一种仿生青蛙跳跃机器人
- 国知局
- 2024-09-11 15:08:07
本发明涉及跳跃机器人,具体的说,是一种仿生青蛙跳跃机器人。。
背景技术:
1、青蛙作为一种水陆两栖生物,在自然界中具有出色的适应能力和运动能力。它们可以在陆地和水中自如行动,并且能够利用四肢的柔韧性和肌肉的协调性完成各种动作。尤其是其跳跃能力更是出类拔萃。这种运动特性使得青蛙在探索复杂环境、捕食和逃避捕食者等方面具有很大的优势。若能充分仿生其运动特性,研制一款具有青蛙的卓越跳跃能力的机器人,从而充分利用其能力替代人类在狭小或者有障碍环境中执行任务,具有重大的意义以及实用价值。
2、现有的仿生青蛙跳跃机器人在设计上面临着多重挑战。它们多数依赖于电动推杆推动弹簧或传统电机驱动复杂的传动机构和连杆机构来实现跳跃。这样的构造不仅结构复杂,而且涉及的零部件数量众多,这无疑增加了机器人的制造成本和组装难度。更重要的是,这种复杂性直接导致了机器人在实际使用中的一系列问题。首先,高能耗是一个显著的问题。由于零件众多,每个零件传动都需耗能,从而导致每次跳跃都需要消耗大量的电能,这对于需要长时间或频繁跳跃的应用场景来说是一个巨大的限制。其次,由于能量在多个部件之间传递时的损失,机器人的效率往往较低。此外,复杂的机械结构更容易受到损坏,无论是意外的碰撞还是长时间的使用磨损,都可能导致机器人出现故障。维护这样一个复杂的系统不仅需要专业的知识,还可能涉及高昂的成本和长时间的停机。不仅如此,这些复杂的机构还使得机器人的整体尺寸和重量偏大。这在很大程度上限制了机器人在狭小空间或需要快速移动的环境中的应用。例如,在灾难救援现场或军事侦察任务中,一个轻便、紧凑的机器人可能更容易进入危险区域并完成任务。因此,现有的仿生青蛙跳跃机器人在设计和性能上仍有很大的改进空间。
技术实现思路
1、本发明的目的在于提供一种仿生青蛙跳跃机器人,以解决因传统设计导致的零件数量多、结构复杂等缺陷衍生出来的机器人动作能耗高、效率低的问题。
2、为了解决上述问题,本发明采用以下技术手段:
3、一种仿生青蛙跳跃机器人,包括:
4、驱动模块,设于壳体内,包括与所述壳体固定连接的转动输出机构,所述转动输出机构的动力输出端通过不完全齿轮啮合连接有伸缩机构,所述伸缩机构的伸缩端从所述壳体的尾端伸出;
5、后肢模块,包括依次连接的大腿块、弹性关节、小腿块以及第一支撑块,所述大腿块与所述壳体的侧壁铰接,所述第一支撑块与所述小腿块铰接,所述小腿块的端部同时与所述伸缩机构的伸缩端铰接;
6、前肢模块,构造于所述壳体的外壁。
7、作为优选的,所述转动输出机构包括与所述壳体内壁顶面固定连接的电机盒,所述电机盒内安装有双头转动电机,所述双头转动电机的动力输出端与所述壳体的侧壁垂直设置,且分别安装有所述不完全齿轮,所述电机盒的底面构造有穿过通道,所述不完全齿轮的下方齿体穿过所述穿过通道伸出所述电机盒与所述伸缩机构啮合。
8、进一步的,所述电机盒的顶端安装有用于定位所述伸缩机构的安装板,所述伸缩机构包括一对滑动穿过所述安装板的限位杆,所述限位杆的一端伸出所述壳体作为所述伸缩端,两所述限位杆位于所述壳体内的一端均固定安装在衔接板上,所述电机盒的下方构造有滑动板,所述滑动板上构造有与所述不完全齿轮啮合的齿条,所述滑动板的一端通过第一连接杆与所述衔接板固定连接,所述滑动板的另一端通过第二连接杆固定连接有抵接板,两所述限位杆分别滑动穿过所述抵接板,所述限位杆上套设有第一压缩弹簧,所述第一压缩弹簧的两端分别与所述抵接板以及所述安装板抵接。
9、更进一步的,所述安装板朝向所述衔接板的一面安装有减震橡胶块。
10、更进一步的,所述大腿块和所述小腿块均为塑料块,所述弹性关节为弹簧钢。
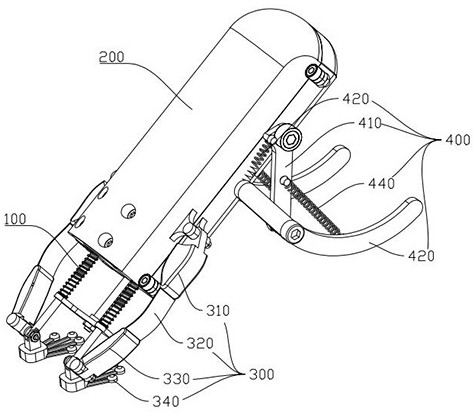
11、更进一步的,所述前肢模块包括与所述壳体外壁铰接的第一支撑杆,所述第一支撑杆的底端铰接有圆弧结构的第二支撑,所述第一支撑杆铰接在所述第二支撑杆的杆体上,所述第一支撑杆与所述壳体的铰接端与所述第二支撑杆的顶端通过第二压缩弹簧连接,所述第二支撑杆的下游杆体与所述第一支撑杆的杆体通过第三压缩弹簧连接。
12、本发明在使用的过程中,具有以下有益效果:
13、本发明的机器人,采用部分柔顺设计,即让后置模块形成以弹性关节组成的柔顺设计,成功地简化了结构,减少了零件数量,从而降低了制造装配成本。同时,这种设计还使得机器人的动作更为流畅,大大提高了其工作效率,降低了能耗。与传统的仿生青蛙机器人相比,本发明的机器人具有更高的可靠性,维护起来也更为方便。
技术特征:1.一种仿生青蛙跳跃机器人,其特征在于,包括:
2.根据权利要求1所述的一种仿生青蛙跳跃机器人,其特征在于,所述转动输出机构(110)包括与所述壳体(200)内壁顶面固定连接的电机盒(111),所述电机盒(111)内安装有双头转动电机(112),所述双头转动电机(112)的动力输出端与所述壳体(200)的侧壁垂直设置,且分别安装有所述不完全齿轮(120),所述电机盒(111)的底面构造有穿过通道,所述不完全齿轮(120)的下方齿体穿过所述穿过通道伸出所述电机盒(111)与所述伸缩机构(130)啮合。
3.根据权利要求2所述的一种仿生青蛙跳跃机器人,其特征在于,所述电机盒(111)的顶端安装有用于定位所述伸缩机构(130)的安装板(500),所述伸缩机构(130)包括一对滑动穿过所述安装板(500)的限位杆(131),所述限位杆(131)的一端伸出所述壳体(200)作为所述伸缩端,两所述限位杆(131)位于所述壳体(200)内的一端均固定安装在衔接板(132)上,所述电机盒(111)的下方构造有滑动板(133),所述滑动板(133)上构造有与所述不完全齿轮(120)啮合的齿条(134),所述滑动板(133)的一端通过第一连接杆(135)与所述衔接板(132)固定连接,所述滑动板(133)的另一端通过第二连接杆(136)固定连接有抵接板(137),两所述限位杆(131)分别滑动穿过所述抵接板(137),所述限位杆(131)上套设有第一压缩弹簧(138),所述第一压缩弹簧(138)的两端分别与所述抵接板(137)以及所述安装板(500)抵接。
4.根据权利要求3所述的一种仿生青蛙跳跃机器人,其特征在于,所述安装板(500)朝向所述衔接板(132)的一面安装有减震橡胶块(600)。
5.根据权利要求1所述的一种仿生青蛙跳跃机器人,其特征在于,所述大腿块(310)和所述小腿块(330)均为塑料块,所述弹性关节(320)为弹簧钢。
6.根据权利要求1所述的一种仿生青蛙跳跃机器人,其特征在于,所述前肢模块(400)包括与所述壳体(200)外壁铰接的第一支撑杆(410),所述第一支撑杆(410)的底端铰接有圆弧结构的第二支撑杆(420),所述第一支撑杆(410)铰接在所述第二支撑杆(420)的杆体上,所述第一支撑杆(410)与所述壳体(200)的铰接端与所述第二支撑杆(420)的顶端通过第二压缩弹簧(430)连接,所述第二支撑杆(420)的下游杆体与所述第一支撑杆(410)的杆体通过第三压缩弹簧(440)连接。
技术总结本发明公开了一种仿生青蛙跳跃机器人,涉及跳跃机器人技术领域。本发明包括:驱动模块,设于壳体内,包括与所述壳体固定连接的转动输出机构,所述转动输出机构的动力输出端通过不完全齿轮啮合连接有伸缩机构,所述伸缩机构的伸缩端从所述壳体的尾端伸出;后肢模块,包括依次连接的大腿块、弹性关节、小腿块以及第一支撑块,所述大腿块与所述壳体的侧壁铰接,所述第一支撑块与所述小腿块铰接,所述小腿块的端部同时与所述伸缩机构的伸缩端铰接;前肢模块,构造于所述壳体的外壁;以解决因传统设计导致的零件数量多、结构复杂等缺陷衍生出来的机器人动作能耗高、效率低的问题。技术研发人员:王旗华,刘志学,杨启睿,唐旭,黄康受保护的技术使用者:成都航空职业技术学院技术研发日:技术公布日:2024/9/9本文地址:https://www.jishuxx.com/zhuanli/20240911/293327.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。