一种带翻转功能的周转箱夹爪的制作方法
- 国知局
- 2024-09-23 14:25:57
本技术属于周转箱抓取设备,具体涉及一种带翻转功能的周转箱夹爪。
背景技术:
1、在管件产品的包装生产过程中,周转箱里的产品,在生产线上不停的流转,在有的工位处,需要将周转箱中的产品,倒入指定位置,传统生产模式中,需要人工进行搬运周转箱及倒料,费时费力,生产效率低。
技术实现思路
1、针对上述问题情况,本实用新型提供一种带翻转功能的周转箱夹爪,在管件类产品包装生产中,用于整个周转箱及产品翻转倒料,解决传统生产模式中,需要人工进行搬运周转箱及倒料,费时费力,生产效率低等技术问题。
2、为了实现上述目的,本实用新型采取的技术方案为:
3、一种带翻转功能的周转箱夹爪,包括夹爪安装底座,在夹爪安装底座两侧对称设置有夹持气缸,夹持气缸通过气缸固定板设置在夹爪安装底座上,在气缸固定板的两侧设置有由滑轨和滑块构成的线性滑轨滑块组件,夹持气缸的伸缩轴连接有推板,所述推板与滑块固定连接,在夹爪安装底座的两侧对称设置有与滑块固定的第一夹爪力臂板和第二夹爪力臂板,在第一夹爪力臂板和第二夹爪力臂板上均设置有对应的轴承旋转轴组件,所述轴承旋转轴组件可转动地连接有直线轴承,所述直线轴承与夹爪板固定设置,在第二夹爪力臂板上设置有伺服电机,所述伺服电机驱动连接有第一伞状齿轮,第一伞状齿轮与固定设置在直线轴承上的第二伞状齿轮相啮合,所述夹爪板用于对周转箱进行夹持。
4、作为本实用新型进一步的技术方案,在第一夹爪力臂板上设置有定位气缸,所述定位气缸的伸缩杆连接有定位头,第一夹爪力臂板一侧的夹爪板上设置有与所述定位头与配合的定位孔,用于对夹爪板进行定位限定。
5、作为本实用新型进一步的技术方案,在夹爪安装底座上还设置有对称的拖链,用于固定夹爪。
6、作为本实用新型进一步的技术方案,在夹爪板的外侧还设置有光电开关,用于限定周转箱翻转的角度。
7、作为本实用新型进一步的技术方案,在两侧夹爪板的对应内侧边缘还设置有夹爪块,用于对周转箱进行夹持。
8、作为本实用新型进一步的技术方案,在气缸定位板下方还设置有托板,其支撑作用。
9、通过本实用新型技术方案,实现了对生产线上周转箱的自动抓取并自动将周转箱翻转倒料,和之前传统生产模式相比,减少了人工劳动量,极大提高了生产效率。
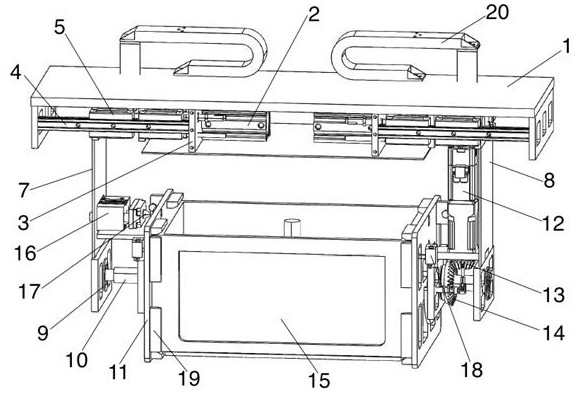
技术特征:1.一种带翻转功能的周转箱夹爪,其特征在于,包括夹爪安装底座(1),在夹爪安装底座(1)两侧对称设置有夹持气缸(2),夹持气缸(2)通过气缸固定板(3)设置在夹爪安装底座(1)上,在气缸固定板(3)的两侧设置有由滑轨(4)和滑块(5)构成的线性滑轨滑块组件,夹持气缸(2)的伸缩轴连接有推板(6),所述推板(6)与滑块(5)固定连接,在夹爪安装底座(1)的两侧对称设置有与滑块(5)固定的第一夹爪力臂板(7)和第二夹爪力臂板(8),在第一夹爪力臂板(7)和第二夹爪力臂板(8)上均设置有对应的轴承旋转轴组件(9),所述轴承旋转轴组件(9)可转动地连接有直线轴承(10),所述直线轴承(10)与夹爪板(11)固定设置,在第二夹爪力臂板(8)上设置有伺服电机(12),所述伺服电机(12)驱动连接有第一伞状齿轮(13),第一伞状齿轮(13)与固定设置在直线轴承(10)上的第二伞状齿轮(14)相啮合,所述夹爪板(11)用于对周转箱(15)进行夹持。
2.根据权利要求1所述的一种带翻转功能的周转箱夹爪,其特征在于,在第一夹爪力臂板(7)上设置有定位气缸(16),所述定位气缸(16)的伸缩杆连接有定位头(17),第一夹爪力臂板(7)一侧的夹爪板(11)上设置有与所述定位头(17)与配合的定位孔,用于对夹爪板(11)进行定位限定。
3.根据权利要求1所述的一种带翻转功能的周转箱夹爪,其特征在于,在夹爪安装底座(1)上还设置有对称的拖链(20),用于固定夹爪。
4.根据权利要求1所述的一种带翻转功能的周转箱夹爪,其特征在于,在夹爪板(11)的外侧还设置有光电开关(18),用于限定周转箱(15)翻转的角度。
5.根据权利要求1所述的一种带翻转功能的周转箱夹爪,其特征在于,在两侧夹爪板(11)的对应内侧边缘还设置有夹爪块(19),用于对周转箱(15)进行夹持。
6.根据权利要求1所述的一种带翻转功能的周转箱夹爪,其特征在于,在气缸固定板(3)下方还设置有托板(21),起支撑作用。
技术总结本技术公开一种带翻转功能的周转箱夹爪,包括夹爪安装底座,在夹爪安装底座上设有夹持气缸,在气缸固定板的两侧设有由滑轨和滑块构成的线性滑轨滑块组件,在夹爪安装底座的两侧对称设有与滑块固定的夹爪力臂板,夹爪力臂板设有对应的轴承旋转轴组件,轴承旋转轴组件连接有直线轴承,直线轴承与夹爪板固定设置,在其一夹爪力臂板上设有伺服电机,伺服电机驱动连接有第一伞状齿轮,第一伞状齿轮与直线轴承上的第二伞状齿轮相啮合,夹爪板用于对周转箱进行夹持;另一夹爪力臂板上设有定位气缸。通过本技术实现了对生产线上周转箱的自动抓取并自动将周转箱翻转倒料,和之前传统生产模式相比,减少了人工劳动量,极大提高了生产效率。技术研发人员:马德耿受保护的技术使用者:临海伟星新型建材有限公司技术研发日:20240103技术公布日:2024/9/19本文地址:https://www.jishuxx.com/zhuanli/20240923/302797.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种砌体工程车的制作方法
下一篇
返回列表