复杂海工钢结构自适应喷砂作业机器人及作业方法与流程
- 国知局
- 2024-09-11 15:08:17
本发明涉及海洋工程,具体涉及一种复杂海工钢结构自适应喷砂作业机器人及作业方法。
背景技术:
1、当前,国内在处理大型海洋工程模块的喷砂作业时,主要依赖手工操作。这种方式存在几个显著问题:首先,沙丸破碎产生的细微粉末增加工人的劳动强度,并影响喷砂质量;其次,长期暴露于这样的工作环境中,工人容易患上职业病,如矽肺;最后,这种作业方式还会对环境造成污染。
2、随着国家对环保要求的提高、对工人健康权益的更加重视,以及人工成本的上升,开发一种自动化的喷砂作业系统已成为相关企业的迫切需求。尽管已有一些创新,如中国专利cn115709441a中公开的桥梁钢材大型喷砂设备,通过引入运输平台和移动轨道提高效率和喷砂均匀性,但这些方案在面对海洋工程模块特有的复杂性和体积时,仍显不足。
技术实现思路
1、本发明要解决的技术问题是:克服现有技术的不足,提供一种复杂海工钢结构自适应喷砂作业机器人及作业方法。
2、本发明采用的技术方案如下:
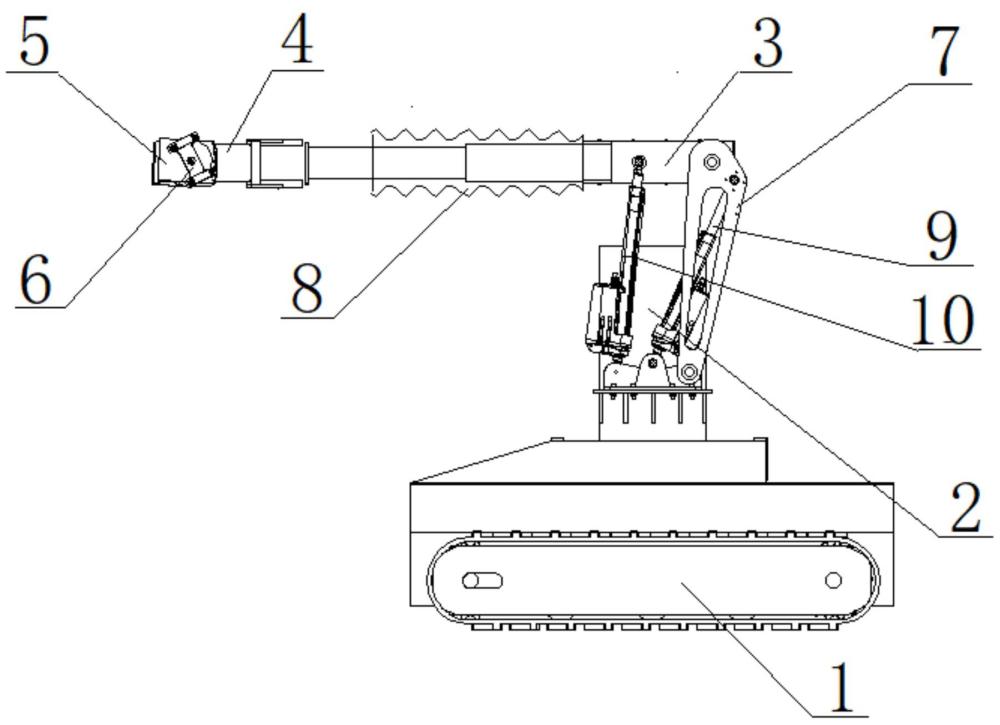
3、一种复杂海工钢结构自适应喷砂作业机器人,包括如下部件:
4、移动升降机构,用于驱动喷砂作业机器人朝向复杂海工钢结构移动,包括:
5、移动小车,采用伺服电机驱动履带轮,内部安装驱动电池及法兰连接盘,用于为整个喷砂作业机器人提供稳定的移动动力;
6、升降臂,由回转转盘、三节升降柱及驱动电机组成,第三节升降柱上焊接有连接支座,两侧对称安装轴承支座,通过驱动电机实现高度方向的调节,用于适应不同高度的作业需求;
7、关节臂调节机构,用于调整喷砂作业机器人与复杂海工钢结构之间距离,保证摆动喷砂机构始终与复杂海工钢结构距离恒定,包括:
8、伸缩臂,由两节伸缩柱组成,通过驱动电机实现长度的调整;
9、旋转臂,内置旋转电机,带动末段臂360度旋转;
10、末段臂,内置旋转电机,一端连接旋转臂,另一端为摆动喷管,并带动摆动喷管进行180°旋转,
11、摆动喷砂机构,用于对不规则表面的复杂海工钢结构进行喷砂处理,包括:
12、摆动喷管,安装在末段臂两侧,用于执行喷砂作业;
13、摆动连杆与摆动电缸,对称布置于升降臂两侧,通过控制伸缩臂相对升降臂在水平或竖直方向上进行摆动;
14、安全防护机构,用于对喷砂作业机器人进行安全防护,包括:
15、风琴罩,安装于关节臂调节机构的外部,用于防止喷砂作业过程中产生的粉尘对机械部件造成损害;
16、密封结构,安装关节臂调节机构的连接处,在密封结构上开有高压空气接口,通过通入高压空气,起到正压防尘作用。
17、本技术方案通过移动升降机构、关节臂调节机构、摆动喷砂机构和安全防护机构之间的精密配合,实现对复杂海工钢结构的高效、精准喷砂处理。具体地,移动小车采用伺服电机驱动履带轮,通过精确控制伺服电机的转速和方向,实现机器人在复杂地形上的稳定移动;伺服电机的高精度和快速响应特性,使得机器人能够灵活应对不同路况,确保作业的连续性和稳定性;内部安装的驱动电池提供持久动力,法兰连接盘则用于连接和支撑升降臂等上部结构;升降臂通过回转转盘实现水平方向上的微调,三节升降柱在驱动电机的驱动下协同工作,实现高度方向上的精确调节,不仅提高高度调节的灵活性,还增强结构的稳定性和承载能力;连接支座和轴承支座的设计,确保升降臂在升降过程中的平稳性和可靠性;伸缩臂、旋转臂和末段臂共同构成灵活多变的机械臂系统;伸缩臂通过驱动电机调整长度,以适应不同距离的作业需求;旋转臂和末段臂内置的旋转电机,则实现喷砂装置在水平和垂直方向上的全方位旋转,确保喷砂作业能够覆盖复杂海工钢结构的各个角落;摆动电缸的精确控制使得摆动喷管能够在水平或竖直方向上进行摆动,以适应不规则表面的喷砂需求,不仅提高喷砂作业的灵活性和精度,还减少人工干预,提高作业效率;风琴罩作为物理屏障,风琴罩有效隔离喷砂作业过程中产生的粉尘和碎屑,保护内部机械部件免受损害;风琴罩能够适应关节臂调节机构的复杂运动,保持密封效果;在关节臂调节机构的连接处安装密封结构,并通过高压空气接口通入高压空气,形成正压环境,有效阻止外部粉尘和潮气的侵入,进一步提高机器人的防护等级和作业环境的清洁度。
18、另外,根据本发明上述提出复杂海工钢结构自适应喷砂作业机器人还具有如下附加技术特征:
19、根据本发明的一个实施例,所述移动小车采用伺服电机驱动履带轮,内部安装驱动电池及法兰连接盘。
20、本技术方案通过采用伺服电机驱动履带轮的设计,旨在提升移动小车在复杂海工环境下的稳定性和精确性,同时内部安装的驱动电池为机器人提供持久动力,法兰连接盘则确保与上部结构的稳固连接。
21、根据本发明的一个实施例,所述摆动连杆为两个,对称布置于升降臂两侧,一端连接伸缩臂,一端连接第三节升降柱上的轴承支座。
22、本技术方案通过设置两个对称布置的摆动连杆,一端连接伸缩臂,另一端连接第三节升降柱上的轴承支座,旨在增强关节臂调节机构的稳定性和灵活性,使得喷砂作业机器人能够更好地适应不同角度和距离的喷砂需求。
23、根据本发明的一个实施例,所述摆动电缸包括摆动电缸ⅰ和摆动电缸ⅱ,其中:
24、摆动电缸ⅰ,对称布置于升降臂两侧,一端连接摆动连杆上的耳板,一端连接第三节升降柱上的轴承支座;
25、摆动电缸ⅱ,对称布置于升降臂两侧,一端连接伸缩臂上的耳板,一端连接第三节升降柱上的轴承支座。
26、本技术方案通过引入摆动电缸ⅰ和摆动电缸ⅱ,并分别对称布置于升降臂两侧,连接摆动连杆和伸缩臂与第三节升降柱的轴承支座,进一步提升机器人对喷砂作业姿态的精确控制能力,增强作业过程中的稳定性和适应性。
27、根据本发明的一个实施例,还包括激光测距机构,用于检测喷砂作业机器人与复杂海工钢结构之间距离,包括:
28、激光雷达,安装于末段臂上,通过发射朝向复杂海工钢结构的信号,分析出喷砂作业机器人当前位置与复杂海工钢结构表面的距离及角度;
29、系统根据预设的喷砂作业参数和实时距离信息,自动调整关节臂调节机构中的伸缩臂长度、旋转臂及末段臂的旋转角度,以及摆动喷砂机构的摆动角度和速度,确保喷砂头始终保持与钢结构表面恒定的安全距离和最佳喷砂角度。
30、本技术方案通过集成激光测距机构,包括安装在末段臂上的激光雷达,实时检测喷砂作业机器人与复杂海工钢结构之间的距离和角度,并基于预设的喷砂作业参数,自动调整关节臂调节机构和摆动喷砂机构的状态,确保喷砂作业始终保持在最佳的安全距离和喷砂角度,从而提高作业效率和喷砂质量。
31、为实现上述目的,本发明还提供一种复杂海工钢结构自适应喷作业方法。
32、一种复杂海工钢结构自适应喷作业方法,包括如下步骤:
33、s1、作业环境评估与模式选择:判断作业空间是否存在限制,判断作业空间是否狭小或有障碍物,以确保机器人能够安全穿越并精确定位至作业区域;
34、若空间有限制,则选择工作模式一,执行步骤s2;
35、若空间无限制,则选择工作模式二,进入步骤s3;
36、s2、工作模式一执行流程,包括如下小步:
37、s21、初始状态设定:将升降臂与伸缩臂调整至最小收缩状态,以最小化机器人整体尺寸,便于穿越复杂环境,随后移动小车精确移动至指定作业位置并固定;
38、s22、高度精确调整:通过控制升降臂的升降,实现喷砂装置在垂直方向上的精准定位,以匹配不同高度的喷砂作业需求;
39、s23、平面位置优化:结合伸缩臂的伸缩与升降臂的旋转功能,调整喷砂装置在水平面上的位置,确保喷砂作业的精确度;
40、s24、喷管角度灵活调整:利用旋转臂与末段臂的旋转,通过调整摆动喷管的角度,满足多角度喷砂作业需求;
41、s25、伸缩臂水平稳定保持:通过控制摆动电缸ⅰ与摆动电缸ⅱ,确保伸缩臂在作业保持水平状态;
42、s26、距离自适应控制与自动喷砂:预设喷管与钢结构表面的理想作业距离,并依托激光雷达实时监测并反馈实际距离,实现喷砂装置位置的自动微调,达成自动喷砂作业;
43、s3、工作模式二执行流程,包括如下小步:
44、s31、初始准备:首先通过控制摆动电缸ⅰ与摆动电缸ⅱ,将伸缩臂置于竖直状态,为后续达到更高作业位置奠定基础;
45、s32、高度与作业范围扩展:同步启动升降臂与伸缩臂的伸出功能,使喷砂装置攀升至最高作业位置,移动小车保持固定,通过关节臂调节机构协作实现作业高度的提升与作业范围的覆盖;
46、s33、多高度喷砂作业实施:在达到预定高度后,结合移动小车的移动与关节臂调节机构、摆动喷砂机构的微调功能,调整喷管角度与距离参数,确保喷砂作业的连续高效进行;
47、s34、全程监控与即时调整:利用激光雷达持续监测喷砂装置与钢结构表面的实时距离,确保作业安全无误,及时调整喷砂装置状态。
48、本技术方案确保复杂海工钢结构自适应喷砂作业的高效、安全与精确。首先,通过s1作业环境评估与模式选择,该方法根据作业空间的限制条件智能选择工作模式一或二,以适应不同的作业环境;在选择工作模式一时,其通过一系列精细的步骤——从初始状态设定到距离自适应控制与自动喷砂,逐步将喷砂装置调整至最佳作业状态,并依靠激光雷达实现喷砂距离的实时控制与微调,确保喷砂作业的精确性和安全性。而在选择工作模式二时,则侧重于通过关节臂调节机构的协作与移动小车的配合,实现作业高度与范围的广泛覆盖,并通过全程监控与即时调整来确保作业过程的连续性和高效性;整个方法通过智能化地选择作业模式、精细化地调整作业参数以及实时地监控作业状态,实现对复杂海工钢结构的高效自适应喷砂作业。
49、根据本发明的一个实施例,所述步骤s1中,系统除判断作业空间是否存在限制,还根据预设的喷砂作业区域和障碍物分布,自动规划喷砂作业机器人的最优作业路径,减少不必要的移动和等待时间,提高作业效率。
50、本技术方案中,自动规划喷砂作业机器人的最优作业路径旨在减少机器人在作业过程中的不必要移动和等待时间,从而显著提高喷砂作业的整体效率。
51、根据本发明的一个实施例,所述步骤s26或者s34的激光雷达,当检测到喷砂作业机器人与复杂海工钢结构表面距离异常靠近或发生碰撞风险时,系统自动触发紧急制动,并立即停止喷砂作业,同时发出警报信号,确保作业人员和设备的安全。
52、本技术方案通过激光雷达实现安全监测、实时反馈与快速响应的有机结合,从而确保喷砂作业机器人在复杂海工钢结构上的安全作业。
53、本发明与现有技术相比,具有以下有益效果:
54、(1)通过移动升降机构、关节臂调节机构、摆动喷砂机构和安全防护机构之间的精密配合,实现对复杂海工钢结构的高效、精准喷砂处理。
55、(2)通过安全防护机构,如风琴罩与密封结构,有效隔离粉尘与碎屑,保护作业人员健康,减少环境污染。
56、(3)既能适用于复杂不规则的海工钢结构喷砂,也能适用于规则小型的钢结构及零部件喷砂,在移动到一定位置后,通过各执行臂的配合可完成最大空间的喷砂作业,大大提高作业效率,同时结构采用竖直和水平臂的结构,提高作业安全性。
本文地址:https://www.jishuxx.com/zhuanli/20240911/293336.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表