一种陆地风机塔筒预应力螺栓轴力检测机器人
- 国知局
- 2024-09-11 15:11:21
本发明涉及风机螺栓检测,具体涉及一种陆地风机塔筒预应力螺栓轴力检测机器人。
背景技术:
1、在风力发电领域中,在安装陆地风机塔筒时,在风电机组中,所使用的螺栓成千上万,而为了保证陆地风机塔筒的正常运行,就需要对螺栓轴力进行定时检测以防止松动,而在检测过程中,通过螺栓外露段结构响应可以快速准确测量螺栓实际轴力,因此可通过声测传感系统来实现螺栓的检测。
2、但由于风电机组中螺栓数量较多,且塔筒中紧固螺栓呈圆周均匀分布,配合塔筒的金属材质,可在塔筒内壁利用磁吸爬壁机器人和声测传感系统的配合来实现螺栓检测,而现有的陆地风机塔筒预应力螺栓轴力检测机器人在使用过程中还存在以下缺陷:
3、1、现有的陆地风机塔筒预应力螺栓轴力检测机器人在使用过程中,是通过单个磁吸爬壁机器人在塔筒内部进行圆周移动来实现检测,检测效率有待提高,且磁吸爬壁机器人需要携带声测传感系统和相关处理模块及线束等,使得磁吸爬壁机器人受力较大,加大了磁吸的压力,也影响利用磁吸移动的稳定性,而当发生故障,无法供电产生磁力时,磁吸爬壁机器人就会掉落,进而造成损毁;
4、2、在利用磁吸爬壁机器人移动进行螺栓检测过程中,当利用磁吸爬行爪进行移动使探头与螺栓对齐后,再进行圆周移动逐一检测过程中,需要利用复杂的对准系统来控制磁吸爬行爪使探头与螺栓依次对齐,而在塔筒不同高度处,塔筒的内径和螺栓的间隙都会发生改变,需要重新进行调试,操作的难度大,且增加了检测机器人的制造成本。
技术实现思路
1、本发明的目的在于:为解决上述磁吸爬壁机器人负重大,加大了磁吸的压力,影响利用磁吸移动的稳定性,当磁力因故障丧失时,检测机器人容易发生坠毁,以及利用复杂系统驱动爬行爪进行逐一对准,操作难度大,且增加了检测机器人制造成本的问题,本发明提供了一种陆地风机塔筒预应力螺栓轴力检测机器人。
2、本发明为了实现上述目的具体采用以下技术方案:
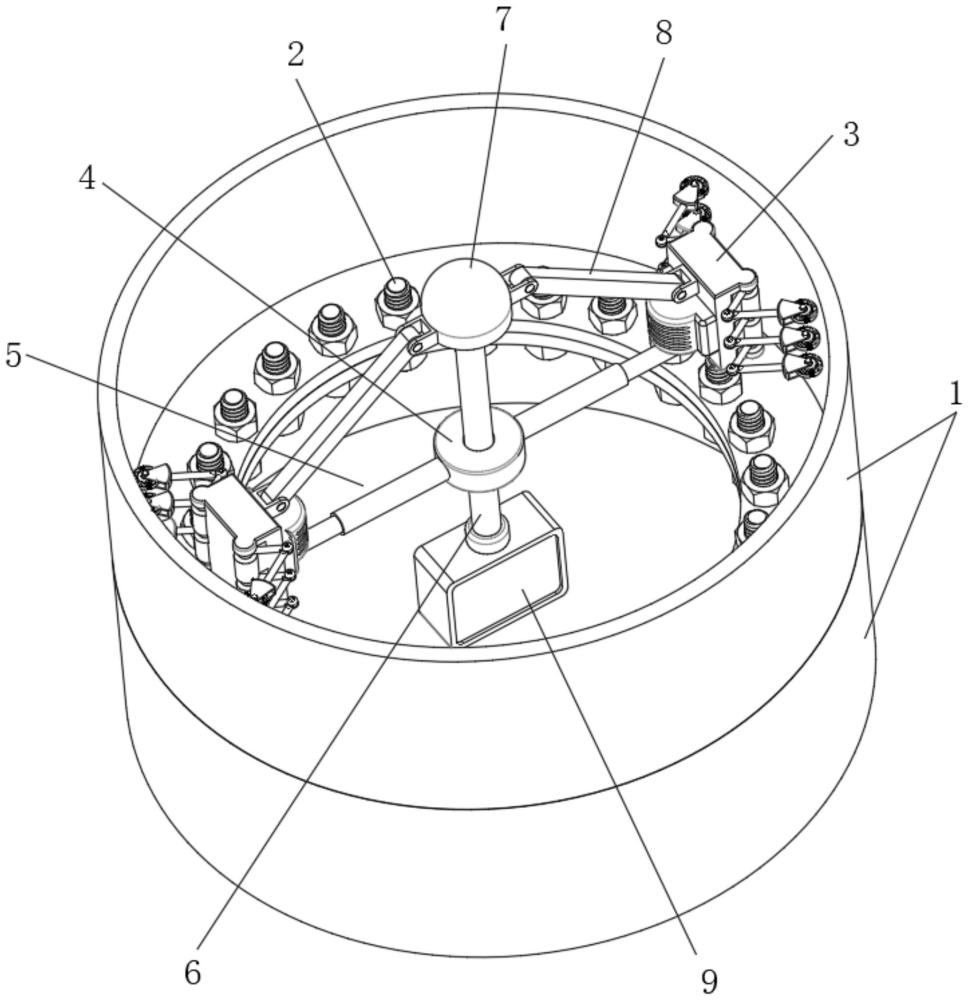
3、一种陆地风机塔筒预应力螺栓轴力检测机器人,包括塔筒和螺栓,所述塔筒通过螺栓上下固定安装,所述塔筒内侧螺栓的上方对称放置有爬行机器人,所述爬行机器人之间的中央设置有圆柱块,所述圆柱块与爬行机器人之间设置有伸缩连接件,所述圆柱块的中部贯穿滑动连接有竖杆,所述竖杆的顶端固定安装有顶座,所述顶座两侧与爬行机器人之间传动连接有传动杆,所述竖杆的顶端固定安装有控制箱。
4、进一步地,所述伸缩连接件包括套筒,所述圆柱块外围两端对称固定安装有套筒,所述套筒内部远离圆柱块的一侧滑动连接有伸缩杆,所述伸缩杆外侧一端与爬行机器人相邻一端固定安装,所述伸缩杆位于套筒内部一端与套筒内壁之间固定连接有弹簧,使得爬行机器人与圆柱块之间通过伸缩连接件弹性限位连接。
5、进一步地,所述顶座的高度位于爬行机器人的上方,两侧所述传动杆从上至下斜向两侧倾斜,因此,当顶座受到控制箱向下的重力时,通过传动杆能够给予两侧爬行机器人朝向塔筒内壁的力。
6、进一步地,所述爬行机器人的底端固定安装有伸缩探头,所述伸缩探头可进行上下伸缩,所述伸缩探头和爬行机器人经过导线与控制箱相连接,使得伸缩探头在与螺栓对齐后能够下移与螺栓接触完成检测,而在跟随爬行机器人移动过程中,能够向上收缩。
7、进一步地,所述爬行机器人靠近塔筒内壁的一侧传动安装有爬行爪,所述爬行爪通过控制箱控制驱动,单个所述爬行机器人上爬行爪的数量共有六个,且在爬行机器人两侧对称分布,所述爬行爪远离爬行机器人的一侧固定安装有安装座,所述安装座的内侧设置有磁吸组件,所述磁吸组件与塔筒内壁磁性吸附,进而利用磁吸组件来实现爬行机器人与塔筒内壁的吸附,同时利用爬行爪驱动磁吸组件的移动,来实现爬行机器人在塔筒内壁的移动。
8、进一步地,所述磁吸组件包括转轴,所述安装座之间转动连接有转轴,所述转轴外侧对称滑动连接有两根连接套杆,所述连接套杆远离转轴的一端均固定安装有收卷座,所述收卷座远离连接套杆的一侧收卷有磁条,且单个所述收卷座上用于收卷的卷筒有两个,磁条能够吸附与塔筒内壁表面,所述转轴外侧对称滑动连接有两根固定套杆,且两根固定套杆与两根连接套杆相互垂直,所述固定套杆远离转轴的一端固定安装有强磁块,所述转轴外侧均匀滑动连接有套座,所述套座远离转轴的一侧转动连接有滚筒。
9、进一步地,所述磁条在两侧收卷座之间形成对称的半圆形,使得磁条能够形成一个滚轮,且所述固定套杆相互远离的一端与半圆形磁条的中部固定安装,且所述强磁块延伸至磁条的外围,并与磁条的圆弧面相齐平,所述强磁块的磁性大于磁条的磁性,使得在磁条转动过程中,中部的强磁块能够更好地与塔筒内壁相吸附,且所述强磁块和磁条的磁力通过控制箱控制,来配合爬行爪的控制移动。
10、进一步地,单个所述磁吸组件内套座和滚筒的组合共有四组,在转轴外侧均匀分布,所述滚筒与磁条的内壁相贴附,且所述套座和滚筒均位于连接套杆与固定套杆之间,进而来对磁条进行稳定支撑,配合连接套杆和固定套杆来使磁条更好地保持呈半圆形。
11、进一步地,所述磁吸组件还包括固定杆,所述连接套杆、固定套杆和套座的上下两端固定安装有固定杆,所述转轴外侧的上下两侧对称转动连接有转盘,所述转盘通过控制箱独立控制相对转轴进行转动,所述转盘的内部开设有螺旋槽,且所述连接套杆、固定套杆和套座上下两端的固定杆限位滑动在螺旋槽的内部,因此在驱动转盘发生转动时,能够通过螺旋槽驱动固定杆进行伸缩移动,进而带动连接套杆、固定套杆和套座进行同步的伸缩移动。
12、进一步地,所述安装座的上下两端固定安装有驱动马达,所述驱动马达与转轴传动连接,所述驱动马达通过控制箱控制驱动转轴进行转动,使得驱动马达能够驱动转轴进行转动,进而带动形成滚轮的磁条进行转动。
13、本发明的有益效果如下:
14、1、本发明,通过两侧爬行机器人在塔筒内壁对称的设计,利用爬行机器人塔筒内壁的转动来实现螺栓的逐一检测,提高了检测效率的同时,利用传动杆、顶座和竖杆的配合,能够将携带控制箱的重力转换为推动爬行机器人靠近塔筒内壁的力,减缓磁吸的压力,使得爬行机器人的移动更加稳定,同时在丧失磁力时,也能够避免爬行机器人的掉落损毁。
15、2、本发明,通过磁吸组件的设计,能够配合爬行爪进行移动校准的同时,利用驱动磁条形成滚轮的间歇转动,就能够实现对于均匀分布的螺栓进行逐一检测,使得在依次对螺栓进行检测过程中,对于爬行机器人的转动操作更加简单,同时在面对不同间距的螺栓时,只需要通过转动转盘改变磁条形成滚轮的直径即可,使得检测机器人在依次检测过程中,实现方式更加简单,便于操作,也降低了制造成本。
技术特征:1.一种陆地风机塔筒预应力螺栓轴力检测机器人,包括塔筒(1)和螺栓(2),其特征在于,所述塔筒(1)通过螺栓(2)上下固定安装,所述塔筒(1)内侧螺栓(2)的上方对称放置有爬行机器人(3),所述爬行机器人(3)之间的中央设置有圆柱块(4),所述圆柱块(4)与爬行机器人(3)之间设置有伸缩连接件(5),所述圆柱块(4)的中部贯穿滑动连接有竖杆(6),所述竖杆(6)的顶端固定安装有顶座(7),所述顶座(7)两侧与爬行机器人(3)之间传动连接有传动杆(8),所述竖杆(6)的顶端固定安装有控制箱(9);
2.根据权利要求1所述的陆地风机塔筒预应力螺栓轴力检测机器人,其特征在于,所述伸缩连接件(5)包括:
3.根据权利要求1所述的陆地风机塔筒预应力螺栓轴力检测机器人,其特征在于,所述顶座(7)的高度位于爬行机器人(3)的上方,两侧所述传动杆(8)从上至下斜向两侧倾斜。
4.根据权利要求1所述的陆地风机塔筒预应力螺栓轴力检测机器人,其特征在于,所述磁吸组件(13)包括:
5.根据权利要求4所述的陆地风机塔筒预应力螺栓轴力检测机器人,其特征在于,所述磁条(134)在两侧收卷座(133)之间形成对称的半圆形,且所述固定套杆(135)相互远离的一端与半圆形磁条(134)的中部固定安装,且所述强磁块(136)延伸至磁条(134)的外围,并与磁条(134)的圆弧面相齐平,所述强磁块(136)的磁性大于磁条(134)的磁性,且所述强磁块(136)和磁条(134)的磁力通过控制箱(9)控制。
6.根据权利要求4所述的陆地风机塔筒预应力螺栓轴力检测机器人,其特征在于,单个所述磁吸组件(13)内套座(137)和滚筒(138)的组合共有四组,在转轴(131)外侧均匀分布,所述滚筒(138)与磁条(134)的内壁相贴附,且所述套座(137)和滚筒(138)均位于连接套杆(132)与固定套杆(135)之间。
7.根据权利要求4所述的陆地风机塔筒预应力螺栓轴力检测机器人,其特征在于,所述磁吸组件(13)还包括:
8.根据权利要求4所述的陆地风机塔筒预应力螺栓轴力检测机器人,其特征在于,所述安装座(12)的上下两端固定安装有驱动马达(14),所述驱动马达(14)与转轴(131)传动连接,所述驱动马达(14)通过控制箱(9)控制驱动转轴(131)进行转动。
技术总结本发明公开了一种陆地风机塔筒预应力螺栓轴力检测机器人,涉及风机螺栓检测技术领域。本发明包括塔筒和螺栓,所述塔筒通过螺栓上下固定安装,所述塔筒内侧螺栓的上方对称放置有爬行机器人,所述爬行机器人之间的中央设置有圆柱块,所述圆柱块与爬行机器人之间设置有伸缩连接件,所述圆柱块的中部贯穿滑动连接有竖杆,所述竖杆的顶端固定安装有顶座,所述顶座两侧与爬行机器人之间传动连接有传动杆。本发明提高了检测效率的同时,减缓磁吸的压力,使得爬行机器人的移动更加稳定,同时在丧失磁力时,也能够避免爬行机器人的掉落损毁,能够使检测机器人在依次检测过程中,实现方式更加简单,便于操作,也降低了制造成本。技术研发人员:赵超,蔡滔涛,刘红霞,钟新谷,彭雄,胡泳森,田坤龙受保护的技术使用者:湖南科技大学技术研发日:技术公布日:2024/9/9本文地址:https://www.jishuxx.com/zhuanli/20240911/293494.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种仿生青蛙跳跃机器人
下一篇
返回列表