一种暗涵声呐检测机器人的制作方法
- 国知局
- 2024-09-19 15:00:27
本技术涉及地下暗涵检测摸排设施,具体为一种暗涵声呐检测机器人。
背景技术:
1、城市排水管因常年排放的废水和废物越来越多,而这些物质还具有腐蚀性,进而造成城市排水管道的堵塞、泄露等各种功能性及结构性损坏,城市暗涵作为各排水管道的汇流管网,几乎内部均存在或多或少的雨污水,须进行及时检测,才能将各种隐患提前预知来进行修理,保证正常使用。
2、根据专利网公开的一种暗涵声呐检测机器人(授权公告号为:cn 214112808 u)中所描述“一种暗涵声呐检测机器人,包括机器人主体船、空气负压式动力系统、声呐系统、自主电源、转换接头、集成控制器、接收天线、接收单元以及调速模块;机器人主体船的尾部与空气负压式动力系统连接,机器人主体船的头部与集成控制器连接;集成控制器的尾部与转换接头连接;机器人主体船底部与声呐系统连接;机器人主体船的内壁与自主电源连接;自主电源分别与空气负压式动力系统、声呐系统、集成控制器、调速模块、接收天线以及接收单元电连接;接收天线与接收单元电连接,接收单元与调速模块电连接;节省了操作前的繁琐工作,操作步骤简单。”。
3、针对上述描述内容,申请人认为存在以下问题:
4、该实用新型在使用过程中,通过设置的双体船形式作为机器人及配置设备的搭载主体,通过空气负压式动力及系统实现机器人前进、后退、转向等功能,然而该装置在使用时,漂浮在水面上,如若水面突然有凸起则会使得船体不稳,易发生侧翻,其次在进行掉头时,仅通过空气负压式动力使得船体转向需要较大的空间,而暗河的内部环境一般较小,会使得转向较为困难,因此需要改进出一种暗涵声呐检测机器人来解决上述问题。
技术实现思路
1、本实用新型的目的在于提供一种暗涵声呐检测机器人,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种暗涵声呐检测机器人,包括左单片体与右单片体,所述左单片体与右单片体之间固定安装有固定支架,所述固定支架的正面设置有声呐探头,所述固定支架的顶部固定安装有集成控制器,所述固定支架的内部设置有辅助机构,所述固定支架的内部设置有转向机构。
3、所述辅助机构包括展开组件与减缓组件,所述减缓组件固定安装在展开组件外部。
4、优选的,所述展开组件包括第一电机与两个滑道,所述第一电机固定安装在固定支架的内部,所述滑道转动安装在左单片体与右单片体的内部,所述第一电机的输出端固定安装有齿轮,所述齿轮的外部啮合有齿条,所述齿条的内部转动安装有滑块,使得齿条移动时使得滑道进行转动展开。
5、优选的,所述滑块滑动安装在滑道内部,所述齿条的数量为两个,所述齿条滑动安装在固定支架的内部,使得展开过程平稳。
6、优选的,所述减缓组件包括矩形块,所述矩形块固定安装在滑道靠近滑块的一端,所述矩形块的内部滑动安装有两个限位架,两个所述限位架之间固定安装有圆柱,所述圆柱的外部转动安装有滚轮,所述圆柱的外部固定安装有两个限位柱,所述矩形块的外部固定安装有两个弹簧,当与暗河墙壁撞击时起到缓冲作用,保证装置正常行驶。
7、优选的,所述弹簧远离矩形块的一端固定安装在圆柱外部,所述限位柱滑动安装在矩形块内部,对弹簧压缩及回弹时起到限位作用。
8、优选的,所述转向机构包括第二电机与两个转轴,所述第二电机固定安装在固定支架的内部,所述转轴转动安装在左单片体的内部,所述第二电机的输出端固定安装有蜗杆,所述蜗杆的外部啮合有蜗轮,所述转轴的顶部设置有风扇,所述转轴的外部固定安装有皮轮a,所述皮轮a的外部传动安装有皮带,所述皮带的内侧传动安装有皮轮b,使得两个转轴同步转动。
9、优选的,所述皮轮b固定安装在转轴外部,所述蜗轮固定安装在转轴外部使得蜗杆转动可带动转轴进行转动。
10、与现有技术相比,本实用新型提供了一种暗涵声呐检测机器人,具备以下有益效果:
11、1.该暗涵声呐检测机器人,将该装置置于暗河水面,启动第一电机使得齿轮转动带动齿条滑动安装在固定支架内部,使得滑块滑动安装在滑道内部使得滑道展开,使得滚轮与暗河壁接触,使得该装置在前进过程中遭遇水面凸起也能保持平稳,不易侧翻,当暗河墙面有凸起时,限位柱滑动安装在矩形块内部,在弹簧的作用下使得撞力减缓。
12、2.该暗涵声呐检测机器人,当该装置需要转向时,启动第二电机使得蜗杆转动,带动蜗轮转动,使得转轴带动皮轮a进行转动,在皮带的作用下,使得两个风扇同步转动,使得转向过程减小了转动半径,更加迅速。
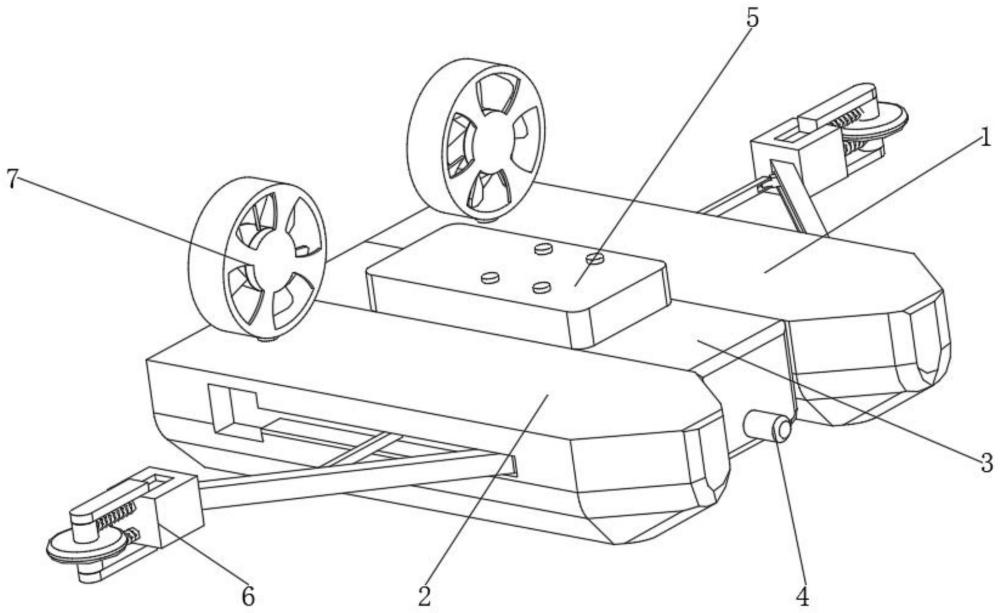
技术特征:1.一种暗涵声呐检测机器人,包括左单片体(1)与右单片体(2),其特征在于:所述左单片体(1)与右单片体(2)之间固定安装有固定支架(3),所述固定支架(3)的正面设置有声呐探头(4),所述固定支架(3)的顶部固定安装有集成控制器(5),所述固定支架(3)的内部设置有辅助机构(6),所述固定支架(3)的内部设置有转向机构(7);
2.根据权利要求1所述的一种暗涵声呐检测机器人,其特征在于:所述展开组件(61)包括第一电机(611)与两个滑道(615),所述第一电机(611)固定安装在固定支架(3)的内部,所述滑道(615)转动安装在左单片体(1)与右单片体(2)的内部,所述第一电机(611)的输出端固定安装有齿轮(612),所述齿轮(612)的外部啮合有齿条(613),所述齿条(613)的内部转动安装有滑块(614)。
3.根据权利要求2所述的一种暗涵声呐检测机器人,其特征在于:所述滑块(614)滑动安装在滑道(615)内部,所述齿条(613)的数量为两个,所述齿条(613)滑动安装在固定支架(3)的内部。
4.根据权利要求2所述的一种暗涵声呐检测机器人,其特征在于:所述减缓组件(62)包括矩形块(621),所述矩形块(621)固定安装在滑道(615)靠近滑块(614)的一端,所述矩形块(621)的内部滑动安装有两个限位架(622),两个所述限位架(622)之间固定安装有圆柱(623),所述圆柱(623)的外部转动安装有滚轮(624),所述圆柱(623)的外部固定安装有两个限位柱(625),所述矩形块(621)的外部固定安装有两个弹簧(626)。
5.根据权利要求4所述的一种暗涵声呐检测机器人,其特征在于:所述弹簧(626)远离矩形块(621)的一端固定安装在圆柱(623)外部,所述限位柱(625)滑动安装在矩形块(621)内部。
6.根据权利要求1所述的一种暗涵声呐检测机器人,其特征在于:所述转向机构(7)包括第二电机(71)与两个转轴(73),所述第二电机(71)固定安装在固定支架(3)的内部,所述转轴(73)转动安装在左单片体(1)的内部,所述第二电机(71)的输出端固定安装有蜗杆(72),所述蜗杆(72)的外部啮合有蜗轮(75),所述转轴(73)的顶部设置有风扇(74),所述转轴(73)的外部固定安装有皮轮a(76),所述皮轮a(76)的外部传动安装有皮带(77),所述皮带(77)的内侧传动安装有皮轮b(78)。
7.根据权利要求6所述的一种暗涵声呐检测机器人,其特征在于:所述皮轮b(78)固定安装在转轴(73)外部,所述蜗轮(75)固定安装在转轴(73)外部。
技术总结本技术涉及地下暗涵检测摸排设施技术领域,且公开了一种暗涵声呐检测机器人,包括左单片体与右单片体,所述左单片体与右单片体之间固定安装有固定支架,所述固定支架的正面设置有声呐探头,所述固定支架的顶部固定安装有集成控制器,所述固定支架的内部设置有辅助机构,所述固定支架的内部设置有转向机构,滑块滑动安装在滑道内部使得滑道展开,使得滚轮与暗河壁接触,使得该装置在前进过程中遭遇水面凸起也能保持平稳,不易侧翻,当暗河墙面有凸起时,限位柱滑动安装在矩形块内部,在弹簧的作用下使得撞力减缓,蜗轮转动使得转轴带动皮轮A进行转动,在皮带的作用下,使得两个风扇同步转动,使得转向过程减小了转动半径,更加迅速。技术研发人员:杨洋,苏聪慧,马文征,李庆鹏受保护的技术使用者:北斗智云(天津)科技有限公司技术研发日:20240202技术公布日:2024/9/17本文地址:https://www.jishuxx.com/zhuanli/20240919/301444.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种变径式管道机器人
下一篇
返回列表