一种管道连接纠偏巡检机器人的制作方法
- 国知局
- 2024-09-11 15:07:52
本发明涉及管道连接,特别涉及一种管道连接纠偏巡检机器人。
背景技术:
1、管道是用管子、管子连接件和阀门等连接成的用于输送气体、液体或带固体颗粒的流体的装置。通常,流体经鼓风机、压缩机、泵和锅炉等增压后,从管道的高压处流向低压处,也可利用流体自身的压力或重力输送。管道的用途很广泛,主要用在给水、排水、供热、供煤气、长距离输送石油和天然气、农业灌溉、水力工程和各种工业装置中,在管道排布和安装过程中,为了保障相邻管道能够快速对接以及管道接口处的密封性,需要在管道对接时确定前后管道是否在同一轴线上或接口端是否对齐,一般的在管道排布安装过程,都是由工人自行检查和对接。
2、公布号cn 117090997 a的发明专利中提出一种管道连接纠偏巡检机器人,为了保障相邻管道能够快速对接以及管道接口处的密封性,需要在管道对接时确定前后管道是否在同一轴线上或接口端是否对齐,本发明通过将纠偏机构设置在机架上,利用行走机构带动机架和纠偏机构在管道内移动,对管道进行巡检,在发现相邻管道的接口存在错位或扭曲时,将纠偏头伸入前段管道的接口内侧,纠偏座位于后段管道接口处,随后张紧组件缓慢将纠偏头和纠偏座向外展开,直到纠偏座紧贴后段管道的接口内圈边缘,而此时纠偏头也将错位的管道接口与后段管道接口对齐。本发明既可以用于管道的排布安装也可以用于管道巡检,结构简单、操作方便。
3、上述方案在实际使用过程中,虽然能够实现辅助连接功能,但其结构较为复杂,其中每个纠偏座需要单独的驱动件进行驱动才能够实现辅助管道连接,不仅增加了机器人的制造成本,而且两端纠偏座之间的同步性较差,导致纠偏效果不佳,因此,本发明提供了一种管道连接纠偏巡检机器人来满足需求。
技术实现思路
1、为解决上述技术问题,本发明提供如下技术方案:
2、一种管道连接纠偏巡检机器人,包括控制终端,所述控制终端的两端均固定连接有固定架;驱动组件,所述驱动组件用于带动控制终端进行移动,所述驱动组件与固定架相连接;纠偏组件,所述纠偏组件用于调节对接管道的位置,所述纠偏组件与驱动组件相连接。
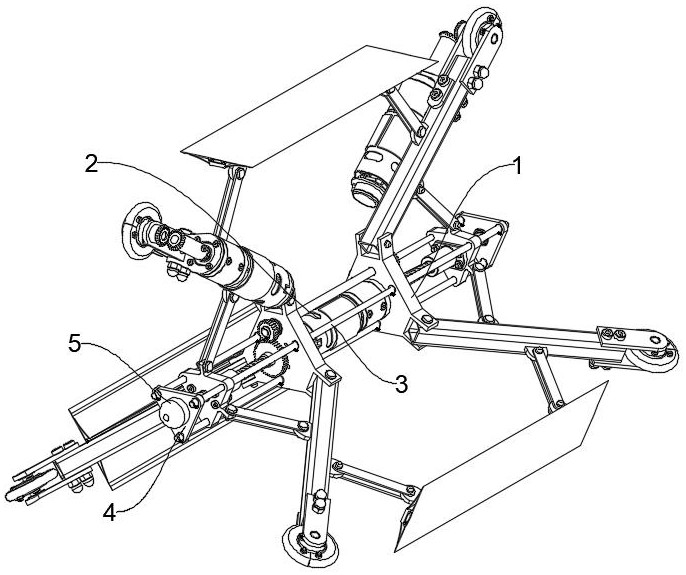
3、可选地,所述固定架为三角结构,所述驱动组件包括转动连接在两个固定架每个角上的支撑架,所述支撑架的一端转动连接有脚轮,所述控制终端的内部固定连接有电机,两个所述固定架的两侧均转动连接有一号齿轮,且其中一个一号齿轮固定连接在电机的输出轴上,两个所述一号齿轮的内部均固定连接有一号螺杆,两个所述一号螺杆的外部均螺纹连接有螺纹套,两个所述螺纹套的一侧均固定连接有传动板,两块所述传动板也为三角结构,且两个传动板的每个侧边上均转动连接有一号连接板,每个所述一号连接板的另一端均与支撑架的一侧转动连接。
4、可选地,两个所述固定架的内部转动连接有传动杆,所述传动杆的两端均固定连接有二号齿轮,两个所述二号齿轮分别与其一侧的一号齿轮相互啮合。
5、可选地,所述固定架三角的内部均固定连接有固定杆,三根所述固定杆的两端均固定连接有侧板,所述侧板的两侧均固定连接有摄像头。
6、可选地,所述纠偏组件包括转动连接在每个支撑架与连接一号连接板相反面上的二号连接板,每个所述二号连接板的另一端均转动连接有导向块,且每两个相对设置的导向块顶端的外部均滑动连接有一个贴合板。
7、可选地,所述贴合板内腔的底部固定连接有双轴电机,所述双轴电机的两个输出轴上均固定连接有二号螺杆,且两个二号螺杆分别螺纹连接在两个导向块的内部。
8、可选地,两个所述固定架两侧的六个支撑架中的两个支撑架外部固定连接有驱动电机,且驱动电机的输出轴上均固定连接有一号驱动齿轮,且该支撑架中脚轮旋转轴的一侧固定连接有二号驱动齿轮,且一号驱动齿轮的底部与二号驱动齿轮的一侧相互啮合。
9、可选地,所述贴合板包括支撑部,所述支撑部内腔的底部开设有导向槽,所述导向槽与导向块的顶端滑动连接,所述支撑部的顶部设有一号接触面,所述支撑部的内部开设有一号形变空腔,所述一号形变空腔内腔的顶部设有复位件,所述复位件为较扁平的“u”形结构,所述支撑部顶部的两侧设有二号接触面,所述支撑部顶端两侧的底部与底部的两侧之间设有弧形支撑板。
10、可选地,所述一号接触面表面有一定弧度的凸起,且一号接触面与一号形变空腔内腔顶部之间的厚度值为三厘米,所述复位件的厚度值为两厘米,所述弧形支撑板的厚度值为两厘米,所述弧形支撑板与支撑部之间设有二号形变空腔,所述二号形变空腔与二号接触面之间的厚度值为三厘米。
11、可选地,所述贴合板为一体成型结构。
12、本发明与现有技术相比,至少具有如下有益效果:
13、上述方案中,通过设置驱动组件,可以在巡检机器人的使用过程中,将纠偏座与驱动组件进行一体化设计,不仅降低了制造成本,而且极大地提高了两个管道纠偏时的同步性。
14、上述方案中,通过设置纠偏组件,可以在巡检机器人的使用过程中,通过三个贴合板配合驱动组件的扩张可以实现两个管道对接处的贴合对齐,进而能够提高管道连接纠偏的效果。
15、上述方案中,通过设置贴合件,在贴合管道内壁时,可以通过贴合件自身受到压力发生的形变使得贴合件能够根据管道的形状与其更加紧密地贴合,进而能够保证管道在纠偏过程中,受到的挤压力更加均匀。
技术特征:1.一种管道连接纠偏巡检机器人,包括控制终端(2),其特征在于,所述控制终端(2)的两端均固定连接有固定架(1);
2.根据权利要求1所述的管道连接纠偏巡检机器人,其特征在于,所述固定架(1)为三角结构,所述驱动组件包括转动连接在两个固定架(1)每个角上的支撑架(12),所述支撑架(12)的一端转动连接有脚轮(14),所述控制终端(2)的内部固定连接有电机,两个所述固定架(1)的两侧均转动连接有一号齿轮(6),且其中一个一号齿轮(6)固定连接在电机的输出轴上,两个所述一号齿轮(6)的内部均固定连接有一号螺杆(7),两个所述一号螺杆(7)的外部均螺纹连接有螺纹套(10),两个所述螺纹套(10)的一侧均固定连接有传动板(11),两个所述传动板(11)也为三角结构,且两个传动板(11)的每个侧边上均转动连接有一号连接板(13),每个所述一号连接板(13)的另一端均与支撑架(12)的一侧转动连接。
3.根据权利要求2所述的管道连接纠偏巡检机器人,其特征在于,两个所述固定架(1)的内部转动连接有传动杆(9),所述传动杆(9)的两端均固定连接有二号齿轮(8),两个所述二号齿轮(8)分别与其一侧的一号齿轮(6)相互啮合。
4.根据权利要求2所述的管道连接纠偏巡检机器人,其特征在于,所述固定架(1)三角的内部均固定连接有固定杆(3),三根所述固定杆(3)的两端均固定连接有侧板(4),所述侧板(4)的两侧均固定连接有摄像头(5)。
5.根据权利要求2所述的管道连接纠偏巡检机器人,其特征在于,所述纠偏组件包括转动连接在每个支撑架(12)与连接一号连接板(13)相反面上的二号连接板(15),每个所述二号连接板(15)的另一端均转动连接有导向块(16),且每两个相对设置的导向块(16)顶端的外部均滑动连接有一个贴合板(17)。
6.根据权利要求5所述的管道连接纠偏巡检机器人,其特征在于,所述贴合板(17)内腔的底部固定连接有双轴电机(18),所述双轴电机(18)的两个输出轴上均固定连接有二号螺杆(20),且两个二号螺杆(20)分别螺纹连接在两个导向块(16)的内部。
7.根据权利要求2所述的管道连接纠偏巡检机器人,其特征在于,两个所述固定架(1)两侧的六个支撑架(12)中的两个支撑架(12)外部固定连接有驱动电机(21),且驱动电机(21)的输出轴上均固定连接有一号驱动齿轮(22),且该支撑架(12)中脚轮(14)旋转轴的一侧固定连接有二号驱动齿轮(23),且一号驱动齿轮(22)的底部与二号驱动齿轮(23)的一侧相互啮合。
8.根据权利要求5所述的管道连接纠偏巡检机器人,其特征在于,所述贴合板(17)包括支撑部(171),所述支撑部(171)内腔的底部开设有导向槽,所述导向槽与导向块(16)的顶端滑动连接,所述支撑部(171)的顶部设有一号接触面(172),所述支撑部(171)的内部开设有一号形变空腔(173),所述一号形变空腔(173)内腔的顶部设有复位件(174),所述复位件(174)为较扁平的“u”形结构,所述支撑部(171)顶部的两侧设有二号接触面(175),所述支撑部(171)顶端两侧的底部与底部的两侧之间设有弧形支撑板(176)。
9.根据权利要求8所述的管道连接纠偏巡检机器人,其特征在于,所述一号接触面(172)表面有一定弧度的凸起,且一号接触面(172)与一号形变空腔(173)内腔顶部之间的厚度值为三厘米,所述复位件(174)的厚度值为两厘米,所述弧形支撑板(176)的厚度值为两厘米,所述弧形支撑板(176)与支撑部(171)之间设有二号形变空腔(177),所述二号形变空腔(177)与二号接触面(175)之间的厚度值为三厘米。
10.根据权利要求9所述的管道连接纠偏巡检机器人,其特征在于,所述贴合板(17)为一体成型结构。
技术总结本发明提供一种管道连接纠偏巡检机器人,属于管道连接技术领域。包括控制终端,控制终端的两端均固定连接有固定架;驱动组件,驱动组件用于带动控制终端进行移动,驱动组件与固定架相连接;纠偏组件,纠偏组件用于调节对接管道的位置,纠偏组件与驱动组件相连接,固定架为三角结构。本发明通过设置驱动组件,可以在巡检机器人的使用过程中,将纠偏座与驱动组件进行一体化设计,不仅降低了制造成本,而且极大地提高了两个管道纠偏时的同步性,通过设置纠偏组件,可以在巡检机器人的使用过程中,通过三个贴合板配合驱动组件的扩张,可以实现两个管道对接处的贴合对齐,进而能够提高管道连接纠偏的效果。技术研发人员:陈茂晨,陈效受保护的技术使用者:道雨耐节能科技宿迁有限公司技术研发日:技术公布日:2024/9/9本文地址:https://www.jishuxx.com/zhuanli/20240911/293310.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。