高速公路改扩建施工期交通状态空地协同感知方法及系统与流程
- 国知局
- 2024-09-11 14:56:13
本发明涉及道路交通领域,具体涉及一种高速公路改扩建施工期交通状态空地协同感知方法及系统。
背景技术:
1、高速公路改扩建项目均为交通繁忙道路,沿线经济发达、路网密集、居民众多,边施工边运行使得路网拥堵进一步加剧、影响城市环境,造成社会公众出行体验急剧下降。因此,需要对交通状态进行实时感知,为相应的交通管控决策提供支持。
2、然而,尽管高速公路已有的路侧视频监控对高速公路实现了全覆盖,但在改扩建施工期间,部分监控会临时被移除或出现通讯供电等故障,因此需要其他感知手段对路侧监控进行临时补盲,但目前并没有有效的临时补盲技术手段。
3、因此,需要一种高速公路改扩建施工期交通状态空地协同感知方法及系统,能够实现高速公路改扩建施工期交通状态全域感知,为高速公路在改扩建施工期交通管控决策提供了技术支持。
技术实现思路
1、有鉴于此,本发明的目的是克服现有技术中的缺陷,提供高速公路改扩建施工期交通状态空地协同感知方法及系统,能够实现高速公路改扩建施工期交通状态全域感知,为高速公路在改扩建施工期交通管控决策提供了技术支持。
2、本发明的高速公路改扩建施工期交通状态空地协同感知方法,包括:
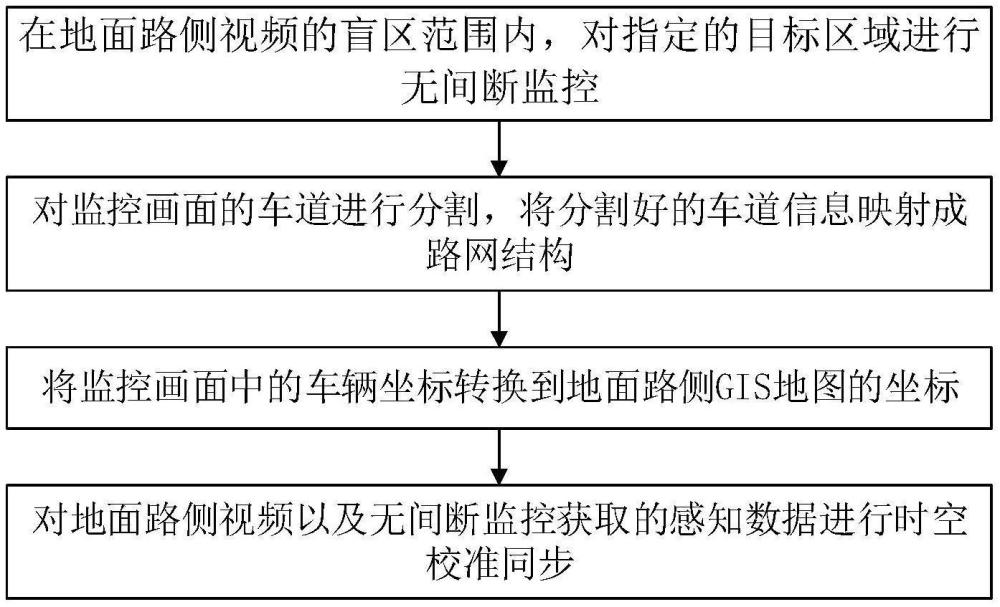
3、在地面路侧视频的盲区范围内,对指定的目标区域进行无间断监控;
4、对监控画面的车道进行分割,将分割好的车道信息映射成路网结构;
5、将监控画面中的车辆坐标转换到地面路侧gis地图的坐标;
6、对地面路侧视频以及无间断监控获取的感知数据进行时空校准同步。
7、进一步,在地面路侧视频的盲区范围内,对指定的目标区域进行无间断监控,具体包括:
8、构建无人机队列以及为无人机进行充电的充电站队列;
9、根据无人机的续航时间设定调度周期,在每个调度周期开始时,检查无人机队列中所有无人机的状态,如果有无人机处于起飞状态,则检查其电量,如果电量低于设定阈值,则将其返回充电站队列的队尾指定充电站,将需要充电的无人机指派至该充电站进行充电;同时,选择充电站队列中队头的无人机升空,确保至少有1台无人机指定的目标区域进行监控,并更新无人机队列中的无人机状态和电量信息;其中,无人机队列循环轮转,确保每个无人机都有机会充电和升空监控;
10、确保每台升空的无人机飞行到指定的经纬度位置稳定悬停进行监控。
11、进一步,对监控画面的车道进行分割,将分割好的车道信息映射成路网结构,具体包括:
12、构建车道分割模型;所述车道分割模型包括编码单元以及解码单元;
13、所述编码单元包括:
14、初始卷积层,使用3x3的卷积核对输入图像进行初步特征提取,结合batchnormalization和prelu激活函数;
15、初始编码器块,包括两个regular convolution层,每层后接batchnormalization和prelu激活函数,最后使用max pooling进行下采样;
16、更多编码器块,每个编码器块包含多个卷积层,通过叠加更多的编码器块,以逐渐提取图像的抽象特征;
17、所述解码单元包括:
18、初始解码器块,通过upsampling操作,将特征图的分辨率还原,接着regularconvolution层,结合batch normalization和prelu激活函数;
19、更多解码器块,每个解码器块块进行upsampling操作并包括卷积层;
20、最终解码器块,进行upsampling操作并包括卷积层,将特征图的分辨率还原到原始输入图像的大小;
21、利用车道分割模型分割出监控画面中的车道信息;所述车道信息包括车道线信息、车道连接信息以及路面标志信息;
22、基于车道线的几何信息,使用拼接算法将相邻的车道线进行连接,形成连续的车道;通过车道线的宽度信息,估计车道的实际宽度;
23、使用车道线的交点与夹角信息检测路口的位置和形状,从而确定各个路口情况;根据车道连接信息,确定道路的连接关系,并为每个路段分配唯一的标识符;其中,所述路段为由一个路口到另一个路口之间的道路段落。
24、进一步,将监控画面中的车辆坐标转换到地面路侧gis地图的坐标,具体包括:
25、假设无人机监控画面中的车辆位置为图像坐标(x,y),而gis地理坐标为(lat,lon);则图像坐标转换为gis地理坐标的计算方式为:
26、
27、其中,(xorigin,yorigin)是图像原点的坐标,(latorigin,lonorigin)是gis地图原点坐标,pixels_per_degreelat和pixels_per_degreelon分别是每个纬度与每个经度的像素数。
28、进一步,对地面路侧视频以及无间断监控获取的感知数据进行时空校准同步,具体包括:
29、在高速公路扩建施工期交通环境下分别采用现场标定后的深度学习目标检测算法与点云目标聚类检测算法识别车辆位态,将地面路侧视频以及所述感知数据转化为目标级结构化数据;其中,所述感知数据包括无人机鸟瞰视频和无人机鸟瞰激光雷达数据;
30、建立基于kriging算法的数据时空同步模型,设计全局时空距离最小目标函数,并应用序列二次规划法对数据时空同步模型进行参数求解,确保地面路侧视频以及感知数据在时空上的一致性。
31、一种高速公路改扩建施工期交通状态空地协同感知系统,包括盲区监控单元、路网结构单元、坐标转换单元以及时空同步单元;
32、所述盲区监控单元,用于在地面路侧视频的盲区范围内,对指定的目标区域进行无间断监控;
33、所述路网结构单元,用于对监控画面的车道进行分割,将分割好的车道信息映射成路网结构;
34、所述坐标转换单元,用于将监控画面中的车辆坐标转换到地面路侧gis地图的坐标;
35、所述时空同步单元,用于对地面路侧视频以及无间断监控获取的感知数据进行时空校准同步。
36、进一步,在地面路侧视频的盲区范围内,对指定的目标区域进行无间断监控,具体包括:
37、构建无人机队列以及为无人机进行充电的充电站队列;
38、根据无人机的续航时间设定调度周期,在每个调度周期开始时,检查无人机队列中所有无人机的状态,如果有无人机处于起飞状态,则检查其电量,如果电量低于设定阈值,则将其返回充电站队列的队尾指定充电站,将需要充电的无人机指派至该充电站进行充电;同时,选择充电站队列中队头的无人机升空,确保至少有1台无人机指定的目标区域进行监控,并更新无人机队列中的无人机状态和电量信息;其中,无人机队列循环轮转,确保每个无人机都有机会充电和升空监控;
39、确保每台升空的无人机飞行到指定的经纬度位置稳定悬停进行监控。
40、进一步,对监控画面的车道进行分割,将分割好的车道信息映射成路网结构,具体包括:
41、构建车道分割模型;所述车道分割模型包括编码单元以及解码单元;
42、所述编码单元包括:
43、初始卷积层,使用3x3的卷积核对输入图像进行初步特征提取,结合batchnormalization和prelu激活函数;
44、初始编码器块,包括两个regular convolution层,每层后接batchnormalization和prelu激活函数,最后使用max pooling进行下采样;
45、更多编码器块,每个编码器块包含多个卷积层,通过叠加更多的编码器块,以逐渐提取图像的抽象特征;
46、所述解码单元包括:
47、初始解码器块,通过upsampling操作,将特征图的分辨率还原,接着regularconvolution层,结合batch normalization和prelu激活函数;
48、更多解码器块,每个解码器块块进行upsampling操作并包括卷积层;
49、最终解码器块,进行upsampling操作并包括卷积层,将特征图的分辨率还原到原始输入图像的大小;
50、利用车道分割模型分割出监控画面中的车道信息;所述车道信息包括车道线信息、车道连接信息以及路面标志信息;
51、基于车道线的几何信息,使用拼接算法将相邻的车道线进行连接,形成连续的车道;通过车道线的宽度信息,估计车道的实际宽度;
52、使用车道线的交点与夹角信息检测路口的位置和形状,从而确定各个路口情况;根据车道连接信息,确定道路的连接关系,并为每个路段分配唯一的标识符;其中,所述路段为由一个路口到另一个路口之间的道路段落。
53、进一步,将监控画面中的车辆坐标转换到地面路侧gis地图的坐标,具体包括:
54、假设无人机监控画面中的车辆位置为图像坐标(x,y),而gis地理坐标为(lat,lon);则图像坐标转换为gis地理坐标的计算方式为:
55、
56、其中,(xorigin,yorigin)是图像原点的坐标,(latorigin,lonorigin)是gis地图原点坐标,pixels_per_degreelat和pixels_per_degreelon分别是每个纬度与每个经度的像素数。
57、进一步,对地面路侧视频以及无间断监控获取的感知数据进行时空校准同步,具体包括:
58、在高速公路扩建施工期交通环境下分别采用现场标定后的深度学习目标检测算法与点云目标聚类检测算法识别车辆位态,将地面路侧视频以及所述感知数据转化为目标级结构化数据;其中,所述感知数据包括无人机鸟瞰视频和无人机鸟瞰激光雷达数据;
59、建立基于kriging算法的数据时空同步模型,设计全局时空距离最小目标函数,并应用序列二次规划法对数据时空同步模型进行参数求解,确保地面路侧视频以及感知数据在时空上的一致性。
60、本发明的有益效果是:本发明公开的一种高速公路改扩建施工期交通状态空地协同感知方法及系统,通过无人机搭载鸟瞰视频和鸟瞰毫米波雷达对地面路侧监控视频的临时盲区进行补盲,并建立面向无间断监控的无人机群调度方法,进行“空-地”感知数据路网结构映射匹配,“空-地”“雷-视”多模态感知数据时空同步和融合,实现了高速公路改扩建施工期交通状态全域感知,从而为高速公路在改扩建施工期的交通管控决策提供支持。
本文地址:https://www.jishuxx.com/zhuanli/20240911/292631.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。