无人机应用于在大面积的应用区域中,通过系留无人机进行状况监测之时,由于应用区域的面积大且在对状况进行监测的过程中无法在短时间内结束工作,因此导致目前的系留无人机在实际应用的过程中,仅能够做到以系留电源为圆心对局部的应用区域进行监测,无法进一步扩大,此外即便是能够做到系留无人机对应用区域监测范围的进一步扩大,在符合该前置要求的同时,被监测的应用区域所在空中位置对系留无人机所带来的影响也无法根据现有的电源管理系统来进行管控,继而或将导致系留电源在针对该环境和该情况进行输出时,出现能源高强度输出,继而缩短系留无人机实际可运行时间的问题。
5、故而提出一种系留无人机的电源系统用以解决或缓解上述问题。
技术实现思路
1、本发明的目的是为了解决现有技术中存在的缺点,而提出的一种系留无人机的电源系统。
2、为了实现上述目的,本发明采用了如下技术方案:
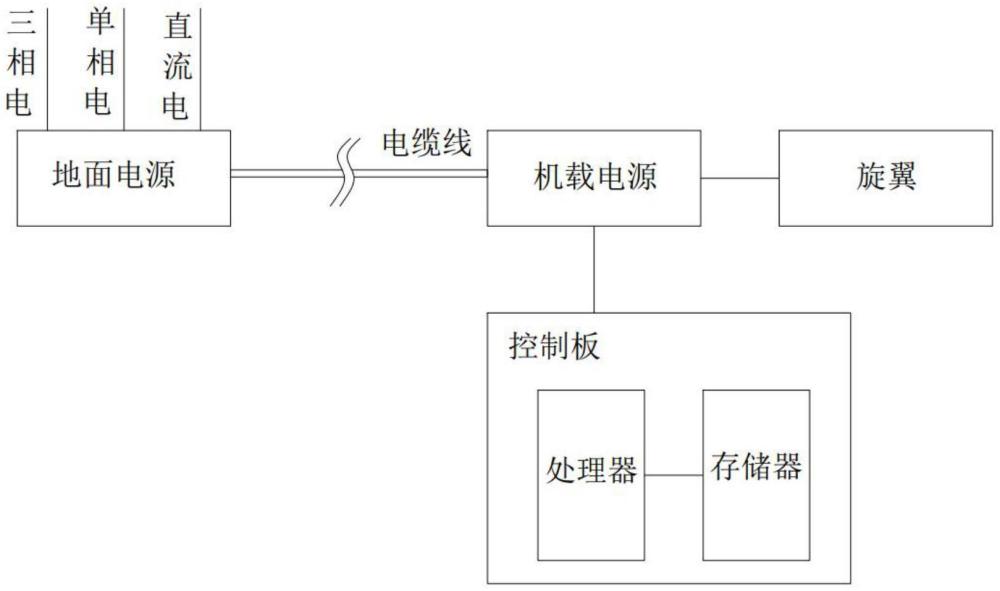
3、一种系留无人机的电源系统,包括地面电源、机载电源、控制板;
4、所述机载电源,其设置于无人机内,且用于对无人机内旋翼供电;
5、所述控制板包括处理器和存储器,所述处理器与存储器耦接,所述存储器内设置有电源负载协同模拟模型,所述电源负载协同模拟模型拟定无人机于应用地域上空50-500m飞行的模拟消耗功率,所述处理器的输入端与机载电源的输出端耦接,所述机载电源反馈实际消耗功率并对比模拟消耗功率以校准电源负载协同模拟模型;
6、所述地面电源于水平方向上可位移设置,所述地面电源的水平位移速度与无人机的水平位移速度相同,且所述地面电源用以承接多种规格电能,所述地面电源通过机载电源与处理器耦接,所述地面电源接收模拟消耗功率以调节地面电源输出电压。
7、优选地,所述电源负载协同模拟模型以拟定无人机于应用区域上空50-500m飞行的模拟消耗功率的方法,包括如下步骤:
8、提取无人机的环境特征和飞行特征,所述无人机的环境特征包括气压、湿度、气温、湍流强度,所述无人机的飞行特征包括飞行高度、飞行速度、飞行方向与风向之间夹角;
9、提取无人机的自身规格特征,所述无人机的自身规格特征包括迎风面积、阻力系数变化图谱、无人机自重;
10、提取地面电源的环境特征,所述地面电源的环境特征包括参考高度风速、参考高度、位移速度、地面粗糙度;
11、将无人机的飞行特征、以及地面电源的环境特征导入至相对流速公式后,导出相对空气流速;
12、将相对空气流速与无人机的环境特征导入模拟消耗公式,导出模拟消耗功率。
13、优选地,所述相对流速公式包括其中,θ为飞行方向与风向之间夹角,h为飞行高度,z为地面粗糙度,vref为参考高度风速,href为参考高度,vrel为相对空气流速,vdrone为飞行速度。
14、优选地,所述模拟消耗公式包括其中,△p为模拟消耗功率,vdrone为飞行速度,m为无人机自重,g为重力加速度,rh为湿度,exp为指数函数,常数6.112*10-3是水的饱和蒸汽在0℃时的值,tk为开尔文气温温度,tc为气温,p为气压,r为湿空气的通用气体常数,对于湿空气,可以使用r=rd+w,其中rd是干空气的气体常数(约287j/(kg·k)),w是水蒸气的质量比热容比,对于标准条件,w约为0.622,a为迎风面积,cd为阻力系数变化图谱。
15、优选地,所述地面电源接收模拟消耗功率以调节地面电源输出电压的方法,包括如下步骤:
16、提取模拟消耗功率、电缆线电阻、机载电源输出电流、以及转换效率,所述转换效率为机载电源的输入功率与输出功率的比值;
17、将模拟消耗功率、电缆线电阻、机载电源输出电流、转换效率导入至输出电压推算公式后,导出地面电源输出电压。
18、优选地,所述电压推算公式包括其中,△p为模拟消耗功率,i为机载电源输出电流,η为转换效率,rcable为电缆线电阻,voutput为地面电源输出电压。
19、优选地,还包括气压传感器、温湿度传感器、湍流传感器、风速风向传感器和无人机,所述气压传感器、温湿度传感器、湍流传感器、和风速风向传感器均设置于无人机上,且所述气压传感器、温湿度传感器、湍流传感器、和风速风向传感器均与处理器耦接。
20、优选地,还包括风速传感器、载具、测速传感器,所述地面电源和测速传感器设置于载具上,所述风速传感器设置于载具上方,所述测速传感器、风速传感器的输出端均与地面电源耦接,且所述载具与无人机保持相对静止。
21、优选地,所述电缆线为系留电缆。
22、优选地,所述地面电源包括输出电压宽范围可调节的编程电源,地面电源自适应3种输入规格,其中交流优先。
23、本发明具有以下有益效果:
24、本发明能够通过将地面电源设置在载具上,令本无人机飞行的圆心可以在地面上发生水平位移,继而使得本无人机的飞行监测范围得以覆盖整个大面积应用区域,并且在本无人机于应用区域高空进行飞行监测过程中,得以获取无人机飞行特征、无人机环境特征、无人机自身特征、地面电源环境特征来利用电源负载协同模拟模型模拟出无人机跟随水平位移的载具进行位移的过程中,估算出其或遭遇到的模拟消耗功率,以传递回地面电源来调节其输出电压,继而使得本电源系统能够对系留无人机与应用区域环境中、且对大面积应用区域进行全覆盖的前提下控制其消耗能源,延长该系留无人机的工作时间。
技术特征:1.一种系留无人机的电源系统,包括地面电源、机载电源、控制板;
2.根据权利要求1所述的一种系留无人机的电源系统,其特征在于,所述电源负载协同模拟模型以拟定无人机于应用地域上空50-500m飞行的模拟消耗功率的方法,包括如下步骤:
3.根据权利要求2所述的一种系留无人机的电源系统,其特征在于,所述相对流速公式包括其中,θ为飞行方向与风向之间夹角,h为飞行高度,z为地面粗糙度,vref为参考高度风速,href为参考高度,vrel为相对空气流速,vdrone为飞行速度。
4.根据权利要求3所述的一种系留无人机的电源系统,其特征在于,所述模拟消耗公式包括其中,△p为模拟消耗功率,vdrone为飞行速度,m为无人机自重,g为重力加速度,rh为湿度,exp为指数函数,常数6.112*10-3是水的饱和蒸汽在0℃时的值,tk为开尔文气温温度,tc为气温,p为气压,r为湿空气的通用气体常数,对于湿空气,可以使用r=rd+w,其中rd是干空气的气体常数(约287j/(kg·k)),w是水蒸气的质量比热容比,对于标准条件,w约为0.622,a为迎风面积,cd为阻力系数变化图谱。
5.根据权利要求4所述的一种系留无人机的电源系统,其特征在于,所述地面电源接收模拟消耗功率以调节地面电源输出电压的方法,包括如下步骤:
6.根据权利要求5所述的一种系留无人机的电源系统,其特征在于,所述电压推算公式包括其中,△p为模拟消耗功率,i为机载电源输出电流,η为转换效率,rcable为电缆线电阻,voutput为地面电源输出电压。
7.根据权利要求1所述的一种系留无人机的电源系统,其特征在于,还包括气压传感器、温湿度传感器、湍流传感器、风速风向传感器和无人机,所述气压传感器、温湿度传感器、湍流传感器、和风速风向传感器均设置于无人机上,且所述气压传感器、温湿度传感器、湍流传感器、和风速风向传感器均与处理器耦接。
8.根据权利要求7所述的一种系留无人机的电源系统,其特征在于,还包括风速传感器、载具、测速传感器,所述地面电源和测速传感器设置于载具上,所述风速传感器设置于载具上方,所述测速传感器、风速传感器的输出端均与地面电源耦接,且所述载具与无人机保持相对静止。
9.根据权利要求1所述的一种系留无人机的电源系统,其特征在于,所述电缆线为系留电缆。
10.根据权利要求1所述的一种系留无人机的电源系统,其特征在于,所述地面电源包括输出电压宽范围可调节的编程电源,地面电源自适应3种输入规格,其中交流优先。
技术总结本发明公开了一种系留无人机的电源系统,属于系留无人机电源技术领域,解决了系留电源在针对该环境和该情况进行输出时,出现能源高强度输出,继而缩短系留无人机实际可运行时间的问题。包括地面电源、机载电源、控制板;机载电源,其设置于无人机内,且用于对无人机内旋翼供电;控制板包括处理器和存储器,处理器与存储器耦接,存储器内设置有电源负载协同模拟模型,电源负载协同模拟模型拟定无人机于应用地域上空50‑500m飞行的模拟消耗功率。本发明通过车载地面电源使无人机圆心在地面水平移动,扩大监测范围至整片无人机应用地域,飞行中收集无人机和环境特征,模拟估算能耗,调节电源输出,优化能源消耗,延长系留无人机工作时间。技术研发人员:汪邦照,施长海,董天天,徐鹤,常永培受保护的技术使用者:江苏信息职业技术学院技术研发日:技术公布日:2024/9/2本文地址:https://www.jishuxx.com/zhuanli/20240905/289024.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表