机器人交互方法、装置、机器人、存储介质及产品与流程
- 国知局
- 2024-09-14 14:24:28
本申请涉及计算机,特别涉及一种机器人交互方法、装置、机器人、存储介质及产品。
背景技术:
1、随着计算机技术的发展,机器人的应用越来越广泛;例如,家庭使用扫地机器人打扫卫生,餐厅使用送餐机器人送餐等。而机器人可以与手机等移动终端进行信息交互;例如,移动终端可以控制机器人的移动轨迹;再如,机器人可以将采集到的视频发送至移动终端。
2、相关技术中是移动终端和机器人接入同一个无线路由器,借助于无线路由器构建的无线局域网进行信息交互。而由于无线路由器的覆盖范围有限,从而既限制了机器人的移动范围,又限制了移动终端的使用范围,也即上述方法的局限性较强。
技术实现思路
1、本申请实施例提供了一种机器人交互方法、装置、机器人、存储介质及产品,能够提高应用的广泛性。所述技术方案如下:
2、一方面,提供了一种机器人交互方法,所述方法由机器人执行,所述机器人的操作系统为机器人操作系统ros,且所述机器人中设有ros-实时通信rtc代理proxy组件;所述方法包括:
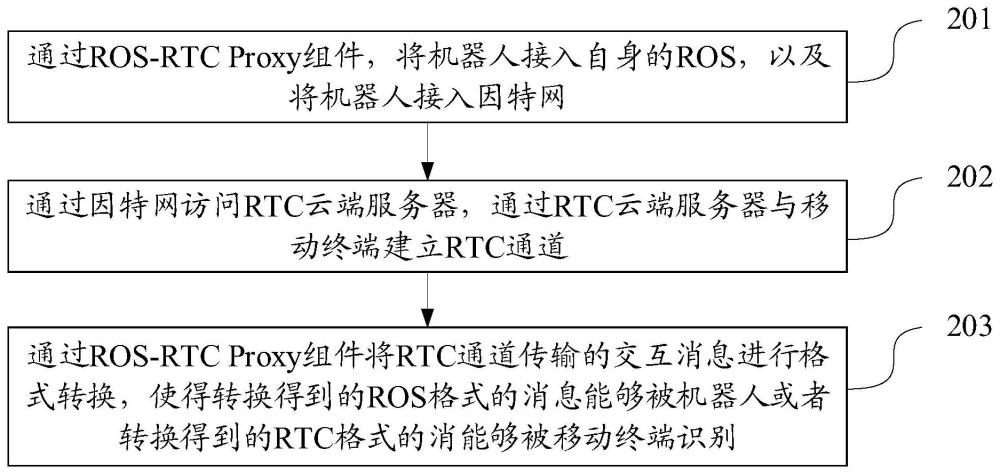
3、通过所述ros-rtc proxy组件,将所述机器人接入自身的ros,以及将所述机器人接入因特网;
4、通过所述因特网访问rtc云端服务器,通过所述rtc云端服务器与移动终端建立rtc通道;
5、通过所述ros-rtc proxy组件对所述rtc通道传输的交互消息进行格式转换,使得转换得到的ros格式的消息能够被所述机器人识别或者转换得到的rtc格式的消息能够被所述移动终端识别。
6、另一方面,提供了一种机器人交互装置,所述装置应用在机器人中,所述机器人的操作系统为机器人操作系统ros,且所述机器人中设有ros-实时通信rtc代理proxy组件;所述装置包括:
7、接入模块,用于通过所述ros-rtc proxy组件,将所述机器人接入自身的ros,以及将所述机器人接入因特网;
8、建立模块,用于通过所述因特网访问rtc云端服务器,通过所述rtc云端服务器与移动终端建立rtc通道;
9、转换模块,用于通过所述ros-rtc proxy组件对所述rtc通道传输的交互消息进行格式转换,使得转换得到的ros格式的消息能够被所述机器人识别或者转换得到的rtc格式的消息能够被所述移动终端识别。
10、另一方面,提供了一种机器人,所述机器人包括处理器和存储器,所述存储器中存储有至少一条程序代码,所述至少一条程序代码由所述处理器加载并执行,以实现上述所述的机器人交互方法。
11、另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有至少一条程序代码,所述至少一条程序代码由处理器加载并执行,以实现上述所述的机器人交互方法。
12、另一方面,提供了一种计算机程序产品,所述计算机程序产品中存储有至少一条程序代码,所述至少一条程序代码由处理器加载并执行,以实现上述所述的机器人交互方法。
13、本申请实施例提供的技术方案带来的有益效果是:
14、在本申请实施例中,在操作系统为ros的机器人中设置ros-rtc proxy组件,并且引入rtc云端服务器;由于ros-rtc proxy组件不仅能接入ros,还能够接入因特网,这样,机器人通过因特网访问rtc云端服务器,通过rtc云端服务器与移动终端之间建立rtc通道,通过rtc通道传输交互消息。然而由于ros能够识别ros格式的交互消息,而移动终端能够识别rtc格式的交互消息,因此,通过ros-rtc proxy组件对ros格式的交互消息和rtc格式的交互消息进行转换,从而真正打通机器人和移动终端之间的rtc通道,实现解除机器人与移动终端只能在本地同一个无线局域网内交互的距离限制,该方法可以将机器人与移动终端之间的交互扩展到了英特网的任意两端,提高了应用的广泛性。
15、应当理解的是,以上的一般描述和后文的细节描述仅是示例性的,并不能限制本公开。
技术特征:1.一种机器人交互方法,其特征在于,所述方法由机器人执行,所述机器人的操作系统为机器人操作系统ros,且所述机器人中设有ros-实时通信rtc代理proxy组件;所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述通过所述ros-rtc proxy组件对所述rtc通道传输的交互消息进行格式转换,包括:
3.根据权利要求2所述的方法,其特征在于,所述机器人还包括服务组件;所述方法还包括:
4.根据权利要求1所述的方法,其特征在于,所述通过所述ros-rtc proxy组件对所述rtc通道传输的交互消息进行格式转换,包括:
5.根据权利要求4所述的方法,其特征在于,所述方法还包括:
6.根据权利要求4所述的方法,其特征在于,所述机器人包括视觉感知组件和视频推送服务video push client组件;
7.一种机器人交互装置,其特征在于,所述装置应用在机器人中,所述机器人的操作系统为机器人操作系统ros,且所述机器人中设有ros-实时通信rtc代理proxy组件;所述装置包括:
8.一种机器人,其特征在于,所述机器人包括处理器和存储器,所述存储器中存储有至少一条程序代码,所述至少一条程序代码由所述处理器加载并执行,以实现如权利要求1至6任一项所述的机器人交互方法。
9.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有至少一条程序代码,所述至少一条程序代码由处理器加载并执行,以实现如权利要求1至6任一项所述的机器人交互方法。
10.一种计算机程序产品,其特征在于,所述计算机程序产品中存储有至少一条程序代码,所述至少一条程序代码由处理器加载并执行,以实现如权利要求1至6任一项所述的机器人交互方法。
技术总结本申请公开了一种机器人交互方法、装置、机器人、存储介质及产品,属于计算机技术领域。方法由机器人执行,机器人的操作系统为ROS,且机器人中设有ROS‑RTC Proxy组件;方法包括:通过ROS‑RTC Proxy组件,将机器人接入自身的ROS,以及将机器人接入因特网;通过因特网访问RTC云端服务器,通过RTC云端服务器与移动终端建立RTC通道;通过ROS‑RTC Proxy组件对RTC通道传输的交互消息进行格式转换,使得转换得到的ROS格式的消息能够被机器人识别或者转换得到的RTC格式的消息能够被移动终端识别。本申请可以将机器人与移动终端之间的交互扩展到了英特网的任意两端,提高了应用的广泛性。技术研发人员:吴价受保护的技术使用者:OPPO广东移动通信有限公司技术研发日:技术公布日:2024/9/12本文地址:https://www.jishuxx.com/zhuanli/20240914/293903.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表